Python OpenCV利用四个点对最小外接矩形进行裁剪
参考了文章https://blog.csdn.net/u014662865/article/details/105125361并对代码做出一定的修改
由于项目需要将图片中的各个字符识别出来,试了各种方式都不太好,最终决定先识别区域,再识别文字位置,再识别文字,这样就要对识别到的区域做矫正了,但是opencv又没有直接矫正的函数,只能自己手动完成了。
具体思路就是先画出最小外接矩形,再根据最小外接矩形的中心与旋转角度对图片和矩形的四个点进行旋转,旋转到水平时再裁切。
直接上代码
class Rotate:
def __init__(self, img, box, rect):
self.img = img # 原始图像
self.box = box # cv2.boxPoints(rect) for OpenCV 3.x 获取最小外接矩形的4个顶点坐标
self.rect = rect # 得到最小外接矩形的(中心(x,y), (宽,高), 旋转角度)
def getImg(self):
# 做旋转图像
# 这里外接矩形的旋转角度是无法确定的,
# 且由于**作者个人**的素材图片的最大选旋转角度不会超过45°,所以这里加以限制
if abs(self.rect[2]) > 45:
roat = 90.00 - abs(self.rect[2])
else:
roat = self.rect[2]
m = cv2.getRotationMatrix2D(self.rect[0], roat, 1)
dst = cv2.warpAffine(self.img, m, (2 * self.img.shape[0], 2 * self.img.shape[1]))
box = self.rotatecordiate(roat, self.box, self.rect[0][0], self.rect[0][1])
a = self.imagecrop(dst, np.int0(box))
return a
# 逆时针旋转
def Nrotate(self, angle, valuex, valuey, pointx, pointy):
angle = (angle / 180) * math.pi
valuex = np.array(valuex)
valuey = np.array(valuey)
nRotatex = (valuex - pointx) * math.cos(angle) - (valuey - pointy) * math.sin(angle) + pointx
nRotatey = (valuex - pointx) * math.sin(angle) + (valuey - pointy) * math.cos(angle) + pointy
return nRotatex, nRotatey
# 顺时针旋转
def Srotate(self, angle, valuex, valuey, pointx, pointy):
angle = (angle / 180) * math.pi
valuex = np.array(valuex)
valuey = np.array(valuey)
sRotatex = (valuex - pointx) * math.cos(angle) + (valuey - pointy) * math.sin(angle) + pointx
sRotatey = (valuey - pointy) * math.cos(angle) - (valuex - pointx) * math.sin(angle) + pointy
return sRotatex, sRotatey
# 将四个点做映射
def rotatecordiate(self, angle, rectboxs, pointx, pointy):
output = []
angle = angle
for rectbox in rectboxs:
if angle > 0:
output.append(self.Srotate(angle, rectbox[0], rectbox[1], pointx, pointy))
else:
output.append(self.Nrotate(-angle, rectbox[0], rectbox[1], pointx, pointy))
return output
def imagecrop(self, image, box):
xs = [x[1] for x in box]
ys = [x[0] for x in box]
# print(xs)
# print(min(xs), max(xs), min(ys), max(ys))
cropimage = image[min(xs):max(xs), min(ys):max(ys)]
# print(cropimage.shape)
# cv2.imwrite('cropimage.png', cropimage)
return cropimage
用法:
# 查找图片轮廓,注意图片是8UC1格式
img = cv2.imread("***************")
contours, hierarchy = cv2.findContours(result, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
imgs = []
for cnt in contours:
rect = cv2.minAreaRect(cnt) # 得到最小外接矩形的(中心(x,y), (宽,高), 旋转角度)
box = cv2.boxPoints(rect) # cv2.boxPoints(rect) for OpenCV 3.x 获取最小外接矩形的4个顶点坐标
imgs.append(Rotate(img, box, rect).getImg())
for i in range(len(imgs)):
cv2.imshow(f"img-{i}", imgs[i])
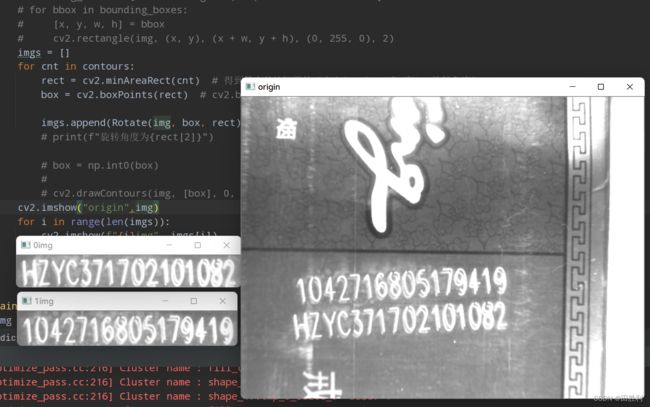
运行效果如下图