代码解读笔记整理--ConvNext:A ConvNet for the 2020s
四、ConvNext代码
1、大体框架介绍
以ConvNext-Tiny为例:
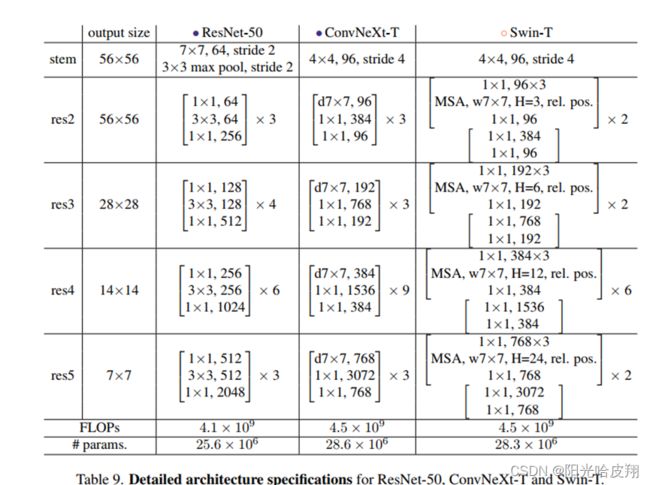
其中,ConvNext包括:
(1)最底层的Stem层:对原始的图像进行预处理。
(2)四个Stage:每个Stage重复若干block,其中重复的次数为深度。
例如:第一个Stage重复了3个block,即深度为3。
(3)分类的代码:对特征进行下采样/池化,然后映射到我们要做分类的类别上。
2、代码解释
代码解释:
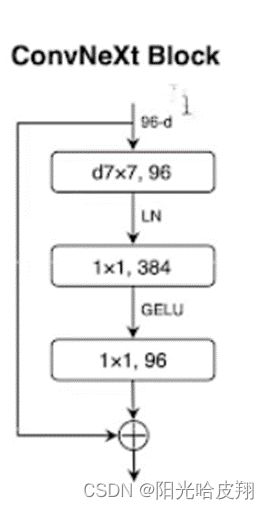
1)第一层为群卷积Group_Conv:设置group_nums=input_channels,其卷积为7x7 输出通道数为96。
2)第二层为1X1的卷积:做通道融合,也可称作一个MLP,即把上一个张量96,映射为384。不考虑周围像素点,只对单个像素点进行考虑,即不考虑空间的局部关联性。
3)第三层为1X1的卷积:即将384映射为96。
4)LN:Layer-Normalization:层归一化。
5)GELU:激活函数。
6)输入输出相结合。
(1)定义Block类:
Class Block(nn.Module): #无论是多大的模块,都需要继承自nn.Module;
(2)定义Class Block类中的init函数:
实例化一些层。
def __init__(self, dim, drop_path=0., layer_scale_init_value=1e-6):
super().__init__()
self.dwconv = nn.Conv2d(dim, dim, kernel_size=7, padding=3, groups=dim) # 实例化二维卷积--depthwise conv(深度可分离卷积),设置groups等于输入通道数
self.norm = LayerNorm(dim, eps=1e-6) #在通道上做层归一化。在做层归一化之前,张量=batchsize x H x W x channels,将张量送至层归一化中,得出均值及方差,其大小为batchsize x H x W,每个均值和方差的向量的大小为通道数目。有了均值和方差便可以进行归一化至正态分布,再引用两个仿射变换参数(权重和偏置),再变换至新的分布。
self.pwconv1 = nn.Linear(dim, 4 * dim) # 利用linear layers 实现1x1 convs(point-wise) ,实现放大4倍
self.act = nn.GELU() #Gelu激活函数
self.pwconv2 = nn.Linear(4 * dim, dim) # 利用linear layers 实现1x1 convs(point-wise) 实现缩小四倍
self.gamma = nn.Parameter(layer_scale_init_value * torch.ones((dim)), requires_grad=True) if layer_scale_init_value > 0 else None
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
(3)定义Class Block类中的forward函数:
在forward函数中,将上述init所实例化的块,进行串连。
def forward(self, x):
input = x # 输入为X
x = self.dwconv(x) # X进入depthwise conv中,得到新的X
x = x.permute(0, 2, 3, 1) # (N, C, H, W) -> (N, H, W, C),X进行转置。此处的permute可进行多个维度的转置。而transpose只能进行两个维度。将C放到最后,便于后面的操作。
x = self.norm(x) # X进行层归一化
x = self.pwconv1(x) # X进行第一层MLP,维度放大4倍
x = self.act(x) # X进行GELU激活
x = self.pwconv2(x) # X进行第二层MLP,维度缩小4倍
if self.gamma is not None:
x = self.gamma * x
x = x.permute(0, 3, 1, 2) # (N, H, W, C) -> (N, C, H, W) ,转置回来
x = input + self.drop_path(x) # X进行残差连接,即输入和输出相连
return x
(4)定义完整ConvNext类:
class ConvNeXt(nn.Module):

(5)定义完整ConvNext类中的init函数:
def __init__(self, in_chans=3, num_classes=1000,
