ICLR 2020 | 抛开卷积,multi-head self-attention能够表达任何卷积操作
近年来很多研究将nlp中的attention机制融入到视觉的研究中,得到很不错的结果,于是,论文侧重于从理论和实验去验证self-attention可以代替卷积网络独立进行类似卷积的操作,给self-attention在图像领域的应用奠定基础
论文: On the Relationship between Self-Attention and Convolutional Layers
- 论文地址:https://arxiv.org/abs/1911.03584
- 论文代码:https://github.com/epfml/attention-cnn
Introduction
transformer的提出对NLP领域的研究有很大的促进作用,得益于attention机制,特别是self-attention,会考虑词间的相似性,对当前词进行加权输出。受到词间关系学习的启发,self-attention也开始用于视觉任务中,但大都是attention和convonlution的结合。Ramachandran在19年的研究中,用full attention model达到了resnet baseline的精度,模型参数和计算量相比卷积网络减轻了不少
因此,论文主要研究self-attention layer在图片处理上是否能达到convolutional layer的效果,贡献如下:
- 在理论层面,论文通过构造性证明self-attention layers能够替代任何卷积层
- 在实际层面,论文通过构造multi-head self-attention layer进行实验,证明attention-only架构的前几层的确学习到了关注query pixel附近的g网格区域特征
Background on attention mechanisms for vision
The multi-head self-attention layer
定义 X ∈ R T × D i n X\in \mathbb{R}^{T\times D_{in}} X∈RT×Din为输入矩阵,包含 T T T个 D i n D_{in} Din维的token,在NLP中,token对应着序列化的词,同样地也可以对应序列化的像素
![]()
![]()
self-attention layer从 D i n D_{in} Din到 D o u t D_{out} Dout的计算如公式1,2所示, A A A为attention scores,softmax将score转换为attention probabilities,该层的参数包含查询矩阵(query matrix) W q r y ∈ R D i n × D k W_{qry}\in \mathbb{R}^{D_{in}\times D_k} Wqry∈RDin×Dk,关键词矩阵(key matrix) W k e y ∈ R D i n × D k W_{key}\in \mathbb{R}^{D_{in}\times D_k} Wkey∈RDin×Dk,值矩阵(value matrix) W v a l ∈ R D i n × D o u t W_{val}\in \mathbb{R}^{D_{in}\times D_{out}} Wval∈RDin×Dout,都用于对输入进行变化,基本跟NLP中的self-attention一致
![]()
因为只考虑相关性,self-attention一个很重要的属性是,不管输入的顺序如何改变,输出都是不变的,这对于希望顺序对结果有影响的case影响很大,因此在self-attention基础上为每个token学习一个positional encoding参数, P ∈ R T × D i n P\in \mathbb{R}^{T\times D_{in}} P∈RT×Din为包含位置信息的embedding向量,可以有多种形式
![]()
这里采用multiple heads版本的self-attention,每个head的参数矩阵都不一样,能够提取不同的特征, N h N_h Nh个head输出 D h D_h Dh维结果concat后映射成 D o u t D_{out} Dout维的最终输出,两个新参数,映射矩阵(projection matrix) W o u t ∈ R N h D h × D o u t W_{out}\in \mathbb{R}^{N_hD_h\times D_{out}} Wout∈RNhDh×Dout,偏置 b o u t ∈ R D o u t b_{out}\in \mathbb{R}^{D_{out}} bout∈RDout
Attention for images


卷积是最适合神经网络的图片操作方法,给予图片 X ∈ R W × H × D i n X\in \mathbb{R}^{W\times H\times D_{in}} X∈RW×H×Din,卷积在 ( i , j ) (i,j) (i,j)的操作如公式5, W ∈ R K × K × D i n × D o u t W\in \mathbb{R}^{K\times K\times D_{in}\times D_{out}} W∈RK×K×Din×Dout, b ∈ R D o u t b\in \mathbb{R}^{D_{out}} b∈RDout,K为卷积核的大小

在图片上应用self-attention,定义查询像素和关键词像素 q , k ∈ [ W ] × [ H ] q,k\in[W]\times [H] q,k∈[W]×[H],输入的向量大小为 X ∈ R W × H × D i n X\in \mathbb{R}^{W\times H\times D_{in}} X∈RW×H×Din为了保持一致性,用1D的符号来代表2D坐标,比如 p = ( i , j ) p=(i,j) p=(i,j),用 X p X_p Xp代表 X i j X_{ij} Xij,用 A p A_p Ap代表 A i j A_{ij} Aij
Positional encoding for images
位置编码目前主要有两种,分别是绝对位置(absolute)编码和相对(relative)位置编码

