闭包在循环事件绑定中的应用场景描述:在页面上有3个button按钮,当点击每个按钮时输出当前按钮的索引值,要求用循环来绑定每个按钮的事件,看下面的代码。button1button2button3varbuttons=document.querySelectorAll('button');for(vari=0;i
刷题前必学!二叉树!用JavaScript学数据结构与算法
JavaScript算法与数据结构-HowieCong务必要熟悉JavaScript使用再来学!一、树是什么?数据结构中的树,对于现实世界中的树简化——树根抽象为“根节点”,树枝抽象为“边”,树枝的两个端点抽象为“结点”,树叶抽象为“叶子结点”计算机中的树如下:二、树的重点树的层次计算规则:根结点所在的那一层为第一层,其子节点为第二层,以此类推结点和树的高度计算规则:叶子结点高度为1,每向上一层
MySQL进阶—— 视图(详解)
1加1等于
MySQLsqlmysql
本文全面介绍Mysql视图相关的核心知识。包括介绍视图定义,基于查询结果的虚拟表,有简化查询、保障安全、解耦逻辑等作用。讲解创建、修改、删除视图的操作,以及及视图可更新条件、安全性控制及性能优化方法。本文目录一、视图的定义与作用定义作用二、视图的创建与管理创建视图修改视图方式1:覆盖原有视图方式2:ALTERVIEW删除视图三、视图两种算法MERGE(默认)TEMPTABLE四、视图的可更新性可更
Python通过YOLO格式TXT标签文件在图像中画框
CHERISH_KDX
pythonYOLO人工智能
使用场景检测数据集标注是否有误:在目标检测算法中需要标注自己的数据集,为了更加方便的检查数据集标注是否有误,可以使用该工具将标注结果绘制在图像中并查看。美化识别结果中的检测框:在一些目标检测场景中,YOLO检测算法原始的检测框绘制会导致重叠、颜色冲突、字体过大等问题。可以使用该工具进行修改。代码importosimportcv2classcheck_label:def__init__(self,c
C#零基础入门篇(13.List<T>的基本特性)
think__deeply
c#list开发语言visualstudio
在C#中,`List`是一个非常常用且功能强大的泛型集合类,属于`System.Collections.Generic`命名空间。它提供了动态数组的功能,允许开发者存储、管理和操作一组相同类型的元素。以下是关于`List`的详细讲解,包括其特性、常用方法和使用场景。---###1.**`List`的基本特性**-**泛型集合**:`List`是一个泛型类,使用类型参数`T`来指定存储的元素类型。这
基于llama_cpp 调用本地模型(llama)实现基本推理
月光技术杂谈
大模型初探llamallama.cpppythonLLM集成显卡本地模型AI
零基础实践本地推理模型基本应用:基于llama_cpp的本地模型调用。本文先安装llama_cpppython库,再编写程序,利用其调用llama-2-7b-chat.Q4_K_M.ggu模型。背景llama_cpp是一个基于C++的高性能库(llama.cpp)的Python绑定,支持在CPU或GPU上高效运行LLaMA及其衍生模型(如LLaMA2),并通过量化技术(如GGUF格式)优化内存使用
VS2017拉取Gitlab上项目
