Ubuntu16.04 安装ROS Kinetic 究级详细教程
Ubuntu16.04 安装ROS Kinetic 究级详细教程
- 1. “软件和更新”进行配置
-
- 1.1 Ubuntu Software
- 1.2 Other Software
- 2. 添加源
-
- 2.1 通过终端添加
- 2.2 输入密钥
- 3.更新软件和包
-
- 3.1 更新软件列表
- 3.2 更新已安装软件到最新版本
- 4.安装aptitude
- 5 安装ROS kinetic完整版
-
- 5.1 安装aptitude后可用下述代码安装
- 5.2 未安装aptitude的,可用下述代码安装
- 6 初始化rosdep
-
- 6.1 sudo rosdep init
-
- 6.1.1 出现问题1
- 6.1.2 出现问题2
- 6.2 rosdep update
-
- 6.2.1 问题1
- 6.2.2 解决方法1
- 6.2.3 其他解决方法
- 7 添加ros环境变量
- 8 安装依赖
- 9 测试ROS是否安装成功
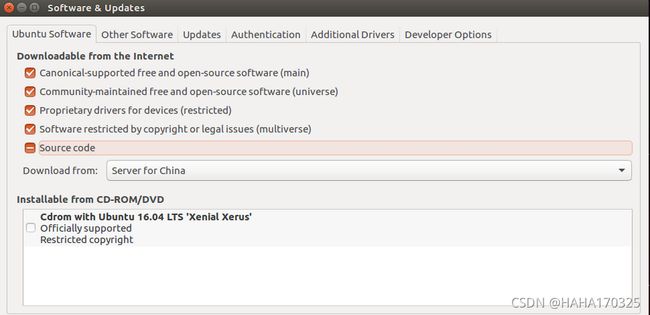
1. “软件和更新”进行配置
1.1 Ubuntu Software
配置完成后就可以关闭该窗口了。
1.2 Other Software
首先,打开“System Settings”->点击“Software&updates”->点击“Other Softwares”->点击左下角“Add”按钮。
在APT行里输入:
deb http://ros.exbot.net/rospackage/ros/ubuntu/ xenial main

2. 添加源
2.1 通过终端添加
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.2 输入密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
注意:如果上述显示链接超时,可用下述方式
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
或者:可以将上述链接改成:hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80。本实验尝试hkp://keyserver.ubuntu.com:80成功。
参考(作者:稻壳特筑)文章。
3.更新软件和包
3.1 更新软件列表
sudo apt-get update
3.2 更新已安装软件到最新版本
sudo apt-get upgrade
4.安装aptitude
参考(作者:稻壳特筑)文章。
好像不装也可以安装ROS成功,并使用。
sudo apt-get install aptitude
5 安装ROS kinetic完整版
注意:该版本对应于Ubuntu 16.04 (Xenial)
5.1 安装aptitude后可用下述代码安装
sudo aptitude install ros-kinetic-desktop-full
5.2 未安装aptitude的,可用下述代码安装
sudo apt-get install ros-kinetic-desktop-full
6 初始化rosdep
6.1 sudo rosdep init
sudo rosdep init
成功会显示:

6.1.1 出现问题1
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决方法1:
sudo gedit /etc/hosts
在文件末尾添加
151.101.84.133 raw.githubusercontent.com
或者
199.232.28.133 raw.githubusercontent.com
注意:如果还不行,参考
rosdep init 错误解决方法
中间一步骤的raw.githubusercontent.com网站的ip查询可以参考百度经验,不过实在windows下整的,有点麻烦。怎么查询网站的IP地址
参考文献:
6.1.2 出现问题2
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
解决方法:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
6.2 rosdep update
rosdep update
成功会显示:
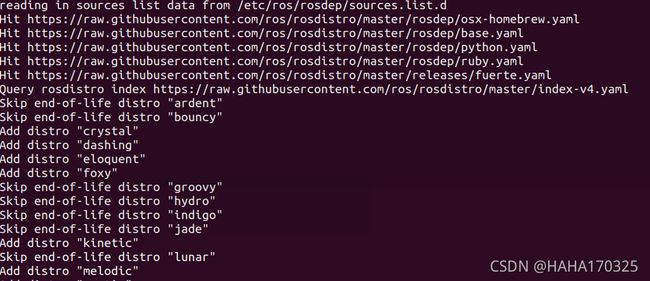
6.2.1 问题1
$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml]:
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml]:
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml]:
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml]:
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Add distro “ardent”
ERROR: error loading sources list:
6.2.2 解决方法1
ubuntu安装ROS进行到rosdep update时出现错误
sudo gedit /etc/resolv.conf
将原有的nameserver这一行注释,并添加以下两行:
nameserver 8.8.8.8 #google域名服务器
nameserver 8.8.4.4 #google域名服务器
保存退出,执行
sudo apt-get update
再执行
rosdep update
出想6.2 中成功的显示,就是成功了。
参考文献
如果问题还是没有解决,采用下述方法(尝试有效)
6.2.3 其他解决方法
(1)打开wifi连接手机热点(如果无法连接wifi,看下一步(2))
如果台式电脑无法完成,可以买个wifi接收器(擦汗),不是想打广告,不过给大家推荐个能在Ubuntu系统上使用的,我自己买的就是这个wifi接收器
(2)安装一个软件
打开链接下载:Ubuntu 14.04 64 bit
备用链接
(3)然后打开
在左上角的搜索您的计算机中,搜索
(4)执行
sudo apt-get update
sudo rosdep init
rosdep update
到这,我的是成功了,不然的话,在重复打开软件,连接之后,再试几次。感觉这个是上述解决不了的情况下最简单的。
要是还不行,还有个解决方案可以看一下,链接如下(我自己没有尝试过,仅供参考):
安装ROS, 初始化时rosdep update出错解决办法
ubuntu安装ROS进行到rosdep update时出现错误,如ERROR: unable to process source
7 添加ros环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
8 安装依赖
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
9 测试ROS是否安装成功
(1)CTRL+ALT+T打开终端(Termial),输入以下命令,初始化ROS环境:
roscore
(2)再打开一个新的终端(Termial),输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node
(3)再打开一个新的终端(Termial),输入以下命令
rosrun turtlesim turtle_teleop_key
然后,通过方向键控制小乌龟的移动。
(4)打开新的终端,输入以下命令,可以查看ROS节点信息
rosrun rqt_graph rqt_graph
完结。。。
参考文献:
Ubuntu16.04安装ROS Kinetic详细过程
ubuntu16.04环境中ROS安装
Ubuntu18.04安装ROS Melodic
安装ROS, 初始化时rosdep update出错解决办法
ubuntu安装ROS进行到rosdep update时出现错误,如ERROR: unable to process source
rosdep init 错误解决方法