OpenCVSharp 相机棋盘格校正
用 OpenCVSharp 4.5 跑一遍 OpenCV 官方教程。
原 OpenCV 官方教程链接:OpenCV: Camera calibration With OpenCV
这个教程的程序源码比较复杂,这里简化一下以集中精力在核心的校正部分:只限于用棋盘格图片校正,本来就少量几个参数直接写进程序里,免去xml文件读写的麻烦。
using System;
using OpenCvSharp;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Collections.Generic;
namespace ConsoleApp1
{
class tutorial58 : ITutorial
{
static int BoardSize_Width = 9; //宽度和高度是指内部交叉点的个数,而不是方形格的个数
static int BoardSize_Height = 6;
static Size BoardSize = new Size(BoardSize_Width, BoardSize_Height);
static int SquareSize = 50; //每格的宽度应设置为实际的毫米数
static int winSize = 11;
public void Run()
{
List imagesList = new List() {
@"I:\csharp\images\left01.jpg",
@"I:\csharp\images\left02.jpg",
@"I:\csharp\images\left03.jpg",
@"I:\csharp\images\left04.jpg",
@"I:\csharp\images\left05.jpg"
};
List imagesPoints = new List();
Mat cameraMatrix = new Mat(), distCoeffs = new Mat();
Size imageSize = new Size();
bool found = false;
Mat[] imagesPointsM = new Mat[imagesList.Count];
for (int i = 0; i < imagesList.Count; i++)
{
Mat view = new Mat(imagesList[i]);
if (!view.Empty())
{
imageSize = view.Size();
Point2f[] pointBuf;
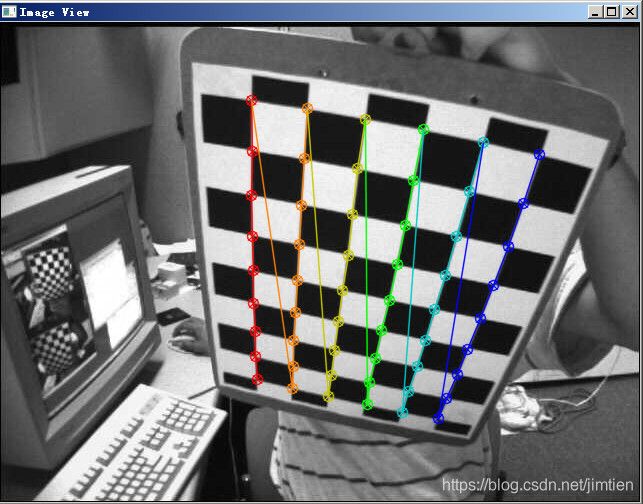
found = Cv2.FindChessboardCorners(view, BoardSize, out pointBuf, ChessboardFlags.AdaptiveThresh | ChessboardFlags.NormalizeImage);
if (found == true)
{
Mat viewGray = new Mat();
Cv2.CvtColor(view, viewGray, ColorConversionCodes.BGR2GRAY);
Cv2.CornerSubPix(viewGray, pointBuf, new Size(winSize, winSize), new Size(-1, -1), new TermCriteria(CriteriaTypes.Eps | CriteriaTypes.Count, 30, 0.0001));
imagesPoints.Add(pointBuf);
Mat p = Mat.FromArray(pointBuf);
imagesPointsM[i] = p;
Cv2.DrawChessboardCorners(view, BoardSize, pointBuf, found);
Mat temp = view.Clone();
Cv2.ImShow("Image View", view);
Cv2.WaitKey(500);
}
}
}
Mat[] rvecs = new Mat[0];
Mat[] tvecs = new Mat[0];
runCalibration(imagesList.Count, imageSize, out cameraMatrix, out distCoeffs, imagesPointsM, out rvecs, out tvecs, out double totalAvgErr);
Console.WriteLine("Camera Matrix:\n{0}", Cv2.Format(cameraMatrix));
Console.WriteLine("Distortion Coefficients:\n{0}", Cv2.Format(distCoeffs));
Console.WriteLine("Total Average Error:\n{0}", totalAvgErr);
Mat map1 = new Mat();
Mat map2 = new Mat();
Mat newCameraMatrix = Cv2.GetOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, imageSize, out Rect roi);
Cv2.InitUndistortRectifyMap(cameraMatrix, distCoeffs, new Mat(), newCameraMatrix, imageSize, MatType.CV_16SC2, map1, map2);
for (int i = 0; i < imagesList.Count; i++)
{
