stanford arm之正逆運動學解析及代碼
由於這學期修習了機器人學,因此來練習並記錄一下自己使用C++代碼演算的過程
代碼位址:GitHub - ouotingwei/Robotic_Project_1: 國立陽明交通大學電控工程研究所-機器人學之課堂project (Stanford Arm運動解算)
stanford arm之D-H form 如下

1. kinematics
給定每個關節角或長度變數,由基座標推得工具座標得位姿

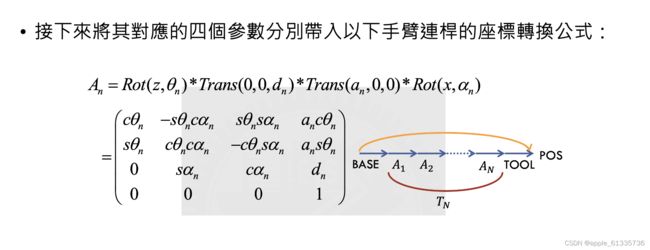
最後由T6 = A1*A2*A3*A4*A5*A6即可求出最終的noap矩陣
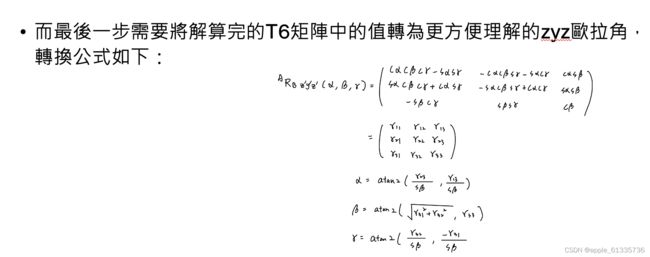
為方便在卡氏坐標中表示,可以透過簡單的換算得到z-y-z尤拉角
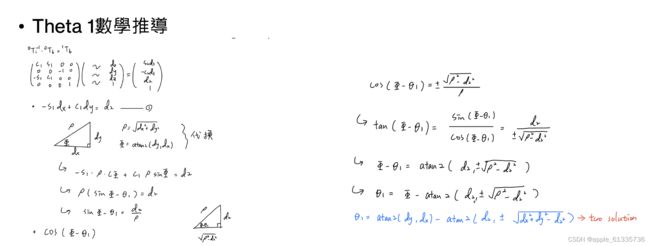
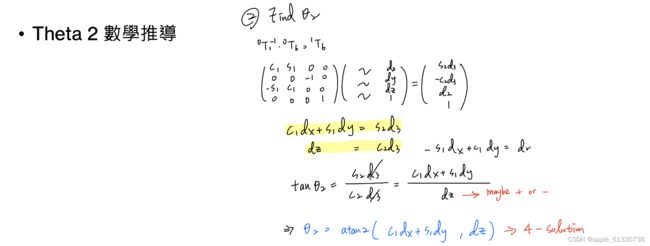
2.inverse kinematics
給定最終工具座標的位姿(noap)反推出各關節角或長度的組合




3.代碼實現
輸入joint variable:

輸入cartesian point
#include
#include
#include
//FUNCTION
void choose_input_mode();
void joint_variables_mode_input();
void CartesianPoint_input();
void joint_variables_mode_output();
void CartesianPoint_output();
void output_check(double JOINT_VARIABLE_SOLUTION[6]);
//GLOBAL VARIABLE
double PI = 3.141593;
double d2 = 6.375000;
char mode;
double CartesianPoint[4]={0,0,0,0}; // [0] = n, [1] = o, [2] = a, [3] = p
double joint_variables[6]={0,0,0,0,0,0}; // [0] = θ1, [1] = θ2, [2] = d3 , [3] = θ4, [4] = θ5, [5] = d6
Eigen::Matrix noap_input;
//8 solution by calculation
double JOINT_VARIABLE_SOLUTION_1[6] = {0,0,0,0,0,0};
double JOINT_VARIABLE_SOLUTION_2[6] = {0,0,0,0,0,0};
double JOINT_VARIABLE_SOLUTION_3[6] = {0,0,0,0,0,0};
double JOINT_VARIABLE_SOLUTION_4[6] = {0,0,0,0,0,0};
double JOINT_VARIABLE_SOLUTION_5[6] = {0,0,0,0,0,0};
double JOINT_VARIABLE_SOLUTION_6[6] = {0,0,0,0,0,0};
double JOINT_VARIABLE_SOLUTION_7[6] = {0,0,0,0,0,0};
double JOINT_VARIABLE_SOLUTION_8[6] = {0,0,0,0,0,0};
//WHILE FLAG
bool while_flag = false;
//NAMESPACE
using namespace Eigen;
using namespace std;
int main(){
noap_input << 0, 0, 0, 0,
0, 0, 0, 0,
0, 0, 0, 0,
0, 0, 0, 1;
while(1){ //press ctrl-c to stop the loop
choose_input_mode();
if(mode == 'a'){ //choose mode a will into this loop
CartesianPoint_input();
CartesianPoint_output();
output_check(JOINT_VARIABLE_SOLUTION_1);
output_check(JOINT_VARIABLE_SOLUTION_2);
output_check(JOINT_VARIABLE_SOLUTION_3);
output_check(JOINT_VARIABLE_SOLUTION_4);
output_check(JOINT_VARIABLE_SOLUTION_5);
output_check(JOINT_VARIABLE_SOLUTION_6);
output_check(JOINT_VARIABLE_SOLUTION_7);
output_check(JOINT_VARIABLE_SOLUTION_8);