在绝对位置编码中,每个像素拥有一个位置向量 P p P_p Pp(学习的或固定的),于是公式2可以转换为公式7
![]()
相对位置编码的核心是只考虑查询像素和查询像素之间的位置差异,如公式8,大体是将公式7的每一项的绝对位参数改为相对位置参数。attention scores只跟偏移 δ : = k − q \delta:=k-q δ:=k−q, u u u和 v v v是learnable参数,每个head都不一样,而每个偏移的相对位置编码 r δ ∈ R D p r_\delta\in \mathbb{R}^{D_p} rδ∈RDp是head共享的。关键词权重分成了两部分, W k e y W_{key} Wkey属于输入, W ^ k e y \widehat {W}_{key} W key属于偏移
![]()
公式9称为二次编码(quadratic encoding),参数 Δ ( h ) = ( Δ 1 ( h ) , Δ 2 ( h ) ) \Delta^{(h)}=(\Delta_1^{(h)},\Delta_2^{(h)}) Δ(h)=(Δ1(h),Δ2(h))和 α ( h ) \alpha^{(h)} α(h)分别代表中心点以及attention区域的大小,都是通过学习得来的,而 δ = ( δ 1 , δ 2 ) \delta=(\delta_1,\delta_2) δ=(δ1,δ2)则是固定的,代表查询像素和关键词像素的相对位移
Self-attention as a convolutional layer

定理1,对于multi-head self-attention, N h N_h Nh个head,每个head输出 D h D_h Dh维,整体最终输出 D o u t D_{out} Dout,相对位置编码 D p ≥ 3 D_p\ge 3 Dp≥3维,可以表示任何卷积,核大小为 N h × N h \sqrt{N_h}\times \sqrt{N_h} Nh×Nh,output channel为 m i n ( D h , D o u t ) min(D_h,D_{out}) min(Dh,Dout)
对于output channel不是固定 D o u t D_{out} Dout,论文认为当 D h < D o u t D_h
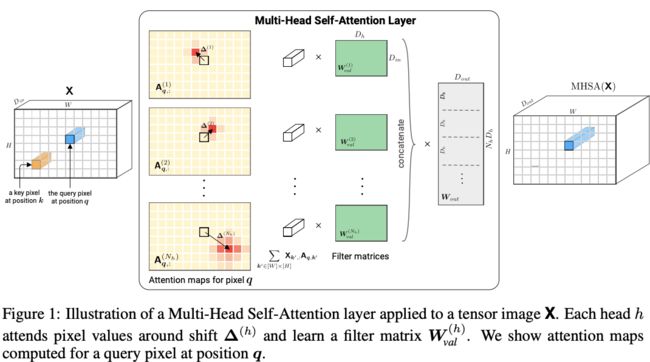
上面的定理表明,在选择适当的参数后,multi-head self-attention layer可以表现得跟卷积层一样,每个head的attention score关注不同偏移距离的像素,偏移值分别在集合 Δ K = − ⌊ K / 2 ⌋ , . . . , ⌊ K / 2 ⌋ \Delta_K={-\lfloor K/2\rfloor,...,\lfloor K/2\rfloor} ΔK=−⌊K/2⌋,...,⌊K/2⌋内,这样整体就类似于 K × K K\times K K×K核,如图1所示
卷积神经网络不止卷积核大小这个超参,还有很多其它超参,这里论文对输出的数值的一致性上进行了解释:
- Padding: multi-head self-attention layer默认使用"SAME"的填充模式,而卷积层会减小K-1个像素的图片大小,因此,为了减少边界影响,可以对卷积图片进行 ⌊ K / 2 ⌋ \lfloor K/2\rfloor ⌊K/2⌋的零填充
- Stride: 卷积神经网络的步长可以认为是在卷积后面加入一个pooling操作,而Theorem 1默认步长为1,但可以在后面接个pooling达到相同的结果
- Dilation: 因为multi-head self-attention可以设置任意的偏移值,因此也可以代表空洞卷积
Experiments

