【人脸识别】LBP人脸识别【含GUI Matlab源码 1282期】
⛄一、LBP简介
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikäinen, 和D. Harwood 在1994年提出,用于纹理特征提取。而且,提取的特征是图像的局部的纹理特征;
1 LBP特征的描述
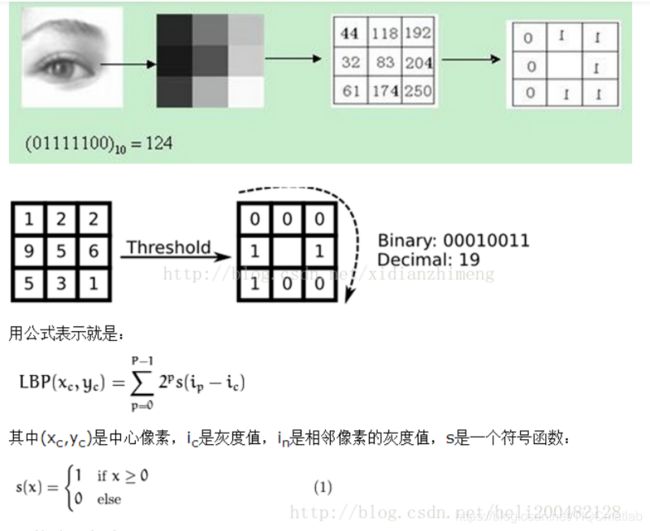
原始的LBP算子定义为在33的窗口内,以窗口中心像素为阈值,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,33邻域内的8个点经比较可产生8位二进制数(通常转换为十进制数即LBP码,共256种),即得到该窗口中心像素点的LBP值,并用这个值来反映该区域的纹理信息。如下图所示:
LBP的改进版本:
原始的LBP提出后,研究人员不断对其提出了各种改进和优化。
(1)圆形LBP算子:
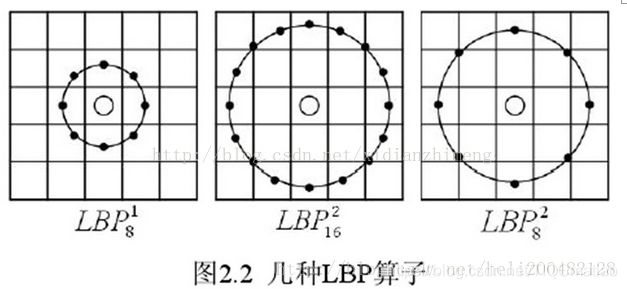
基本的 LBP 算子的最大缺陷在于它只覆盖了一个固定半径范围内的小区域,这显然不能满足不同尺寸和频率纹理的需要。为了适应不同尺度的纹理特征,并达到灰度和旋转不变性的要求,Ojala 等对 LBP 算子进行了改进,将 3×3 邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的 LBP 算子允许在半径为 R 的圆形邻域内有任意多个像素点。从而得到了诸如半径为R的圆形区域内含有P个采样点的LBP算子;
(2)LBP旋转不变模式
从 LBP 的定义可以看出,LBP 算子是灰度不变的,但却不是旋转不变的。图像的旋转就会得到不同的 LBP值。
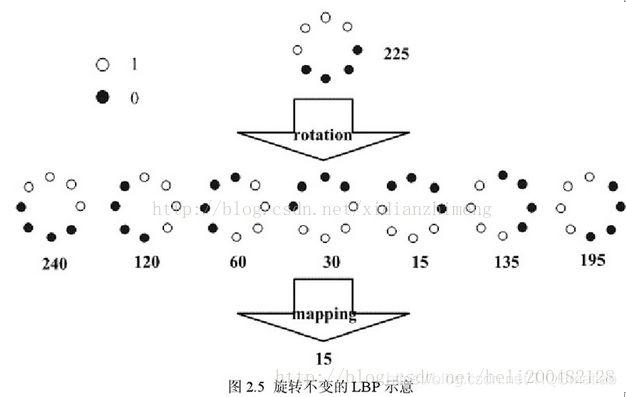
Maenpaa等人又将 LBP 算子进行了扩展,提出了具有旋转不变性的 LBP 算子,即不断旋转圆形邻域得到一系列初始定义的 LBP 值,取其最小值作为该邻域的 LBP 值。
图 2.5 给出了求取旋转不变的 LBP 的过程示意图,图中算子下方的数字表示该算子对应的 LBP 值,图中所示的 8 种 LBP模式,经过旋转不变的处理,最终得到的具有旋转不变性的 LBP 值为 15。也就是说,图中的 8 种 LBP 模式对应的旋转不变的 LBP 模式都是00001111。
(3)LBP等价模式
一个LBP算子可以产生不同的二进制模式,对于半径为R的圆形区域内含有P个采样点的LBP算子将会产生2P2P种模式。很显然,随着邻域集内采样点数的增加,二进制模式的种类是急剧增加的。例如:5×5邻域内20个采样点,有220220=1,048,576种二进制模式。如此多的二值模式无论对于纹理的提取还是对于纹理的识别、分类及信息的存取都是不利的。同时,过多的模式种类对于纹理的表达是不利的。例如,将LBP算子用于纹理分类或人脸识别时,常采用LBP模式的统计直方图来表达图像的信息,而较多的模式种类将使得数据量过大,且直方图过于稀疏。因此,需要对原始的LBP模式进行降维,使得数据量减少的情况下能最好的代表图像的信息。