cout<<"-----------------------------------"< which mode do you want ?"< enter a"< enter b"<>mode;
if(mode == 'b' || mode == 'a'){
while_flag = true;
}else{
cout<<"[input error] Please choose again"< please enter joint variables "< please enter Cartesian Point [n, o, a, p] : "<>noap_input(0, 0) >> noap_input(0, 1) >> noap_input(0, 2) >> noap_input(0, 3);
cout<<" please enter ny , oy , ay , py : ";
cin>>noap_input(1, 0) >> noap_input(1, 1) >> noap_input(1, 2) >> noap_input(1, 3);
cout<<" please enter nz , oz , az , pz : ";
cin>>noap_input(2, 0) >> noap_input(2, 1) >> noap_input(2, 2) >> noap_input(2, 3);
//test data
/*
noap_input(0, 0) = 0.312899788315632; //n
noap_input(1, 0) = 0.777300157424024;
noap_input(2, 0) = -0.545800501777546;
noap_input(3, 0) = 0;
noap_input(0, 1) = -0.777300157424024; //o
noap_input(1, 1) = 0.539800721952620;
noap_input(2, 1) = 0.323140288184588;
noap_input(3, 1) = 0;
noap_input(0, 2) = 0.545800501777546; //a
noap_input(1, 2) = 0.323140288184588;
noap_input(2, 2) = 0.773099066363012;
noap_input(3, 2) = 0;
noap_input(0, 3) = 4.247497683164255; //p
noap_input(1, 3) = 8.330096026320385;
noap_input(2, 3) = 18.793852415718170;
noap_input(3, 3) = 1;
*/
cout<<"-----------------------------------"< A1;
Matrix A2;
Matrix A3;
Matrix A4;
Matrix A5;
Matrix A6;
Matrix T6;
A1 << cos(joint_variables[0]), 0, -1*sin(joint_variables[0]), 0,
sin(joint_variables[0]), 0, cos(joint_variables[0]), 0,
0 , -1, 0, 0,
0 , 0, 0, 1;
A2 << cos(joint_variables[1]), 0, sin(joint_variables[1]), 0,
sin(joint_variables[1]), 0, -1*cos(joint_variables[1]), 0,
0 , 1, 0, 6.375,
0 , 0, 0, 1;
A3 << 1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, joint_variables[2],
0, 0, 0, 1;
A4 << cos(joint_variables[3]), 0, -1*sin(joint_variables[3]), 0,
sin(joint_variables[3]), 0, cos(joint_variables[3]), 0,
0 , -1, 0, 0,
0 , 0, 0, 1;
A5 << cos(joint_variables[4]), 0, sin(joint_variables[4]), 0,
sin(joint_variables[4]), 0, -1*cos(joint_variables[4]), 0,
0 , 1, 0, 0,
0 , 0, 0, 1;
A6 << cos(joint_variables[5]), -1*sin(joint_variables[5]), 0, 0,
sin(joint_variables[5]), cos(joint_variables[5]), 0, 0,
0 , 0 , 1, 0,
0 , 0 , 0, 1;
T6 << 0, 0, 0, 0,
0, 0, 0, 0,
0, 0, 0, 0,
0, 0, 0, 0;
T6 = (A1*(A2*(A3*(A4*(A5*A6))))); // 1T6 MATRIX
//euler angle z-y-z (x, y, z)