Mat view = Cv2.ImRead(imagesList[i], ImreadModes.Color);
Mat rview = new Mat();
if (view.Empty())
continue;
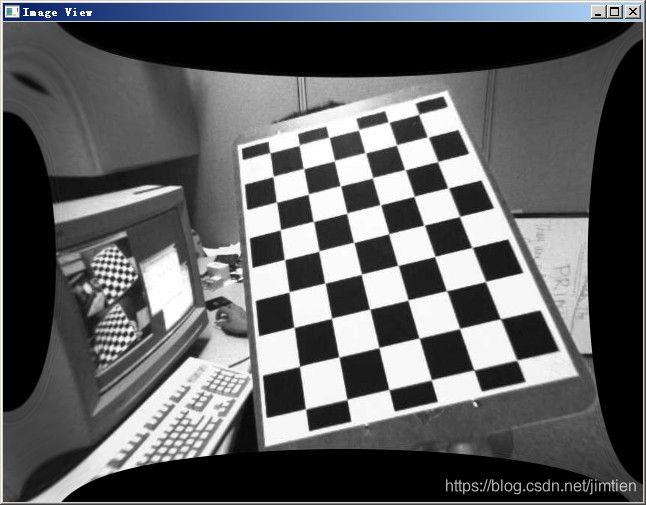
Cv2.Remap(view, rview, map1, map2, InterpolationFlags.Linear);
Cv2.ImShow("Image View", rview);
Cv2.WaitKey(500);
}
Cv2.WaitKey();
}
public static bool runCalibration(int imagesCount, Size imageSize, out Mat cameraMatrix, out Mat distCoeffs, Mat[] imagePoints, out Mat[] rvecs, out Mat[] tvecs, out double totalAvgErr)
{
cameraMatrix = Mat.Eye(new Size(3, 3), MatType.CV_64F);
distCoeffs = Mat.Zeros(new Size(8, 1), MatType.CV_64F);
Mat[] objectPoints = calcBoardCornerPositions(BoardSize, SquareSize, imagesCount);
//Find intrinsic and extrinsic camera parameters
double rms = Cv2.CalibrateCamera(objectPoints, imagePoints, imageSize, cameraMatrix, distCoeffs, out rvecs, out tvecs, CalibrationFlags.None);
bool ok = Cv2.CheckRange(InputArray.Create(cameraMatrix)) && Cv2.CheckRange(InputArray.Create(distCoeffs));
totalAvgErr = computeReprojectionErrors(objectPoints, imagePoints, rvecs, tvecs, cameraMatrix, distCoeffs);
return ok;
}
public static Mat[] calcBoardCornerPositions(Size BoardSize, float SquareSize, int imagesCount)
{
Mat[] corners = new Mat[imagesCount];
for (int k = 0; k < imagesCount; k++)
{
Point3f[] p = new Point3f[BoardSize.Height * BoardSize.Width];
for (int i = 0; i < BoardSize.Height; i++)
{
for (int j = 0; j < BoardSize.Width; j++)
{
p[i * BoardSize.Width + j] = new Point3f(j * SquareSize, i * SquareSize, 0);
}
}
//corners[k] = new Mat(BoardSize.Width, BoardSize.Height, MatType.CV_64F, p);
corners[k] = Mat.FromArray(p);
}
return corners;
}
public static double computeReprojectionErrors(Mat[] objectPoints, Mat[] imagePoints, Mat[] rvecs, Mat[] tvecs, Mat cameraMatrix, Mat distCoeffs)
{
Mat imagePoints2 = new Mat();
int totalPoints = 0;
double totalErr = 0, err;
for (int i = 0; i < objectPoints.Length; ++i)
{
Cv2.ProjectPoints(objectPoints[i], rvecs[i], tvecs[i], cameraMatrix, distCoeffs, imagePoints2);
err = Cv2.Norm(imagePoints[i], imagePoints2, NormTypes.L2);
int n = objectPoints[i].Width * objectPoints[i].Height;
//perViewErrors[i] = (float)Math.Sqrt(err * err / n);
totalErr += err * err;
totalPoints += n;
}
return Math.Sqrt(totalErr / totalPoints);
}
}
}
Camera Matrix:
[529.7323072631546, 0, 341.637394542699;
0, 529.8893813111246, 237.8977196717263;
0, 0, 1]
Distortion Coefficients:
[-0.3026327409202396, 0.2048271778048029, 0.001454843694634934, -0.0007689018321
320775, -0.2108852653389639]
Total Average Error: 0.419872613934806