为了解决二进制模式过多的问题,提高统计性,Ojala提出了采用一种“等价模式”(Uniform Pattern)来对LBP算子的模式种类进行降维。Ojala等认为,在实际图像中,绝大多数LBP模式最多只包含两次从1到0或从0到1的跳变。因此,Ojala将“等价模式”定义为:当某个LBP所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该LBP所对应的二进制就称为一个等价模式类。如00000000(0次跳变),00000111(只含一次从0到1的跳变),10001111(先由1跳到0,再由0跳到1,共两次跳变)都是等价模式类。除等价模式类以外的模式都归为另一类,称为混合模式类,例如10010111(共四次跳变)(这是我的个人理解,不知道对不对)。
通过这样的改进,二进制模式的种类大大减少,而不会丢失任何信息。模式数量由原来的2P2P种减少为 P ( P-1)+2种,其中P表示邻域集内的采样点数。对于3×3邻域内8个采样点来说,二进制模式由原始的256种减少为58种,这使得特征向量的维数更少,并且可以减少高频噪声带来的影响。
2 LBP特征用于检测的原理
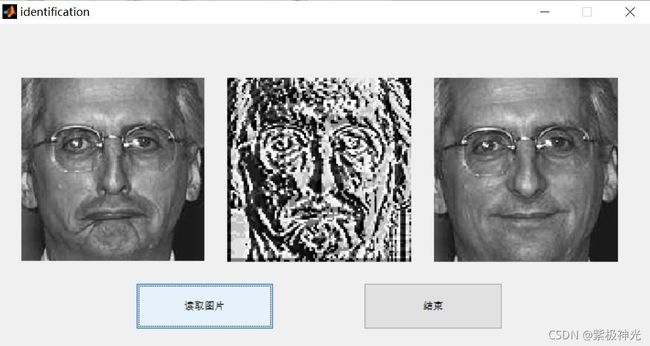
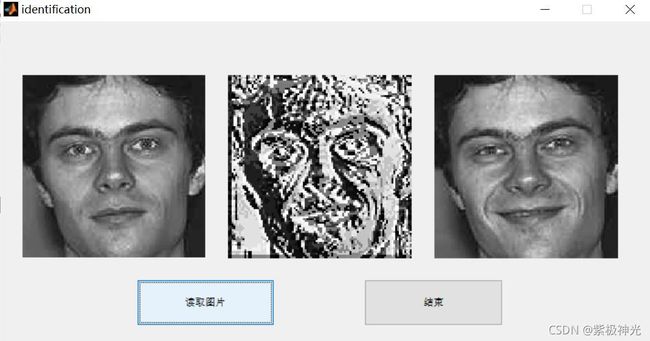
显而易见的是,上述提取的LBP算子在每个像素点都可以得到一个LBP“编码”,那么,对一幅图像(记录的是每个像素点的灰度值)提取其原始的LBP算子之后,得到的原始LBP特征依然是“一幅图片”(记录的是每个像素点的LBP值)。
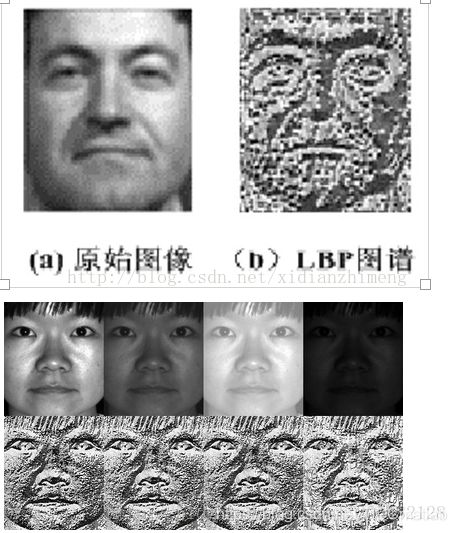
从上图可以看出LBP对光照具有很强的鲁棒性
LBP的应用中,如纹理分类、人脸分析等,一般都不将LBP图谱作为特征向量用于分类识别,而是采用LBP特征谱的统计直方图作为特征向量用于分类识别。
因为,从上面的分析我们可以看出,这个“特征”跟位置信息是紧密相关的。直接对两幅图片提取这种“特征”,并进行判别分析的话,会因为“位置没有对准”而产生很大的误差。后来,研究人员发现,可以将一幅图片划分为若干的子区域,对每个子区域内的每个像素点都提取LBP特征,然后,在每个子区域内建立LBP特征的统计直方图。如此一来,每个子区域,就可以用一个统计直方图来进行描述;整个图片就由若干个统计直方图组成;
例如:一幅100100像素大小的图片,划分为1010=100个子区域(可以通过多种方式来划分区域),每个子区域的大小为1010像素;在每个子区域内的每个像素点,提取其LBP特征,然后,建立统计直方图;这样,这幅图片就有1010个子区域,也就有了1010个统计直方图,利用这1010个统计直方图,就可以描述这幅图片了。之后,我们利用各种相似性度量函数,就可以判断两幅图像之间的相似性了;
3 对LBP特征向量进行提取的步骤
(1)首先将检测窗口划分为16×16的小区域(cell);
(2)对于每个cell中的一个像素,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3邻域内的8个点经比较可产生8位二进制数,即得到该窗口中心像素点的LBP值;