x = T6(0,3);
y = T6(1,3);
z = T6(2,3);
//euler angle z-y-z (ϕ, θ, ψ)
// B = θ , A = ϕ , C = ψ
B = atan2(sqrt(pow(T6(2, 0), 2) + pow(T6(2, 1), 2)), T6(2, 2))*180/PI;
A = atan2((T6(1, 2)/sin(B)), (T6(0, 2)/sin(B)))*180/PI;
C = atan2((T6(2, 1)/sin(B)), (-1*T6(2, 0)/sin(B)))*180/PI;
//show solution
cout<<"(n, o, a, p) = "< two solution
//θ1-1 (20)
theta_1_1 = atan2(noap_input(1, 3), noap_input(0, 3)) - atan2(d2, sqrt(pow(noap_input(0, 3), 2) + pow(noap_input(1, 3), 2) - pow(d2, 2)));
JOINT_VARIABLE_SOLUTION_5[0] = (theta_1_1*180/PI);
JOINT_VARIABLE_SOLUTION_6[0] = (theta_1_1*180/PI);
JOINT_VARIABLE_SOLUTION_7[0] = (theta_1_1*180/PI);
JOINT_VARIABLE_SOLUTION_8[0] = (theta_1_1*180/PI);
//θ1-2 (-74)
theta_1_2 = (atan2(noap_input(1, 3), noap_input(0, 3)) - atan2(d2, -1*sqrt(pow(noap_input(0, 3), 2) + pow(noap_input(1, 3), 2) - pow(d2, 2))));
JOINT_VARIABLE_SOLUTION_1[0] = (theta_1_2*180/PI);
JOINT_VARIABLE_SOLUTION_2[0] = (theta_1_2*180/PI);
JOINT_VARIABLE_SOLUTION_3[0] = (theta_1_2*180/PI);
JOINT_VARIABLE_SOLUTION_4[0] = (theta_1_2*180/PI);
//θ2 -> four solution
//θ2-1 (20)
theta_2_1 = atan2((cos(theta_1_1)*noap_input(0, 3)) + (sin(theta_1_1)*noap_input(1, 3)), noap_input(2, 3));
JOINT_VARIABLE_SOLUTION_5[1] = (theta_2_1*180/PI);
JOINT_VARIABLE_SOLUTION_6[1] = (theta_2_1*180/PI);
//θ2-2 (160)
theta_2_2 = atan2((cos(theta_1_1)*noap_input(0, 3)) + (sin(theta_1_1)*noap_input(1, 3)), -1*noap_input(2, 3));
JOINT_VARIABLE_SOLUTION_3[1] = (theta_2_2*180/PI);
JOINT_VARIABLE_SOLUTION_4[1] = (theta_2_2*180/PI);
//θ2-3 (-20)
theta_2_3 = atan2((cos(theta_1_2)*noap_input(0, 3)) + (sin(theta_1_2)*noap_input(1, 3)), noap_input(2, 3));
JOINT_VARIABLE_SOLUTION_1[1] = (theta_2_3*180/PI);
JOINT_VARIABLE_SOLUTION_2[1] = (theta_2_3*180/PI);
//θ2-4 (-160)
theta_2_4 = atan2((cos(theta_1_2)*noap_input(0, 3)) + (sin(theta_1_2)*noap_input(1, 3)), -1*noap_input(2, 3));
JOINT_VARIABLE_SOLUTION_7[1] = (theta_2_4*180/PI);
JOINT_VARIABLE_SOLUTION_8[1] = (theta_2_4*180/PI);
//d3 -> two solution
//d_3_1 (20)
d_3_1 = noap_input(2, 3) / cos(theta_2_1);
JOINT_VARIABLE_SOLUTION_1[2] = d_3_1;
JOINT_VARIABLE_SOLUTION_2[2] = d_3_1;
JOINT_VARIABLE_SOLUTION_5[2] = d_3_1;
JOINT_VARIABLE_SOLUTION_6[2] = d_3_1;
//d_3_2 (-20)