depths=[3, 3, 9, 3], dims=[96, 192, 384, 768], drop_path_rate=0.,
layer_scale_init_value=1e-6, head_init_scale=1.,
out_indices=[0, 1, 2, 3]
):
super().__init__()
self.dims = dims
self.downsample_layers = nn.ModuleList() # stem and 3 intermediate downsampling conv layers
stem = nn.Sequential(#实例化Stem,包括二维卷积和LN,放至容器Sequential
nn.Conv2d(in_chans, dims[0], kernel_size=4, stride=4), LayerNorm(dims[0], eps=1e-6, data_format="channels_first") ) self.downsample_layers.append(stem) for i in range(3): downsample_layer = nn.Sequential( LayerNorm(dims[i], eps=1e-6, data_format="channels_first"), #下采样之前,有一个LN nn.Conv2d(dims[i], dims[i+1], kernel_size=2, stride=2), ) # kernel_size=2, stride=2。类似于Swin Transformer的patch Merging self.downsample_layers.append(downsample_layer) self.stages = nn.ModuleList() # 4 feature resolution stages, each consisting of multiple residual blocks dp_rates=[x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # torch.linspace做线性划分 cur = 0 for i in range(4): # 4个block/stage循环 stage = nn.Sequential( *[Block(dim=dims[i], drop_path=dp_rates[cur + j], layer_scale_init_value=layer_scale_init_value) for j in range(depths[i]) # 每个Stage的深度进行循环] ) self.stages.append(stage) cur += depths[i] # 记录当前总深度 self.norm = nn.LayerNorm(dims[-1], eps=1e-6) # final norm layer,分类之前最后的LN self.head = nn.Linear(dims[-1], num_classes) # 分类层,将维度映射至类 self.apply(self._init_weights) self.head.weight.data.mul_(head_init_scale) self.head.bias.data.mul_(head_init_scale)
(6)定义完整ConvNext类中的init_weights函数:
def _init_weights(self, m):
if isinstance(m, (nn.Conv2d, nn.Linear)):
trunc_normal_(m.weight, std=.02)
nn.init.constant_(m.bias, 0)
(7)定义完整ConvNext类中的forward_features函数:
def forward_features(self, x):
for i in range(4):
x = self.downsample_layers[i](x) # 共有4层下采样,包括每个block之前,以及Stem
x = self.stages[i](x) # 下采样过后,进入到每个stage
return self.norm(x.mean([-2, -1])) # global average pooling, (N, C, H, W) -> (N, C),进行平均池化,将维度的高度和宽度进行平均池化,得到二维张量。
(8)定义完整ConvNext类中的forward函数:
def forward(self, x):
x = self.forward_features(x)
x = self.head(x) # 进入MLP,batchsize映射到1000(imageNet-1k的1000个类别)。
return x