ros下超声波避障仿真
一、添加超声波仿真模型
1.在文件夹下创建 ultrasonic.xacro 文件,在文件内添加以下代码:
0 0 0 0 0 0
true
10
8
1
-0.14
0.14
8
1
-0.14
0.14
0.05
3
0.1
0.01
true
0.1
ultrasonic_sensor
ultrasonic_sensor
ultrasound
2、在机器人配置文件(urdf)中添加以下代码:
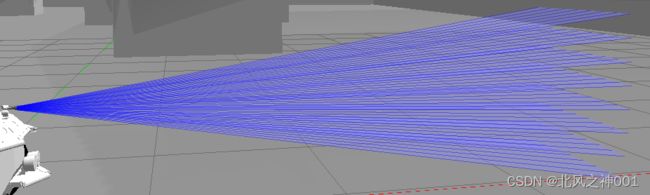
3、运行机器人模型,效果如下:
gazebo下效果:
运行 rostopic list 可以查看已经发布了超声波话题:
![]()
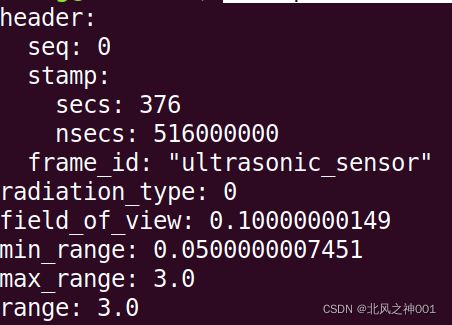
运行 rostopic echo /ultrasonic_sensor 可以查看超声波传回来的数据:
二、ros超声波避障仿真实验
本次实验中仅使用了一个超声波,安装在机器人正前方。
1、创建一个catkin_ws/src,然后
catkin_create_pkg ultrasonic_obstacle_avoidance roscpp sensor_msgs geometry_msgs
cd ultrasonic_obstacle_avoidance/src
touch main.cpp
cd ../../..
catkin_make
2、打开main.cpp,输入如下代码:
#include "ros/ros.h"
#include "sensor_msgs/Range.h"
#include "geometry_msgs/Twist.h"
#define STATUS_A 0x01 //距离小于min_range,停止
//global variable
geometry_msgs::Twist twist_cmd;
ros::Publisher twist_pub;
const double warn_range = 1.5;
double range_array[1];
//double range_array[3]; //save three sonar value
uint8_t flag = 0x00;
double default_period_hz = 10;
double default_linear_x = 0.5; // (m/s)
double V_Angle = 0.0;
void ultrasonic_sensor_callback(const sensor_msgs::Range::ConstPtr& msg)
{
range_array[0] = msg->range;
ROS_INFO("range:[%f]", msg->range);
}
void publishTwistCmd(double linear_x, double angular_z)
{
twist_cmd.linear.x = linear_x;
twist_cmd.linear.y = 0.0;
twist_cmd.linear.z = 0.0;
twist_cmd.angular.x = 0.0;
twist_cmd.angular.y = 0.0;
twist_cmd.angular.z = angular_z;
twist_pub.publish(twist_cmd);
}
void checkSonarRange(double ultrasonic_sensor)
{
unsigned char flag = 0;
if( ultrasonic_sensor <= warn_range ) //距离 < warn_range 停车
{
flag = 0x01;
publishTwistCmd(0.0 , 0.0);
}
else
{
publishTwistCmd(default_linear_x, V_Angle);
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "ultrasonic_obstacle_avoidance_node");
ros::NodeHandle handle;
ros::Rate loop_rate = default_period_hz;
ros::Subscriber sub_ultrasonic_sensor = handle.subscribe("/ultrasonic_sensor", 100, ultrasonic_sensor_callback);
twist_pub = handle.advertise("/cmd_vel", 10);
while(ros::ok())
{
checkSonarRange(range_array[0]);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
} 3、修改CMakeLists.txt配置文件,按照如下图所示修改:
cmake_minimum_required(VERSION 3.0.2)
project(ultrasonic_obstacle_avoidance)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
sensor_msgs
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# geometry_msgs# sensor_msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES ultrasonic_obstacle_avoidance
# CATKIN_DEPENDS geometry_msgs roscpp sensor_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/ultrasonic_obstacle_avoidance.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
add_executable(${PROJECT_NAME}_node src/main.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_ultrasonic_obstacle_avoidance.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
)4、修改package.xml文件,按照如下图所示修改:
ultrasonic_obstacle_avoidance
0.0.0
The ultrasonic_obstacle_avoidance package
liang
TODO
catkin
geometry_msgs
roscpp
sensor_msgs
geometry_msgs
roscpp
sensor_msgs
roscpp
sensor_msgs
geometry_msgs
sensor_msgs
geometry_msgs
roscpp
sensor_msgs
5、接下来重新编译:
cd catkin_ws
catkin_make
source devel/setup.bash6、编译完成后就可以来运行查看效果了,首先运行机器人模型和gazebo仿真软件,然后在启动打印超声波数据的节点:
rosrun ultrasonic_obstacle_avoidance ultrasonic_obstacle_avoidance_node运行后可以看到机器人距离障碍物1.5米处停下。