(3)然后计算每个cell的直方图,即每个数字(假定是十进制数LBP值)出现的频率;然后对该直方图进行归一化处理。
(4)最后将得到的每个cell的统计直方图进行连接成为一个特征向量,也就是整幅图的LBP纹理特征向量;
然后便可利用SVM或者其他机器学习算法进行分类了。
LPQ(Local Phase Quantization)算法的原理是假设平滑函数h(x)中心对称,则其傅里叶变换为H(u),对所有H(u)≥0有∠G(u)= ∠F(u),其中F(u)和G(u)分别为原图像和平滑后图像的傅里叶变换,因而在H(u)≥0条件下,图像对平滑有不变性。
为使H(u)≥0,a取为不超过第一个过零点的频率点,其值为a=1/winSize(winSize为输入参数)。分别用f(x)对u1=(a,0),u2=(0,a),u3=(a,a),u4=(a,-a)四个点作STFT,然后分别把四个点的实部和虚部分开,形成一个向量W=[Re{F(u1,x)},Re{F(u2,x)},Re{F(u3,x)},Re{F(u4,x)},Im{F(u1,x)},Im{F(u2,x)},Im{F(u3,x)},Im{F(u4,x)}]T 。
最终得到LPQ变换即为Fx=W*fx。然后对参数进行统计分析,若参数是相关的,则用奇异值分解去相关并且量化。
⛄二、部分源代码
function varargout = identification(varargin)
% IDENTIFICATION MATLAB code for identification.fig
% IDENTIFICATION, by itself, creates a new IDENTIFICATION or raises the existing
% singleton*.
%
% H = IDENTIFICATION returns the handle to a new IDENTIFICATION or the handle to
% the existing singleton*.
%
% IDENTIFICATION(‘CALLBACK’,hObject,eventData,handles,…) calls the local
% function named CALLBACK in IDENTIFICATION.M with the given input arguments.
%
% IDENTIFICATION(‘Property’,‘Value’,…) creates a new IDENTIFICATION or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before identification_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to identification_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE’s Tools menu. Choose “GUI allows only one
% instance to run (singleton)”.