daboluo@Niko
gitlab项目管理git
VS2017拉取Gitlab上项目简介一、需要准备的资源二、操作步骤简介最近的项目在Gitlab上,网上找了发现没有解决问题,于是自己熟悉了下。记录一下从gitlab仓库git到vs2017的过程。一、需要准备的资源安装好VisualStudio2017(其他版本也可以,操作可能会不太一样)。管理员为你创建的GitLab账号、密码。GitLab账号权限可以查看的项目。二、操作步骤可以先用web登录
机器学习之KMeans算法
Mr终游
机器学习机器学习算法kmeans
目录一、KMeans的核心思想二、KMeans算法流程三、KMeans的关键点1.优点:2.缺点:四、如何确定最佳k值1.肘部法则2.轮廓系数五、Kmeans的典型应用场景六、代码示例KMeans是一种广泛使用的无监督学习算法,主要用于聚类分析(Clustering)。它的目标是将数据集划分为K个互不重叠的子集(簇,Cluster),使得同一簇内的数据点尽可能相似,不同簇之间的数据点尽可能差异显著
《C#多播委托:深入解析核心机制与实战应用指南》
Ro小陌
C#WindowsJavac#windowsjava
在C#中,多播委托(MulticastDelegate)是一种可以引用多个方法的委托类型,它允许将多个方法绑定到同一个委托实例上,并通过一次调用触发所有方法的执行。这是事件处理机制的核心实现基础。以下从底层机制到实际应用详细解析:一、委托基础委托的本质委托是类型安全的函数指针,继承自System.MulticastDelegate类。每个委托实例内部维护一个调用列表(InvocationList)
全面掌握C#多线程编程:核心机制、高级技巧与性能调优
Ro小陌
C#Java开发语言c#java开发语言
在C#中,多线程编程的深度解析需要从底层机制、运行时行为、同步原语和最佳实践等多个维度展开。以下是更深入的技术解析:一、线程与操作系统内核的交互1.线程的底层实现用户模式线程(User-ModeThreads):由CLR管理,轻量级但无法利用多核,依赖协作式调度(如async/await中的状态机)。内核模式线程(Kernel-ModeThreads):由操作系统调度,支持抢占式多任务,每个C#T
太翌氏文化产业: AGI架构部署
太翌修仙笔录
deepseek第三代人工智能agi架构人工智能
在之前RGOA-重力算法等基础上,分析春秋历日盘排盘驱动行为的ai模式,是否达到AGI标准春秋历日盘排盘驱动行为的AI模式与AGI标准的对比分析一、RGOA-重力算法与春秋历日盘排盘的核心逻辑RGOA算法原理RGOA(GravitationalSearchAlgorithm)是一种基于物理引力定律的优化算法,通过模拟粒子在引力场中的运动来寻找最优解。其核心公式为:Fij=GmimjRij2+ϵ和a
2025-01-22 Unity Editor 1 —— MenuItem 入门
蔗理苦
UnityEditor学习unity游戏引擎guiimguiunityeditor
文章目录1Editor文件夹2MenuItem3使用示例3.1打开网址3.2打开文件夹3.3MenuToggle3.4Menu代码复用3.5MenuItem激活与失活4代码示例1Editor文件夹Editor文件夹是Unity中的特殊文件夹,Unity中所有编辑器相关的脚本都需要放置在其中,其相关的命名空间为UnityEditor。使用命名空间UnityEditor的脚本最终不能被Unity打包,