实验的主要目的在于验证self-attention进行类似卷积的操作,以及self-attention在实际中是否学习到了类似卷积的属性,包含3种类似的attention,分别为quadratic embedding,learned embedding和learnded embedding + content,具体可以看作者开源代码的attention score计算部分。根据作者的解答,前两种都对应于代码的第一种注释,区别在前者按照公式9来计算 r δ r_{\delta} rδ,后者则是完全随机学习来的,最后一种则对应注释的第三种
Implementation details
搭建一个包含6层multi-head self-attention的神经网络,实验主要和标准ResNet18对比,固定的图片输入,最后使用average pooling将结果送给分类器
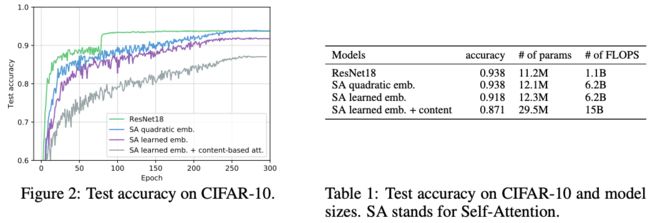
结果如图2和Table1所示,ResNet收敛更快,但不能确定这是卷积固有的属性还是结构优化带来的结果,由于实验的结构还是很naive的,所以会存在差距,通过一些优化手段应该可以解决
Quadratic encoding
论文进行实验验证公式9的相对位置编码 r δ r_{\delta} rδ是否学习到了类似卷积的操作,实验使用9个head来模拟 3 × 3 3\times 3 3×3卷积操作

从图3可以看出, 网络第四层中各head的位置变化,在经过优化后,各head关注的pixel形式类似于grid的分布,可见的确学到了类似卷积核的操作
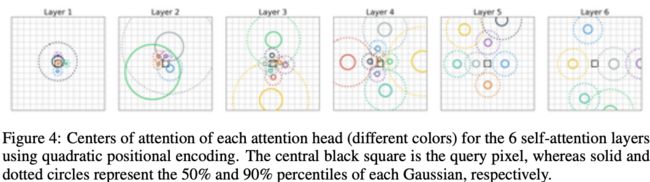
图4则展示了不同层的head分布,可以看到层1和2更关注local区域,而层3-6更关注更大的区域
Learned relative positional encoding

首先,论文去除了与输入数据相关的attention内容,仅考虑公式8的最后一项进行统计,结果如图5所示,层1-3非常接近查询区域,而深层数据则更关注整图的信息
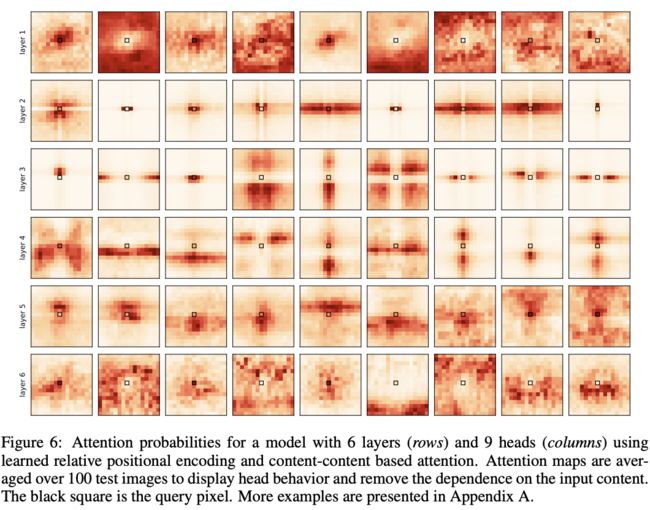
接着使用论文对positional attention和content-based attention进行了分析 ( q ⊺ r + q ⊺ k ) (q^\intercal r+q^\intercal k) (q⊺r+q⊺k),将100张图的attention probabilities进行了平均结果如图6所示。在层2和3中,尽管输入的数据不一样,但一些head学到了去关注查询像素附近的特定区域的像素这一行为,与卷积操作十分类似,而其它的head则使用了更多的content-based attention。在实际中,图6中的localized attention patterns是随着查询像素移动的,这与卷积操作更加类似,想请可以看 https://epfml.github.io/attention-cnn/
CONCLUSION
论文展示了self-attention layers可以表示任意convolutional layer的行为,以及full-attentional模型能够学会如何结合local behavior和基于输入内容global attention。在未来,可以将卷积网络的优化方法迁移到full-attention模型上,应用于不同数据领域的模型,例如图像,文字和时间序列
感谢
在论文阅读期间遇到了很多问题,给作者发了邮件后,很耐心地回答了我的问题,在这里十分感谢作者Jean-Baptiste Cordonnier
参考内容
- Stand-Alone Self-Attention in Vision Models - Ramachandran
写作不易,未经允许不得转载~
更多内容请关注 微信公众号【晓飞的算法工程笔记】