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help identification
% Last Modified by GUIDE v2.5 06-Aug-2021 03:03:30
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct(‘gui_Name’, mfilename, …
‘gui_Singleton’, gui_Singleton, …
‘gui_OpeningFcn’, @identification_OpeningFcn, …
‘gui_OutputFcn’, @identification_OutputFcn, …
‘gui_LayoutFcn’, [] , …
‘gui_Callback’, []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% — Executes just before identification is made visible.
function identification_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to identification (see VARARGIN)
% Choose default command line output for identification
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes identification wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% — Outputs from this function are returned to the command line.
function varargout = identification_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% — Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
[filename,pathname]=uigetfile({‘.jpg’;'.tif’},‘file selector’);
str=[pathname filename];
I=imread(str);
axes(handles.axes1);
imshow(I);
lbp_face=[];
[lbp_face,feature]=lbpfeaturevector2(I,100,20);
axes(handles.axes2);
imshow(feature);
load(‘fb_lbp_face.mat’)
ss=[];
ss=LBP_face(:;
ref_labels=label;
ref_label=number_label;
L=zeros(1,size(ss,2));
text=[];
%d=sum((A-B).^2);
for j=1:size(ss,2)
w=0;
for i=1:size(lbp_face,1)
%w=w+(h(i,1)-ss(i,j))^2;%欧式距离
%w=w-ss(i,j)*(log(h(i,1)+1e-100));%log-likelihood statistic
%w=w+min(ss(i,j),h(i,1));%histogram intersection
w=w+(((ss(i,j)-lbp_face(i,1)).^2)./(ss(i,j)+lbp_face(i,1)+(1e-10)));%chi aquare statistic
end
w=sqrt(w);
L(j)=w;
end
axes(handles.axes3);
imshow(str);
% — Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%用55模板计算LBP特征值
%法一
function [out]=calculatelbp2(mat)
[m,n]=size(mat);
%mat=double(mat);
in=mat;
r=m+4;
c=n+4;
%out=zeros(m,n);
A=zeros(r,c);
r0=3:r-2;
c0=3:c-2;
A(r0,c0)=in;
%alpha=2-sqrt(2);
alpha=0.5;
beta=1-alpha;
d0=A(r0,c0-2)-in;
d2=A(r0+2,c0)-in;
d4=A(r0,c0+2)-in;
d6=A(r0-2,c0)-in;
d1=alphaA(r0+1,c0-1)+betaA(r0+2,c0-2)-in;
d3=alphaA(r0+1,c0+1)+betaA(r0+2,c0+2)-in;
d5=alphaA(r0-1,c0+1)+betaA(r0-2,c0+2)-in;
d7=alphaA(r0-1,c0-1)+beta*A(r0-2,c0-2)-in;
d=[d0(,d1(,d2(,d3(,d4(,d5(,d6(,d7(];
code=2.^(70)';
out =reshape((d>=0)*code,m,n);
%法二
%out=mat2gray(out);
%imshow(out);
%可先声明一个大矩阵,把mat放入矩阵中
% [m,n]=size(mat);
% mat=[zeros(m,2) mat zeros(m,2)];
% mat=[zeros(2,n+4);mat;zeros(2,n+4)];
% A=zeros(5,5);
% p=zeros(1,8);
% k=0;
% lbp=zeros(size(mat));
% h=zeros(1,8);
% for i=3:(m+2)
% for j=3:(n+4)
% lbpnumber=0;
% A=mat(i:i+4,j:j+4);
% k=A(3,3);
% p(2)=(A(1,1)+A(2,2))/2;
% p(3)=A(1,3);
% p(4)=(A(1,5)+A(2,4))/2;
% p(1)=A(3,1);
% p(5)=A(3,5);
% p(8)=(A(5,1)+A(4,2))/2;
% p(7)=A(5,3);
% p(6)=(A(5,5)+A(5,4))/2;
% h=(p>=k);
% for q=1:8
% lbpnumber=lbpnumber+(h(q)2^(8-q));
% end
% lbp(i+2,j+2)=lbpnumber;
% end
% end、
%对应33模板特征值形成特征向量
function [m,f]=lbpfeaturevector(mat,s,n)
[,,d]=size(mat);
if d==3
mat=rgb2gray(mat);
end
mat=double(mat);
mat=imresize(mat,[100 100],‘bicubic’);%归一化
k=calculatelbp(mat);
f=mat2gray(k);
%imshow(f);
k=uint8(k);
m=[];
for i=1:n:s
for j=1:n:s
A=k(i:(i+19),j:(j+19));
h=[];
h=imhist(A);
m=[m;h/(n*n)];
end
end
% lbp(1:2,:)=[];
% lbp((1+m):end,:)=[];
% lbp(:,1:2)=[];
% lbp(:,(1+n):end)=[];
% end
% imshow(lbp,[]);%强制转换为double 类型
⛄三、运行结果
⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]李鹏.基于小波变换和LBP算子的人脸识别研究[J].微型电脑应用. 2022,38(05)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除