Unity数据持久化之PlayerPrefs
FAREWELL00075
unity游戏引擎c#
一、什么是数据持久化大家都玩过游戏吧,大家玩完游戏之后肯定希望自己的游戏数据得以保存。那么就需要用到数据持久化,数据并不仅仅只是在内存中,更要存储在硬盘上,才能保证游戏数据不丢失。在Unity中,数据持久化是指在游戏运行结束后,某些数据(如玩家的游戏进度、设置、或统计信息)能够被保存下来,并在下次启动游戏时仍然可用。数据持久化是游戏开发中的常见需求,用于确保玩家的游戏体验不会因为退出游戏而丢失重要
vue中为组建添加样式的方式
晨枫阳
javascript前端
在Vue中,可以通过多种方式为view添加样式,并且支持动态绑定样式。以下是几种常见的方式:1.内联样式直接在模板中使用style属性来添加样式。这是一个内联样式的示例2.使用:style动态绑定样式可以通过:style动态绑定样式对象或数组。2.1绑定样式对象这是一个动态绑定样式对象的示例exportdefault{data(){return{styleObject:{color:'red',f
聚类分析|k-means聚类方法及其Python实现
皖山文武
数据挖掘商务智能kmeans聚类python数据挖掘机器学习
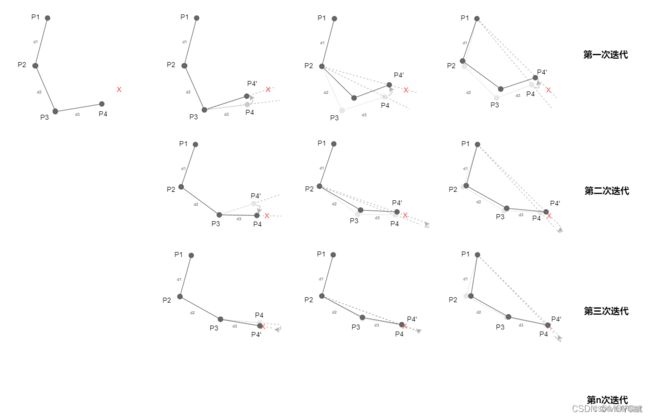
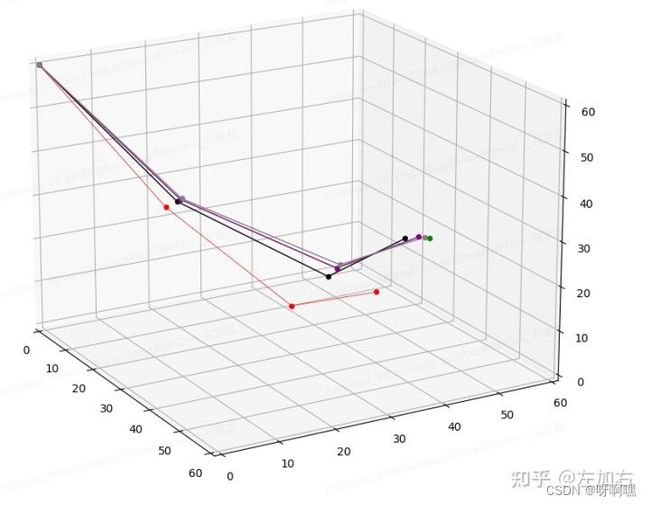
k-means聚类方法及其Python实现0.k-means算法简介1.k-means算法工作原理2.k-means算法流程3.k–means算法的Python实现0.k-means算法简介k-means算法由MacQueen在1967年提出。是一种经典的基于划分的聚类方法。划分方法(PartitioningMethod)是基于距离判断样本相似度,通过不断迭代将含有多个样本的数据集划分成若干个簇,
LangChain 发布政策详解
VYSAHF
langchain人工智能深度学习python
技术背景介绍LangChain是一个用于构建和部署大型语言模型(LLM)应用的生态系统。它由多个组件包组成,例如langchain-core、langchain、langchain-community、langgraph和langserve等。随着应用需求的快速变化,LangChain的开发与发布策略也相应调整,以便更好地服务于用户社区。核心原理解析LangChain生态系统采用语义版本控制(Se
【实战ES】实战 Elasticsearch:快速上手与深度实践-6.2.2GDPR数据脱敏处理
言析数智
实战elasticsearch大数据搜索引擎
点击关注不迷路点击关注不迷路点击关注不迷路文章大纲6.2.2GDPR数据脱敏处理深度实践指南1.GDPR核心要求映射1.1关键条款与技术要求1.2`数据类型与脱敏策略`2.全链路脱敏配置2.1`动态脱敏管道`2.2静态脱敏模板3.`脱敏算法性能对比`3.1算法性能矩阵3.2存储成本分析4.企业级合规方案4.1金融行业案例4.2医疗行业方案5.合规性验证方案5.1自动化检查脚本5.2审计检查清单6.