d_3_2 = noap_input(2, 3) / cos(theta_2_2);
JOINT_VARIABLE_SOLUTION_3[2] = d_3_2;
JOINT_VARIABLE_SOLUTION_4[2] = d_3_2;
JOINT_VARIABLE_SOLUTION_7[2] = d_3_2;
JOINT_VARIABLE_SOLUTION_8[2] = d_3_2;
//θ4 -> eight solution
//θ4-1 (79)
theta_4_1_1 = atan2((-1*sin(theta_1_2)*noap_input(0, 2)) + (cos(theta_1_2)*noap_input(1, 2)), (cos(theta_1_2)*cos(theta_2_3)*noap_input(0, 2)) + (sin(theta_1_2)*cos(theta_2_3)* noap_input(1, 2)) - (sin(theta_2_3)*noap_input(2, 2)));
JOINT_VARIABLE_SOLUTION_1[3] = theta_4_1_1*180/PI;
//θ4-1 - 180 (-100)
theta_4_1_2 = ((theta_4_1_1*180/PI) - 180)*PI/180;
JOINT_VARIABLE_SOLUTION_2[3] = theta_4_1_2*180/PI;
//θ4-2(100)
theta_4_2_1 = atan2((-1*sin(theta_1_2)*noap_input(0, 2)) + (cos(theta_1_2)*noap_input(1, 2)), (cos(theta_1_2)*cos(theta_2_2)*noap_input(0, 2)) + (sin(theta_1_2)*cos(theta_2_2)* noap_input(1, 2)) - (sin(theta_2_2)*noap_input(2, 2)));
JOINT_VARIABLE_SOLUTION_3[3] = theta_4_2_1*180/PI;
//θ4-2 - 180 (-79)
theta_4_2_2 = ((theta_4_2_1*180/PI) - 180)*PI/180;
JOINT_VARIABLE_SOLUTION_4[3] = theta_4_2_2*180/PI;
//θ4-3 (20)
theta_4_3_1 = atan2((-1*sin(theta_1_1)*noap_input(0, 2)) + (cos(theta_1_1)*noap_input(1, 2)), (cos(theta_1_1)*cos(theta_2_1)*noap_input(0, 2)) + (sin(theta_1_1)*cos(theta_2_1)* noap_input(1, 2)) - (sin(theta_2_1)*noap_input(2, 2)));
JOINT_VARIABLE_SOLUTION_5[3] = theta_4_3_1*180/PI;
//θ4-3 - 180 (-160)
theta_4_3_2 = ((theta_4_3_1*180/PI) - 180)*PI/180;
JOINT_VARIABLE_SOLUTION_6[3] = theta_4_3_2*180/PI;
//θ4-4 (160)
theta_4_4_1 = atan2((-1*sin(theta_1_1)*noap_input(0, 2)) + (cos(theta_1_1)*noap_input(1, 2)), (cos(theta_1_1)*cos(theta_2_4)*noap_input(0, 2)) + (sin(theta_1_1)*cos(theta_2_4)* noap_input(1, 2)) - (sin(theta_2_4)*noap_input(2, 2)));
JOINT_VARIABLE_SOLUTION_7[3] = theta_4_4_1*180/PI;
//θ4-4 - 180 (-20)
theta_4_4_2 = ((theta_4_4_1*180/PI) - 180)*PI/180;
JOINT_VARIABLE_SOLUTION_8[3] = theta_4_4_2*180/PI;
//θ5 -> eight solution
//θ5-1
temp_a = ((cos(theta_1_2)*cos(theta_2_3)*cos(theta_4_1_1) - sin(theta_1_2)*sin(theta_4_1_1))*noap_input(0 ,2)) + ((sin(theta_1_2)*cos(theta_2_3)*cos(theta_4_1_1) + cos(theta_1_2)*sin(theta_4_1_1))*noap_input(1, 2)) + ((-1*sin(theta_2_3)*cos(theta_4_1_1))*noap_input(2, 2));
