python+OpenCv笔记(十六):边缘检测原理(Sobel算子原理、Laplacian算子原理、Canny边缘检测原理)
目录
一、边缘检测原理
二、Sobel检测算子原理
三、Laplacian算子原理
四、Canny边缘检测
1.噪声去除(高斯滤波)
2.计算图像的梯度与梯度方向
3.非极大值抑制NMS
4.双阈值筛选边界
五、边缘检测示例及代码编写(跳转)
一、边缘检测原理
目的:
边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点。
表现形式:
图像属性中的显著变化通常反映了属性的重要事件和变化。边缘的表现形式如下图所示:

图像边缘检测大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。
分类:
有许多方法用于边缘检测,他们的绝大部分可以划分为两类:基于搜索和基于零穿越。
基于搜索∶通过寻找图像一阶导数中的最大值来检测边界,然后利用计算结果估计边缘的局部方向,通常采用梯度的方向,并利用此方向找到局部梯度模的最大值,代表算法是Sobel算子和Scharr算子。
(如若求图一中的边缘,这对图一曲线进行求导,得到图二的求导后曲线,图二中导数最大值的地方即为边界。)

基于零穿越:通过寻找图像二阶导数零穿越来寻找边界,代表算法是Laplacian算子。

二、Sobel检测算子原理
本质:
Sobel算子是图像检测的重要算子之一,其本质是梯度运算。
那什么情况下会产生梯度呢?
例如,对于一张二维图像,
当我们将卷积核放在图像中时,有三种位置关系,如图:

当卷积核放在纯黑或者纯白的图像上时,是没有梯度产生的,只有放在黑白交界处才会产生梯度,比如白色的灰度值为255,黑色的灰度值为0,那么从白色到黑色的梯度即为0-255=-255,当梯度值的大小超过一个阈值后,我们就认为此处为边缘,sobel算子的算法与其类似。(此处为理解,sobel算子算法相对更加复杂)。
原理:
对于不连续的函数,一阶导数可以写做
或
所以有
假设要处理的图像为 I ,在两个方向求导:
- 水平方向:将图像 I 与奇数大小的模板进行卷积,结果为,比如,模板大小为3时,有
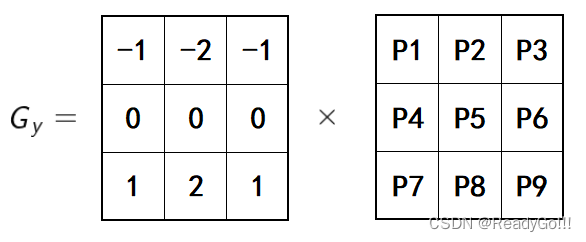
- 垂直方向:将图像 I 与奇数大小的模板进行卷积,结果为,比如,模板大小为3时,有
那么在图像的每一点处,结合以上两个结果可以求出:
可以简化为:
统计极大值的位置,就是图像的边缘。
具体步骤:
1.
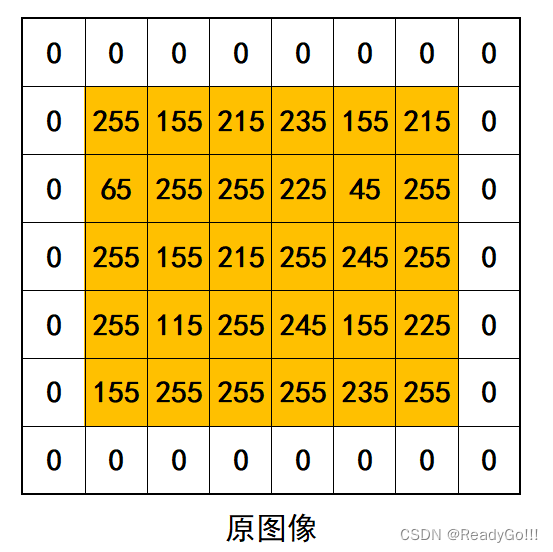
例如,原图像为5*6的矩阵
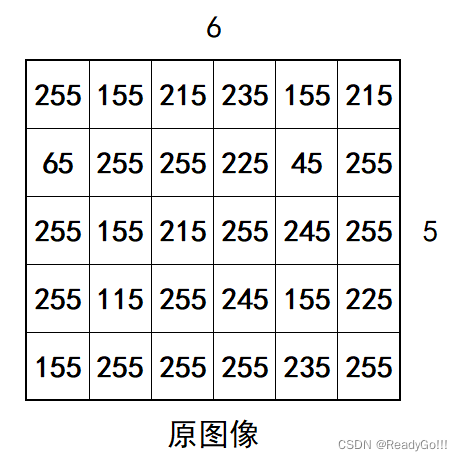
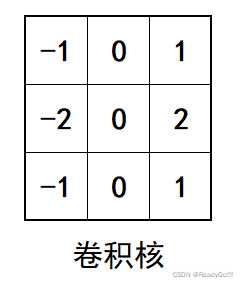
我们拿固定的3*3的sobel算子卷积核与原图像矩阵进行运算(5*5同理,但必须为奇数)
2.
将卷积核在原始图像上进行遍历
第一次为:

第二次为:

最后一次为:

遍历完毕之后,我们看卷积核的核心,它在原图像矩阵上的覆盖范围为:

可以看出,在原图像中,橙色区域都可以经过与卷积核运算而得到相应的梯度值,而周围的白色区域则不能计算出梯度值,在OpenCv中目前不知道是如何处理的,但在深度学习中是这样处理的:我们将原图像的周围再扩展一圈,并填充值为0,如图:
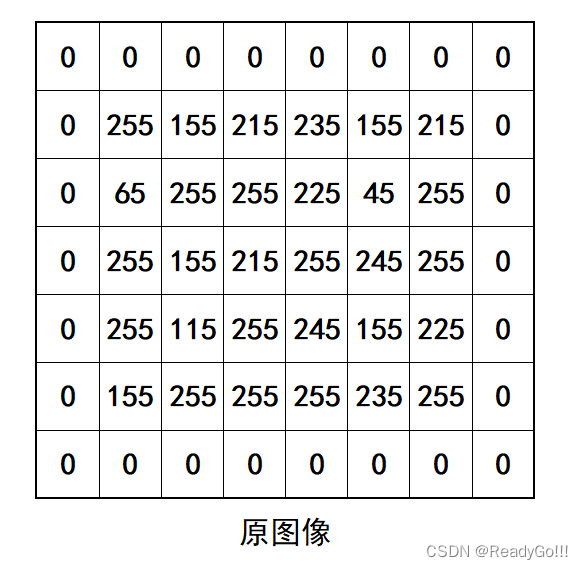
这时,我们再与卷积核运算,就可以将原图像的全部区域都计算出梯度值,如图:
3.
那么在每一次的遍历之中,sobel算子算法是如何求得梯度值的呢?
首先,对于水平方向的梯度,根据上面的计算公式有:

P5点x方向的梯度值为:
在这儿,我们可以理解一下为什么卷积核会有1和2这两个值,1和2代表的是权值,因为对于中心点P5来说,离得越近,对其影响越大,反之越小,所以P4、P6赋予权值为2,其余点赋权值为1。
那么,我们根据梯度计算式可以看出, 是由右边一列减去左边一列(相应列乘以相应的权值)得出的,当左右两列差别特别大的时候,目标点的值会很大,说明该点为边界点。
同理有:
4.
如果目标像素点求得的值小于0或者大于255怎么办呢?
因为原图像的灰度值是8位无符号数,即0-255。OpenCv默认的是截断操作,即小于0按0算,大于255按255算,这样显然是不合理的,比如-240是不能简单看做0来算的。
在python-OpenCv中,我们可以使用16位有符号的数据类型(cv2.CV_16S),处理完图像后,再使用cv2.convertScaleAbs()函数将其转回原来的uint8格式。
最终的处理结果是,对于小于0的数,取绝对值,对于大于255的数,取255。
5.
总梯度:
简化梯度:
参考:
https://www.bilibili.com/video/BV11341127pe?from=search&seid=11602454197720109774&spm_id_from=333.337.0.0 https://www.bilibili.com/video/BV11341127pe?from=search&seid=11602454197720109774&spm_id_from=333.337.0.0
https://www.bilibili.com/video/BV11341127pe?from=search&seid=11602454197720109774&spm_id_from=333.337.0.0
三、Laplacian算子原理
原理:
Laplacian是利用二阶导数来检测边缘,因为图像是二维的,我们需要在两个方向上求导,如下式所示:
在图像中,将该方程表示为离散的形式,
一维情况:
二维情况:
所以由方程可以得出,laplacian算子使用的卷积核为:
具体步骤:
(具体步骤与Sobel算子基本相似,可参考上文的Sobel算子原理步骤)
这里给出卷积核与图像的运算过程:
例如,分别有卷积核与原图像矩阵:
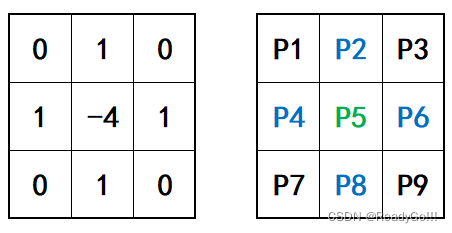
则P5点的梯度值为:
四、Canny边缘检测
Canny边缘检测主要由四步组成:
- 噪声去除(高斯滤波)
- 计算图像的梯度与梯度方向
- 非极大值抑制
- 双阈值筛选边界
1.噪声去除(高斯滤波)
由于边缘检测容易受到噪声的影响,所以首先使用5*5高斯滤波器去除噪声。
高斯滤波原理详见文章:
python+OpenCv笔记(十):高斯滤波https://blog.csdn.net/qq_45832961/article/details/122351534
2.计算图像的梯度与梯度方向
对高斯滤波平滑后的图像使用Sobel算子计算水平和竖直方向的一阶导数(和),根据得到的和找到边界的梯度和方向,公式如下:
Sobel算子原理详见本文的第二篇:Sobel检测算子原理
如果某个像素点是边缘,则其梯度方向总与边缘垂直,。
梯度方向被分为四类:垂直、水平和两个对角线方向。
3.非极大值抑制NMS
在获得梯度的大小和方向之后,对整幅图像进行扫描,去除那些非边界上的点。
即对每一个像素进行检查,看这个点的梯度在周围具有相同梯度方向的点中是不是最大的
如图:

A点位于图像的边缘,在其梯度变化方向,选择像素点B和C,用来检验A点的梯度是否为极大值,若为极大值,则进行保留,否则A点被抑制,最终的结果是具有“细边”的二进制图像。
(即我们第二步求得的边界可能是ABC,边缘较粗,这时如果A的梯度值均大于B、C,我们进行非极大值抑制后就只剩下了A,从而达到了边缘细化的效果。)
当然,梯度方向被分为四类:垂直、水平和两个对角线方向,我们将其梯度方向近似为以下值中的一个(0,45,90,135,180,225,270,315),例如30度近似为45度。
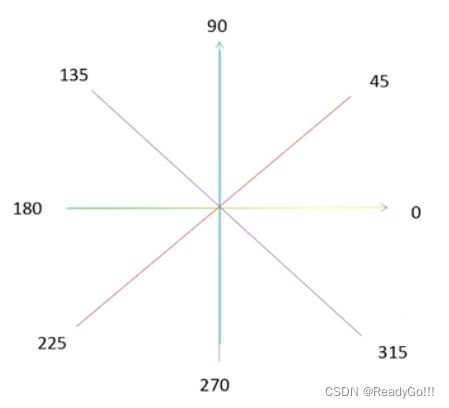
例如,当一个像素点的梯度方向为45度时,我们就在45度与225度(正反方向)两个方向上进行比较,从而决定保留还是抑制。
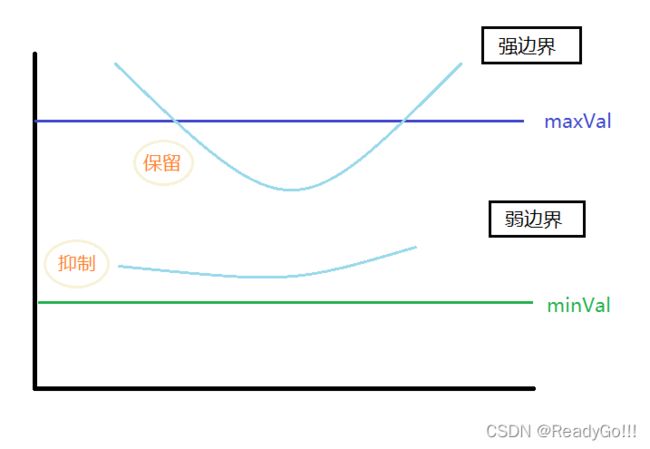
4.双阈值筛选边界
现在要确定真正的边界。我们设置两个阈值: 阈值下界(minVal)和 阈值上界(maxVal)。当图像的灰度梯度高于maxVal时被认为是真的边界(强边界),低于minVal的边界必然不是边界,会被抛弃。如果介于两者之间的话,我们称其为弱边界,和强边界相连的弱边界认为是边界,其他的弱边界则被抑制。如下图:
五、边缘检测示例及代码编写(跳转)
- Sobel算子
python+OpenCv笔记(十三):边缘检测——Sobel检测算子https://blog.csdn.net/qq_45832961/article/details/122396761 - Laplacian算子
python+OpenCv笔记(十四):边缘检测——laplacian算子https://blog.csdn.net/qq_45832961/article/details/122429117 - Canny边缘检测
python+OpenCv笔记(十五):边缘检测——Canny边缘检测https://blog.csdn.net/qq_45832961/article/details/122441575