Unity游戏引擎
喜欢星期五
游戏引擎unity
在数字创意的世界里,Unity引擎以其强大的功能和灵活性,已经成为无数开发者心中构建梦想游戏的首选工具。今天,我们就来深入探讨Unity的奥秘,解锁它如何帮助我们实现那些令人惊叹的游戏项目。unity博文的概要:1.入门教程和资源分享初学者指南:这类博文为刚接触Unity的新手提供入门指导,介绍Unity界面布局、基本操作和简单的游戏开发流程。资源推荐:分享对开发者非常有帮助的Unity插件、模型
JAVA基础
灵静志远
位运算加载Date字符串池覆盖
一、类的初始化顺序
1 (静态变量,静态代码块)-->(变量,初始化块)--> 构造器
同一括号里的,根据它们在程序中的顺序来决定。上面所述是同一类中。如果是继承的情况,那就在父类到子类交替初始化。
二、String
1 String a = "abc";
JAVA虚拟机首先在字符串池中查找是否已经存在了值为"abc"的对象,根
keepalived实现redis主从高可用
bylijinnan
redis
方案说明
两台机器(称为A和B),以统一的VIP对外提供服务
1.正常情况下,A和B都启动,B会把A的数据同步过来(B is slave of A)
2.当A挂了后,VIP漂移到B;B的keepalived 通知redis 执行:slaveof no one,由B提供服务
3.当A起来后,VIP不切换,仍在B上面;而A的keepalived 通知redis 执行slaveof B,开始
java文件操作大全
0624chenhong
java
最近在博客园看到一篇比较全面的文件操作文章,转过来留着。
http://www.cnblogs.com/zhuocheng/archive/2011/12/12/2285290.html
转自http://blog.sina.com.cn/s/blog_4a9f789a0100ik3p.html
一.获得控制台用户输入的信息
&nbs
android学习任务
不懂事的小屁孩
工作
任务
完成情况 搞清楚带箭头的pupupwindows和不带的使用 已完成 熟练使用pupupwindows和alertdialog,并搞清楚两者的区别 已完成 熟练使用android的线程handler,并敲示例代码 进行中 了解游戏2048的流程,并完成其代码工作 进行中-差几个actionbar 研究一下android的动画效果,写一个实例 已完成 复习fragem
zoom.js
换个号韩国红果果
oom
它的基于bootstrap 的
https://raw.github.com/twbs/bootstrap/master/js/transition.js transition.js模块引用顺序
<link rel="stylesheet" href="style/zoom.css">
<script src=&q
详解Oracle云操作系统Solaris 11.2
蓝儿唯美
Solaris
当Oracle发布Solaris 11时,它将自己的操作系统称为第一个面向云的操作系统。Oracle在发布Solaris 11.2时继续它以云为中心的基调。但是,这些说法没有告诉我们为什么Solaris是配得上云的。幸好,我们不需要等太久。Solaris11.2有4个重要的技术可以在一个有效的云实现中发挥重要作用:OpenStack、内核域、统一存档(UA)和弹性虚拟交换(EVS)。
spring学习——springmvc(一)
a-john
springMVC
Spring MVC基于模型-视图-控制器(Model-View-Controller,MVC)实现,能够帮助我们构建像Spring框架那样灵活和松耦合的Web应用程序。
1,跟踪Spring MVC的请求
请求的第一站是Spring的DispatcherServlet。与大多数基于Java的Web框架一样,Spring MVC所有的请求都会通过一个前端控制器Servlet。前
hdu4342 History repeat itself-------多校联合五
aijuans
数论
水题就不多说什么了。
#include<iostream>#include<cstdlib>#include<stdio.h>#define ll __int64using namespace std;int main(){ int t; ll n; scanf("%d",&t); while(t--)
EJB和javabean的区别
asia007
beanejb