temp_b = (cos(theta_1_2)*sin(theta_2_3)*noap_input(0, 2)) + (sin(theta_1_2)*sin(theta_2_3)*noap_input(1, 2)) + (cos(theta_2_3)*noap_input(2, 2));
theta_5_1_1 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_1[4] = theta_5_1_1*180/PI;
//θ5-1-2
temp_a = ((cos(theta_1_2)*cos(theta_2_3)*cos(theta_4_1_2) - sin(theta_1_2)*sin(theta_4_1_2))*noap_input(0 ,2)) + ((sin(theta_1_2)*cos(theta_2_3)*cos(theta_4_1_2) + cos(theta_1_2)*sin(theta_4_1_2))*noap_input(1, 2)) + ((-1*sin(theta_2_3)*cos(theta_4_1_2))*noap_input(2, 2));
temp_b = (cos(theta_1_2)*sin(theta_2_3)*noap_input(0, 2)) + (sin(theta_1_2)*sin(theta_2_3)*noap_input(1, 2)) + (cos(theta_2_3)*noap_input(2, 2));
theta_5_1_2 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_2[4] = theta_5_1_2*180/PI;
//θ5-2-1
temp_a = ((cos(theta_1_2)*cos(theta_2_2)*cos(theta_4_2_1) - sin(theta_1_2)*sin(theta_4_2_1))*noap_input(0 ,2)) + ((sin(theta_1_2)*cos(theta_2_2)*cos(theta_4_2_1) + cos(theta_1_2)*sin(theta_4_2_1))*noap_input(1, 2)) + ((-1*sin(theta_2_2)*cos(theta_4_2_1))*noap_input(2, 2));
temp_b = (cos(theta_1_2)*sin(theta_2_2)*noap_input(0, 2)) + (sin(theta_1_2)*sin(theta_2_2)*noap_input(1, 2)) + (cos(theta_2_2)*noap_input(2, 2));
theta_5_2_1 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_3[4] = theta_5_2_1*180/PI;
//θ5-2-2
temp_a = ((cos(theta_1_2)*cos(theta_2_2)*cos(theta_4_2_2) - sin(theta_1_2)*sin(theta_4_2_2))*noap_input(0 ,2)) + ((sin(theta_1_2)*cos(theta_2_2)*cos(theta_4_2_2) + cos(theta_1_2)*sin(theta_4_2_2))*noap_input(1, 2)) + ((-1*sin(theta_2_2)*cos(theta_4_2_2))*noap_input(2, 2));
temp_b = (cos(theta_1_2)*sin(theta_2_2)*noap_input(0, 2)) + (sin(theta_1_2)*sin(theta_2_2)*noap_input(1, 2)) + (cos(theta_2_2)*noap_input(2, 2));
theta_5_2_2 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_4[4] = theta_5_2_2*180/PI;
//θ5-3-1
temp_a = ((cos(theta_1_1)*cos(theta_2_1)*cos(theta_4_3_1) - sin(theta_1_1)*sin(theta_4_3_1))*noap_input(0 ,2)) + ((sin(theta_1_1)*cos(theta_2_1)*cos(theta_4_3_1) + cos(theta_1_1)*sin(theta_4_3_1))*noap_input(1, 2)) + ((-1*sin(theta_2_1)*cos(theta_4_3_1))*noap_input(2, 2));
temp_b = (cos(theta_1_1)*sin(theta_2_1)*noap_input(0, 2)) + (sin(theta_1_1)*sin(theta_2_1)*noap_input(1, 2)) + (cos(theta_2_1)*noap_input(2, 2));
theta_5_3_1 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_5[4] = theta_5_3_1*180/PI;
