ESP32中micro-ROS与ROS2通信(点亮esp32指示灯)
前言
micro-ROS,是基于ROS2进行优化的一套轻量级ROS系统,它提供了完全部署的ROS 2生态系统的大多数吸引人的工具和功能,并具有入式和低资源设备的卓越能力,可以运行在MCU硬件平台。
传统上,即使机器人包含许多ROS,ROS仍停留在微控制器边界。它们通常通过串行协议与旧版ROS中的ROS-serial之类的工具集成在一起。
micro-ROS不仅仅在机器人领域可以使用,也可以拓展到物联网领域。最重要的是micro-ROS可以将机器人的生态与mcu微控制器的生态融合在一起。本篇将给大家演示如何用microROS点亮esp32指示灯。极客玩家可以拓展的接几个继电器和灯,在家里使用。
演示环境
MCU:ESP-WROOM-32
ROS2DDS代理端:WSL2-Ubuntu22.04(可以换成虚拟机或实体机) #需安装 ROS2及MicroXRCEAgent
编程环境:Arduino IDE 2.0.3 (需安装micro_ros_arduino库)
具体步骤
首先需要找一根走数据的数据线电脑串口连接到esp32上,打开Arduino IDE,选择对应开发板串口等信息,刷入以下程序到开发板:
#include 刷入程序一段时间后会发现开发板的灯不断闪烁,这是因为还没有连接到ROS2代理端。
接下来打开WSL2终端,再打开一个powershell,将串口设备挂到WSL中。
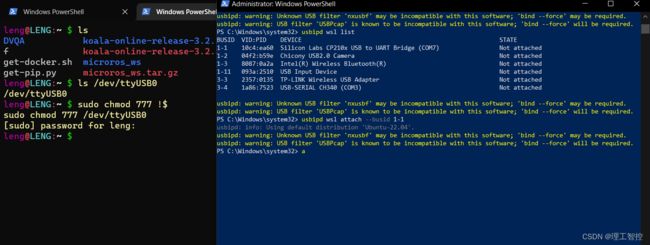
#windows需要下载usbipd 将设备挂入wsl
usbipd wsl list
usbipd wsl attach --busid 1-1
在WSL中发现设备后,给予权限。
sudo chmod 777 /dev/ttyUSB0
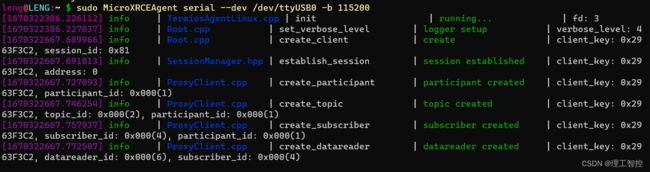
启动Micro-XRCE-DDS-Agent。
#需要指定设备串口号和波特率
#MicroXRCEAgent自行百度安装
sudo MicroXRCEAgent serial --dev /dev/ttyUSB0 -b 115200

这个时候按一下esp32上的复位键,看到出现以下内容及连接成功。
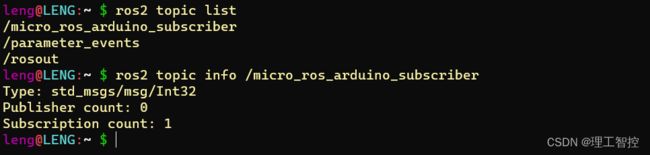
查看microROS节点接入。
ros2 topic list

这时候发现esp32开发板指示灯常亮。
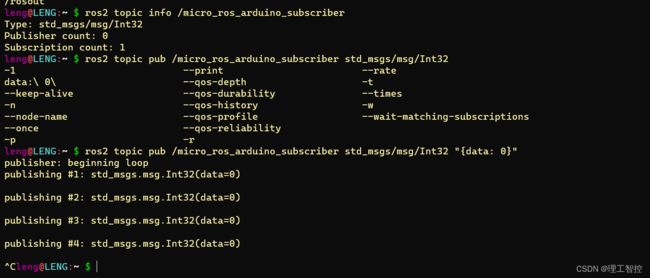
查看上面节点信息:
ros2 topic info /micro_ros_arduino_subscriber
发布以下内容小灯关闭。
ros2 topic pub /micro_ros_arduino_subscriber std_msgs/msg/Int32 "{data: 0}"
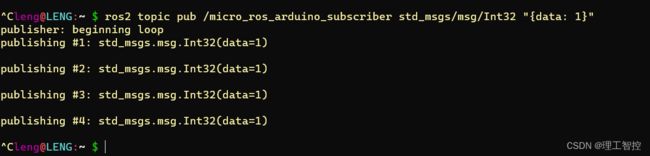
发布以下内容小灯打开。
ros2 topic pub /micro_ros_arduino_subscriber std_msgs/msg/Int32 "{data: 1}"