EJB不是一般的JavaBean,EJB是企业级JavaBean,EJB一共分为3种,实体Bean,消息Bean,会话Bean,书写EJB是需要遵循一定的规范的,具体规范你可以参考相关的资料.另外,要运行EJB,你需要相应的EJB容器,比如Weblogic,Jboss等,而JavaBean不需要,只需要安装Tomcat就可以了
1.EJB用于服务端应用开发, 而JavaBeans
Struts的action和Result总结
百合不是茶
strutsAction配置Result配置
一:Action的配置详解:
下面是一个Struts中一个空的Struts.xml的配置文件
<?xml version="1.0" encoding="UTF-8" ?>
<!DOCTYPE struts PUBLIC
&quo
如何带好自已的团队
bijian1013
项目管理团队管理团队
在网上看到博客"
怎么才能让团队成员好好干活"的评论,觉得写的比较好。 原文如下: 我做团队管理有几年了吧,我和你分享一下我认为带好团队的几点:
1.诚信
对团队内成员,无论是技术研究、交流、问题探讨,要尽可能的保持一种诚信的态度,用心去做好,你的团队会感觉得到。 2.努力提
Java代码混淆工具
sunjing
ProGuard
Open Source Obfuscators
ProGuard
http://java-source.net/open-source/obfuscators/proguardProGuard is a free Java class file shrinker and obfuscator. It can detect and remove unused classes, fields, m
【Redis三】基于Redis sentinel的自动failover主从复制
bit1129
redis
在第二篇中使用2.8.17搭建了主从复制,但是它存在Master单点问题,为了解决这个问题,Redis从2.6开始引入sentinel,用于监控和管理Redis的主从复制环境,进行自动failover,即Master挂了后,sentinel自动从从服务器选出一个Master使主从复制集群仍然可以工作,如果Master醒来再次加入集群,只能以从服务器的形式工作。
什么是Sentine
使用代理实现Hibernate Dao层自动事务
白糖_
DAOspringAOP框架Hibernate
都说spring利用AOP实现自动事务处理机制非常好,但在只有hibernate这个框架情况下,我们开启session、管理事务就往往很麻烦。
public void save(Object obj){
Session session = this.getSession();
Transaction tran = session.beginTransaction();
try
maven3实战读书笔记
braveCS
maven3
Maven简介
是什么?
Is a software project management and comprehension tool.项目管理工具
是基于POM概念(工程对象模型)
[设计重复、编码重复、文档重复、构建重复,maven最大化消除了构建的重复]
[与XP:简单、交流与反馈;测试驱动开发、十分钟构建、持续集成、富有信息的工作区]
功能:
编程之美-子数组的最大乘积
bylijinnan
编程之美
public class MaxProduct {
/**
* 编程之美 子数组的最大乘积
* 题目: 给定一个长度为N的整数数组,只允许使用乘法,不能用除法,计算任意N-1个数的组合中乘积中最大的一组,并写出算法的时间复杂度。
* 以下程序对应书上两种方法,求得“乘积中最大的一组”的乘积——都是有溢出的可能的。
* 但按题目的意思,是要求得这个子数组,而不
读书笔记-2
chengxuyuancsdn
读书笔记
1、反射
2、oracle年-月-日 时-分-秒
3、oracle创建有参、无参函数
4、oracle行转列
5、Struts2拦截器
6、Filter过滤器(web.xml)
1、反射
(1)检查类的结构
在java.lang.reflect包里有3个类Field,Method,Constructor分别用于描述类的域、方法和构造器。
2、oracle年月日时分秒
s
[求学与房地产]慎重选择IT培训学校
comsci
it
关于培训学校的教学和教师的问题,我们就不讨论了,我主要关心的是这个问题
培训学校的教学楼和宿舍的环境和稳定性问题
我们大家都知道,房子是一个比较昂贵的东西,特别是那种能够当教室的房子...
