【算法基础学习 1】贝叶斯滤波
(一). 概率基础回顾
我们先来回顾一下概率论里的基本知识:
1. X: 表示一个随机变量,如果它有有限个可能的取值{x1,x2,⋯,xn}
2. p(X=xi):表示变量X的值为 xi的概率。
3. p(⋅):称为概率质量函数(probability mass function).
例如:一个家里有3个房间,机器人在各个房间的概率为 p(room)={0.1,0.3,0.6}.
4. 如果X在连续空间取值,p(x)称为概率密度函数(probability density function),
p(x∈(a,b))=![]()
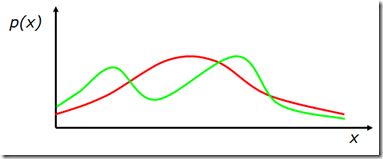
图1. 概率密度函数曲线示例
5. 联合概率:p(X=x and Y=y)=p(x,y),称为联合概率密度分布。如果X和Y是相互独立的随机变量,p(x,y)=p(x)p(y)。
6. 条件概率:p(X=x|Y=y)是在已知Y=y的条件下,计算X=x的概率。
p(x|y)=p(x,y)/p(y)
p(x,y)=p(x|y)p(y)=p(y|x)p(x)
如果x和y相互独立,则:
p(x|y)=p(x)
7. 全概率公式:
离散情况下:

连续情况下:

(二). 贝叶斯公式
2.1 贝叶斯公式
基于条件概率公式和全概率公式,我们可以导出贝叶斯公式:

- 这里面x一般是某种状态;y一般是代表某种观测。
- 我们称P(y|x)为causal knowledge,意即由x的已知情况,就可以推算y发生的概率,例如在图2的例子中,已知如果门开着,则z=0.5m的概率为0.6;如果门关着,则z=0.5m的概率为0.3。
- 我们称P(x)为prior knowledge,是对x的概率的先验知识。例如在图2的例子中,可设门开或关的概率各占50%
- P(x|y)是基于观测对状态的诊断或推断。贝叶斯公式的本质就是利用causal knowledge和prior knowledge来进行状态推断或推理。
例1: :
:
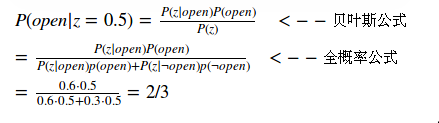
在图2所示的例子中,机器人根据观测的到门的距离,估算门开或关的概率,若测量到门的距离为z=0.5m,则可用条件概率描述门开着的概率:
P(open|z=0.6)=?
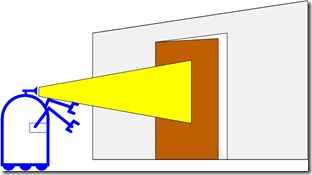
图 2.机器人根据观测计算门开或关的概率
2.2 贝叶斯公式的计算
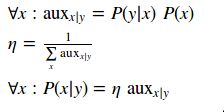
可以看到贝叶斯公式的分母项P(y),同P(x|y)无关,所以可以把它作为归一化系数看待:

所以基于causal knowledge和prior knowledge进行条件概率计算的过程如下:
Algorithm:
2.3 贝叶斯公式中融合多种观测
在很多应用问题中,我们会用多种观测信息对一个状态进行猜测和推理,贝叶斯公式中是如何融合多种观测的呢?
我们简单推导一下:

所以有:

2.4 贝叶斯递推公式
由此,我们来推导贝叶斯滤波的递推公式:
P(x|z1,…,zn)=?
我们把zn看做y,把z1,…,zn−1看做z,代入上面的公式:

再由Markov属性,在x已知的情况下,zn同{z1,…,zn–1}无关,所以:
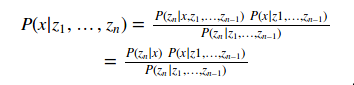
从而我们得到贝叶斯的递推公式:

例2:在例1的基础上,如果机器人第二次测量到门的距离仍然为0.5米, 计算门开着的概率。

所以,第二次z=0.5m的观测增大了对门开着的概率的置信程度。
(三). 如何融入动作?
在实际问题中,对象总是处在一个动态变化的环境中,例如:
- 机器人自身的动作影响了环境状态
- 其它对象,比如人的动作影响了环境状态
- 或者就是简单的环境状态随着时间发生了变化。
如何在Bayes模型中来描述动作的影响呢?
- 首先,动作所带来的影响也总是具有不确定性的
- 其次,相比于观测,动作一般会使得对象的状态更为模糊(或更不确定)。
我们用u来描述动作,在x′状态下,执行了动作u之后,对象状态改变为x的概率表述为:
P(x|u,x′)
动作对状态的影响一般由状态转移模型来描述。如图3所示,表示了“关门”这个动作对状态影响的转移模型。这个状态转移模型表示:关门这个动作有0.1的失败概率,所以当门是open状态时,执行“关门”动作,门有0.9的概率转为closed状态,有0.1的概率保持在open状态。门是closed的状态下,执行“关门”动作,门仍然是关着的。
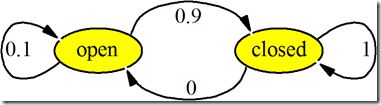
图3. “关门”动作的状态转移模型
执行某一动作后,计算动作后的状态概率,需要考虑动作之前的各种状态情况,把所有情况用全概率公式计算:
- 连续情况下:

- 离散情况下:
![]()
例3:在例2的基础上,如果按照图3所示的状态转移关系,机器人执行了一次关门动作, 计算动作后门开着的概率?

所以,执行一次关门动作后,门开着的概率变为了0.08.
(四). 贝叶斯滤波算法
4.1 算法设定
由上述推导和示例,我们可以给出贝叶斯滤波的算法,算法的输入输出设定如下。
- 1.系统输入
- 1到t时刻的状态观测和动作:dt={u1,z1…,ut,zt}
- 观测模型:P(z|x)
- 动作的状态转移模型:P(x|u,x′)
- 系统状态的先验概率分布P(x)
- 2.期望输出
- 计算状态的后延概率,称为状态的置信概率:

- 计算状态的后延概率,称为状态的置信概率:
4.2 算法基本假设
贝叶斯滤波的基本假设:
1. Markov性假设: t时刻的状态由t−1时刻的状态和t时刻的动作决定。t时刻的观测仅同t时刻的状态相关,如图4所示:
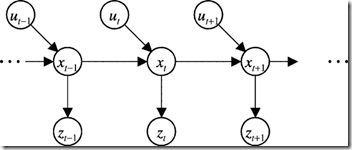
图4. Markov模型

2. 静态环境,即对象周边的环境假设是不变的
3. 观测噪声、模型噪声等是相互独立的
4.3 Bayes滤波算法
基于上述设定和假设,我们给出贝叶斯滤波算法的推导过程:
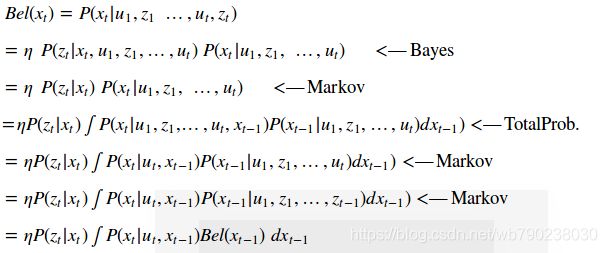
其中第一步采用贝叶斯公式展开,第二步使用Markov性质(zt仅由xt决定);第三步使用全概率公式对xt−1进行展开;第四步继续使用Markov性质(xt仅由xt−1和ut决定);第五步继续使用Markov性质,因为xt−1同ut无关,最终得到Bel(xt)的递推公式。
可见递推公式中分为两个步骤,![]() 部分是基于xt−1,ut预测xt的状态;ηP(zt|xt)部分是基于观测zt更新状态xt.
部分是基于xt−1,ut预测xt的状态;ηP(zt|xt)部分是基于观测zt更新状态xt.
4.3 Bayes滤波算法流程
所以,Bayes滤波的算法流程图如图5所示。如果d是观测,则进行一次状态更新,如果d是动作,则进行一次状态预测。
![IKPS48MP]LSAG515A3`L9KB](http://img.e-com-net.com/image/info8/94082059ae7c474c81d55ae783fdcd56.jpg)
图5. Bayes滤波的算法流程
我们看到,在进行状态预测时,需要对所有可能的x′状态进行遍历,使得基本的Bayes模型在计算上成本是较高的。
4.3 Bayes滤波算法的应用
Bayes滤波方法是很多实用算法的基础,例如:
- Kalman滤波
- 扩展Kalman滤波
- 信息滤波
- 粒子滤波
等,我们在下一节介绍Kalman滤波。
参考:
http://www.cnblogs.com/ycwang16/p/5995702.html
https://blog.csdn.net/sonictl/article/details/8787106