//θ5-3-2
temp_a = ((cos(theta_1_1)*cos(theta_2_1)*cos(theta_4_3_2) - sin(theta_1_1)*sin(theta_4_3_2))*noap_input(0 ,2)) + ((sin(theta_1_1)*cos(theta_2_1)*cos(theta_4_3_2) + cos(theta_1_1)*sin(theta_4_3_2))*noap_input(1, 2)) + ((-1*sin(theta_2_1)*cos(theta_4_3_2))*noap_input(2, 2));
temp_b = (cos(theta_1_1)*sin(theta_2_1)*noap_input(0, 2)) + (sin(theta_1_1)*sin(theta_2_1)*noap_input(1, 2)) + (cos(theta_2_1)*noap_input(2, 2));
theta_5_3_2 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_6[4] = theta_5_3_2*180/PI;
//θ5-4-1
temp_a = ((cos(theta_1_1)*cos(theta_2_4)*cos(theta_4_4_1) - sin(theta_1_1)*sin(theta_4_4_1))*noap_input(0 ,2)) + ((sin(theta_1_1)*cos(theta_2_4)*cos(theta_4_4_1) + cos(theta_1_1)*sin(theta_4_4_1))*noap_input(1, 2)) + ((-1*sin(theta_2_4)*cos(theta_4_4_1))*noap_input(2, 2));
temp_b = (cos(theta_1_1)*sin(theta_2_4)*noap_input(0, 2)) + (sin(theta_1_1)*sin(theta_2_4)*noap_input(1, 2)) + (cos(theta_2_4)*noap_input(2, 2));
theta_5_4_1 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_7[4] = theta_5_4_1*180/PI;
//θ5-4-2
temp_a = ((cos(theta_1_1)*cos(theta_2_4)*cos(theta_4_4_2) - sin(theta_1_1)*sin(theta_4_4_2))*noap_input(0 ,2)) + ((sin(theta_1_1)*cos(theta_2_4)*cos(theta_4_4_2) + cos(theta_1_1)*sin(theta_4_4_2))*noap_input(1, 2)) + ((-1*sin(theta_2_4)*cos(theta_4_4_2))*noap_input(2, 2));
temp_b = (cos(theta_1_1)*sin(theta_2_4)*noap_input(0, 2)) + (sin(theta_1_1)*sin(theta_2_4)*noap_input(1, 2)) + (cos(theta_2_4)*noap_input(2, 2));
theta_5_4_2 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_8[4] = theta_5_4_2*180/PI;
//θ6 -> eight solution
//θ6-1-1
temp_fr = -1*((cos(theta_1_2)*cos(theta_2_3)*sin(theta_4_1_1)) + (sin(theta_1_2)*cos(theta_4_1_1)));
temp_bk = -1*((sin(theta_1_2)*cos(theta_2_3)*sin(theta_4_1_1)) - (cos(theta_1_2)*cos(theta_4_1_1)));
temp_a = (temp_fr)*noap_input(0, 0) + (temp_bk)*noap_input(1, 0) + (sin(theta_2_3)*sin(theta_4_1_1))*noap_input(2, 0);
temp_b = (temp_fr)*noap_input(0, 1) + (temp_bk)*noap_input(1, 1) + (sin(theta_2_3)*sin(theta_4_1_1))*noap_input(2, 1);
theta_6_1_1 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_1[5] = theta_6_1_1*180/PI;
//θ6-1-2
temp_fr = (-1*(cos(theta_1_2)*cos(theta_2_3)*sin(theta_4_1_2))) - (sin(theta_1_2)*cos(theta_4_1_2));