&nb
RMAN配置中通道(CHANNEL)相关参数 PARALLELISM 、FILESPERSET的关系
daizj
oraclermanfilespersetPARALLELISM
RMAN配置中通道(CHANNEL)相关参数 PARALLELISM 、FILESPERSET的关系 转
PARALLELISM ---
我们还可以通过parallelism参数来指定同时"自动"创建多少个通道:
RMAN > configure device type disk parallelism 3 ;
表示启动三个通道,可以加快备份恢复的速度。
简单排序:冒泡排序
dieslrae
冒泡排序
public void bubbleSort(int[] array){
for(int i=1;i<array.length;i++){
for(int k=0;k<array.length-i;k++){
if(array[k] > array[k+1]){
初二上学期难记单词三
dcj3sjt126com
sciet
concert 音乐会
tonight 今晚
famous 有名的;著名的
song 歌曲
thousand 千
accident 事故;灾难
careless 粗心的,大意的
break 折断;断裂;破碎
heart 心(脏)
happen 偶尔发生,碰巧
tourist 旅游者;观光者
science (自然)科学
marry 结婚
subject 题目;
I.安装Memcahce 1. 安装依赖包libevent Memcache需要安装libevent,所以安装前可能需要执行 Shell代码 收藏代码
dcj3sjt126com
redis
wget http://download.redis.io/redis-stable.tar.gz
tar xvzf redis-stable.tar.gz
cd redis-stable
make
前面3步应该没有问题,主要的问题是执行make的时候,出现了异常。
异常一:
make[2]: cc: Command not found
异常原因:没有安装g
并发容器
shuizhaosi888
并发容器
通过并发容器来改善同步容器的性能,同步容器将所有对容器状态的访问都串行化,来实现线程安全,这种方式严重降低并发性,当多个线程访问时,吞吐量严重降低。
并发容器ConcurrentHashMap
替代同步基于散列的Map,通过Lock控制。
&nb
Spring Security(12)——Remember-Me功能
234390216
Spring SecurityRemember Me记住我
Remember-Me功能
目录
1.1 概述
1.2 基于简单加密token的方法
1.3 基于持久化token的方法
1.4 Remember-Me相关接口和实现
位运算
焦志广
位运算
一、位运算符C语言提供了六种位运算符:
& 按位与
| 按位或
^ 按位异或
~ 取反
<< 左移
>> 右移
1. 按位与运算 按位与运算符"&"是双目运算符。其功能是参与运算的两数各对应的二进位相与。只有对应的两个二进位均为1时,结果位才为1 ,否则为0。参与运算的数以补码方式出现。
例如:9&am
nodejs 数据库连接 mongodb mysql
liguangsong
mongodbmysqlnode数据库连接
1.mysql 连接
package.json中dependencies加入
"mysql":"~2.7.0"
执行 npm install
在config 下创建文件 database.js
java动态编译
olive6615
javaHotSpotjvm动态编译
在HotSpot虚拟机中,有两个技术是至关重要的,即动态编译(Dynamic compilation)和Profiling。
HotSpot是如何动态编译Javad的bytecode呢?Java bytecode是以解释方式被load到虚拟机的。HotSpot里有一个运行监视器,即Profile Monitor,专门监视
Storm0.9.5的集群部署配置优化
roadrunners
优化storm.yaml
nimbus结点配置(storm.yaml)信息:
# Licensed to the Apache Software Foundation (ASF) under one
# or more contributor license agreements. See the NOTICE file
# distributed with this work for additional inf
101个MySQL 的调节和优化的提示
tomcat_oracle
mysql
1. 拥有足够的物理内存来把整个InnoDB文件加载到内存中——在内存中访问文件时的速度要比在硬盘中访问时快的多。 2. 不惜一切代价避免使用Swap交换分区 – 交换时是从硬盘读取的,它的速度很慢。 3. 使用电池供电的RAM(注:RAM即随机存储器)。 4. 使用高级的RAID(注:Redundant Arrays of Inexpensive Disks,即磁盘阵列
zoj 3829 Known Notation(贪心)
阿尔萨斯
ZOJ
题目链接:zoj 3829 Known Notation
题目大意:给定一个不完整的后缀表达式,要求有2种不同操作,用尽量少的操作使得表达式完整。
解题思路:贪心,数字的个数要要保证比∗的个数多1,不够的话优先补在开头是最优的。然后遍历一遍字符串,碰到数字+1,碰到∗-1,保证数字的个数大于等1,如果不够减的话,可以和最后面的一个数字交换位置(用栈维护十分方便),因为添加和交换代价都是1