temp_bk = (-1*(sin(theta_1_2)*cos(theta_2_3)*sin(theta_4_1_2))) + (cos(theta_1_2)*cos(theta_4_1_2));
temp_a = (temp_fr)*noap_input(0, 0) + (temp_bk)*noap_input(1, 0) + (sin(theta_2_3)*sin(theta_4_1_2))*noap_input(2, 0);
temp_b = (temp_fr)*noap_input(0, 1) + (temp_bk)*noap_input(1, 1) + (sin(theta_2_3)*sin(theta_4_1_2))*noap_input(2, 1);
theta_6_1_2 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_2[5] = theta_6_1_2*180/PI;
//θ6-2-1
temp_fr = (-1*(cos(theta_1_2)*cos(theta_2_2)*sin(theta_4_2_1))) - (sin(theta_1_2)*cos(theta_4_2_1));
temp_bk = (-1*(sin(theta_1_2)*cos(theta_2_2)*sin(theta_4_2_1))) + (cos(theta_1_2)*cos(theta_4_2_1));
temp_a = (temp_fr)*noap_input(0, 0) + (temp_bk)*noap_input(1, 0) + (sin(theta_2_2)*sin(theta_4_2_1))*noap_input(2, 0);
temp_b = (temp_fr)*noap_input(0, 1) + (temp_bk)*noap_input(1, 1) + (sin(theta_2_2)*sin(theta_4_2_1))*noap_input(2, 1);
theta_6_2_1 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_3[5] = theta_6_2_1*180/PI;
//θ6-2-2
temp_fr = (-1*(cos(theta_1_2)*cos(theta_2_2)*sin(theta_4_2_2))) - (sin(theta_1_2)*cos(theta_4_2_2));
temp_bk = (-1*(sin(theta_1_2)*cos(theta_2_2)*sin(theta_4_2_2))) + (cos(theta_1_2)*cos(theta_4_2_2));
temp_a = (temp_fr)*noap_input(0, 0) + (temp_bk)*noap_input(1, 0) + (sin(theta_2_2)*sin(theta_4_2_2))*noap_input(2, 0);
temp_b = (temp_fr)*noap_input(0, 1) + (temp_bk)*noap_input(1, 1) + (sin(theta_2_2)*sin(theta_4_2_2))*noap_input(2, 1);
theta_6_2_2 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_4[5] = theta_6_2_2*180/PI;
//θ6-3-1
temp_fr = (-1*(cos(theta_1_1)*cos(theta_2_1)*sin(theta_4_3_1))) - (sin(theta_1_1)*cos(theta_4_3_1));
temp_bk = (-1*(sin(theta_1_1)*cos(theta_2_1)*sin(theta_4_3_1))) + (cos(theta_1_1)*cos(theta_4_3_1));
temp_a = (temp_fr)*noap_input(0, 0) + (temp_bk)*noap_input(1, 0) + (sin(theta_2_1)*sin(theta_4_3_1))*noap_input(2, 0);
temp_b = (temp_fr)*noap_input(0, 1) + (temp_bk)*noap_input(1, 1) + (sin(theta_2_1)*sin(theta_4_3_1))*noap_input(2, 1);
theta_6_3_1 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_5[5] = theta_6_3_1*180/PI;
//θ6-3-2
temp_fr = (-1*(cos(theta_1_1)*cos(theta_2_1)*sin(theta_4_3_2))) - (sin(theta_1_1)*cos(theta_4_3_2));
temp_bk = (-1*(sin(theta_1_1)*cos(theta_2_1)*sin(theta_4_3_2))) + (cos(theta_1_1)*cos(theta_4_3_2));
temp_a = (temp_fr)*noap_input(0, 0) + (temp_bk)*noap_input(1, 0) + (sin(theta_2_1)*sin(theta_4_3_2))*noap_input(2, 0);
temp_b = (temp_fr)*noap_input(0, 1) + (temp_bk)*noap_input(1, 1) + (sin(theta_2_1)*sin(theta_4_3_2))*noap_input(2, 1);
theta_6_3_2 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_6[5] = theta_6_3_2*180/PI;
//θ6-4-1
temp_fr = (-1*(cos(theta_1_1)*cos(theta_2_4)*sin(theta_4_4_1))) - (sin(theta_1_1)*cos(theta_4_4_1));
temp_bk = (-1*(sin(theta_1_1)*cos(theta_2_4)*sin(theta_4_4_1))) + (cos(theta_1_1)*cos(theta_4_4_1));
temp_a = (temp_fr)*noap_input(0, 0) + (temp_bk)*noap_input(1, 0) + (sin(theta_2_4)*sin(theta_4_4_1))*noap_input(2, 0);
temp_b = (temp_fr)*noap_input(0, 1) + (temp_bk)*noap_input(1, 1) + (sin(theta_2_4)*sin(theta_4_4_1))*noap_input(2, 1);
theta_6_4_1 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_7[5] = theta_6_4_1*180/PI;
//θ6-4-1
temp_fr = (-1*(cos(theta_1_1)*cos(theta_2_4)*sin(theta_4_4_2))) - (sin(theta_1_1)*cos(theta_4_4_2));
temp_bk = (-1*(sin(theta_1_1)*cos(theta_2_4)*sin(theta_4_4_2))) + (cos(theta_1_1)*cos(theta_4_4_2));
temp_a = (temp_fr)*noap_input(0, 0) + (temp_bk)*noap_input(1, 0) + (sin(theta_2_4)*sin(theta_4_4_2))*noap_input(2, 0);
temp_b = (temp_fr)*noap_input(0, 1) + (temp_bk)*noap_input(1, 1) + (sin(theta_2_4)*sin(theta_4_4_2))*noap_input(2, 1);
theta_6_4_2 = atan2(temp_a, temp_b);
JOINT_VARIABLE_SOLUTION_8[5] = theta_6_4_2*180/PI;
}
//this function handles for showing the answer calculated by inverse kinematics
//this function using global matrix & determine whether the angle limit is met
void output_check(double JOINT_VARIABLE_SOLUTION[6]){
cout<<"Corresponding variables (θ1, θ2, d3, θ4, θ5, θ6): "<= 160 || JOINT_VARIABLE_SOLUTION[0] <= -160){
cout<<"[error] θ1 is out of range"<= 125 || JOINT_VARIABLE_SOLUTION[1] <= -125){
cout<<"[error] θ2 is out of range"<= 30 || JOINT_VARIABLE_SOLUTION[2] <= -30){
cout<<"[error] d3 is out of range"<= 140 || JOINT_VARIABLE_SOLUTION[3] <= -140){
cout<<"[error] θ4 is out of range"<= 100 || JOINT_VARIABLE_SOLUTION[4] <= -100){
cout<<"[error] θ5 is out of range"<= 260 || JOINT_VARIABLE_SOLUTION[0] <= -260){
cout<<"[error] θ6 is out of range"<