3D Detection 论文汇总
来源丨AI 修炼之路
这篇文章主要是梳理一下近期3D Detection的进展,分类列举出一些我认为的比较重要的、有代表性的工作。
一、论文分类汇总
1. 基于激光雷达点云的3D检测方法(LiDAR only)
| 方法名称 | 方法类别 | 发表年份 | 代码是否开源 |
|---|---|---|---|
| Part-A^2 | LiDAR only | TPAMI 2020 | √ |
| PointRCNN | LiDAR only | CVPR 2019 | √ |
| STD | LiDAR only | ICCV 2019 | |
| PV-RCNN++ | LiDAR only | CVPR 2020 | √ |
| PointPillar | LiDAR only | CVPR 2019 | |
| MVP | LiDAR only | NIPS 2021 | √ |
| SE-SSD | LiDAR only | CVPR 2021 | √ |
| SA-SSD | LiDAR only | CVPR 2020 | √ |
| HVPR | LiDAR only | CVPR 2021 | √ |
| LiDAR RCNN | LiDAR only | CVPR 2021 | √ |
| SECOND | LiDAR only | Sensors 2018 | √ |
| 3DIoUMatch | LiDAR only | CVPR 2021 | √ |
| CenterPoint | LiDAR only | CVPR 2021 | √ |
| 3DSSD | LiDAR only | CVPR 2021 | √ |
| CIA-SSD | LiDAR only | AAAI 2021 |
2. 基于多模态融合的3D检测方法(LiDAR+RGB)
| 方法名称 | 方法类别 | 发表年份 | 代码是否开源 |
|---|---|---|---|
| AVOD-FPN | LiDAR+RGB | IROS 2018 | √ |
| F-PointNet | LiDAR+RGB | CVPR 2018 | |
| F-ConvNet | LiDAR+RGB | IROS 2019 | √ |
| 4D-Net | LiDAR+RGB | ICCV 2021 | √ |
| MV3D | LiDAR+RGB | CVPR 2017 | |
| CM3D | LiDAR+RGB | WACV 2021 | |
| H^2 3D RCNN | LiDAR+RGB | TCSVT 2021 | √ |
| ContFuse | LiDAR+RGB | ECCV 2018 | |
| MMF | LiDAR+RGB | CVPR 2019 |
3. 基于单目图像的3D检测方法(Monocular)
| 方法名称 | 方法类别 | 发表年份 | 代码是否开源 |
|---|---|---|---|
| AutoShape | Monocular | ICCV 2021 | √ |
| CaDDN | Monocular | CVPR 2021 | √ |
| MonoDLE | Monocular | CVPR 2021 | √ |
| DDMP | Monocular | CVPR 2021 | √ |
| GUPNet | Monocular | ICCV 2021 | |
| FCOS3D | Monocular | ICCVW 2021 | √ |
| PGD | Monocular | CoRL 2021 | √ |
| MonoGRNet | Monocular | TPAMI 2021 |
4. 基于双目图像的3D检测方法(Stereo)
| 方法名称 | 方法类别 | 发表年份 | 代码是否开源 |
|---|---|---|---|
| SIDE | Stereo | WACV 2022 | |
| LIGA-Stereo | Stereo | ICCV 2021 | √ |
| E2E-PL | Stereo | CVPR 2020 | √ |
5. 基于视角特征提取的3D检测方法
| 方法名称 | 方法类别 | 发表年份 | 代码是否开源 |
|---|---|---|---|
| H^2 3D RCNN | Front & Bird view | TCSVT 2021 | √ |
| PointPillar | Bird view | CVPR 2019 | √ |
| F-PointNet | Frustum | CVPR 2018 | |
| F-ConvNet | Frustum | IROS 2019 | √ |
| TANet | Bird view | AAAI 2020 | √ |
6. 基于特征补充/伪点云生成的3D检测方法(pseudo augment)
| 方法名称 | 方法类别 | 发表年份 | 代码是否开源 |
|---|---|---|---|
| PointPainting | pseudo augment | CVPR 2020 | |
| PointAugmenting | pseudo augment | CVPR 2021 | |
| E2E-PL | pseudo augment | CVPR 2020 | √ |
| Pseudo-LiDAR | pseudo augment | CVPR 2019 | √ |
| Pseudo-LiDAR++ | pseudo augment | ICLR 2020 | √ |
| MVP | pseudo augment | NIPS 2021 | √ |
7. 基于transformer的3D检测方法 (Transformer)
| 方法名称 | 方法类别 | 发表年份 | 代码是否开源 |
|---|---|---|---|
| VoTr | Transformer | ICCV 2021 | |
| CT3D | Transformer | ICCV 2021 | √ |
| M3DETR | Transformer | Arxiv | |
| DETR3D | Transformer | CoRL 2021 | √ |
| PoinTr | Transformer | ICCV 2021 | √ |
8. 基于半监督学习的3D检测方法(Semi supervised)
| 方法名称 | 方法类别 | 发表年份 | 代码是否开源 |
|---|---|---|---|
| 3DAL | Semi supervised | Arxiv | |
| 3DIoUMatch | Semi supervised | CVPR 2021 | √ |
| WS3D | Semi supervised | TPAMI 2021 | √ |
二、论文分类解读
由于篇幅限制,本文主要讲解基于激光雷达点云的3D检测方法(LiDAR only)。LiDAR only 指的是此类方法仅仅采用点云数据作为输入,方法的主要区分性在于对点云数据不同的特征提取方式。
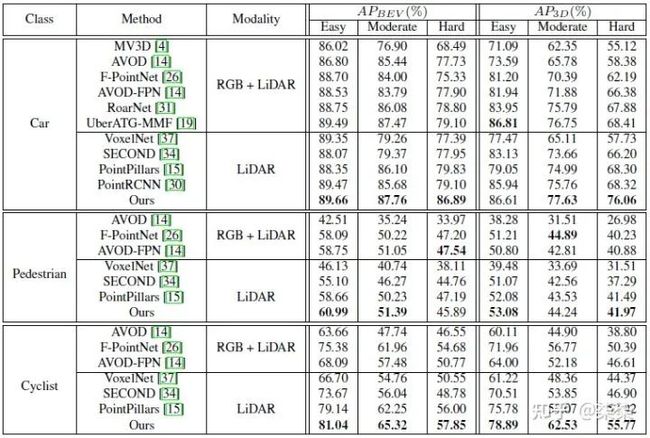
1. Part-A^2 (TPAMI 2020)
论文地址:https://arxiv.org/pdf/1907.03670.pdf
作者单位:The Chinese University of Hong Kong
代码地址:GitHub - open-mmlab/OpenPCDet: OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
一句话读论文:The ground-truth boxes of 3D object detection not only automatically provide accurate segmentation mask because of the fact that 3D objects are naturally separated in 3D scenes, but also imply the relative locations for each foreground 3D point within the ground truth boxes.
网络框架图:
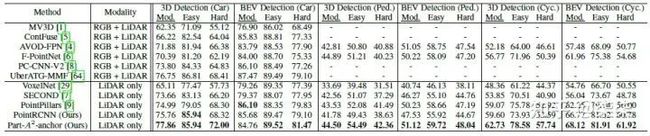
KITTI testset 实验结果:
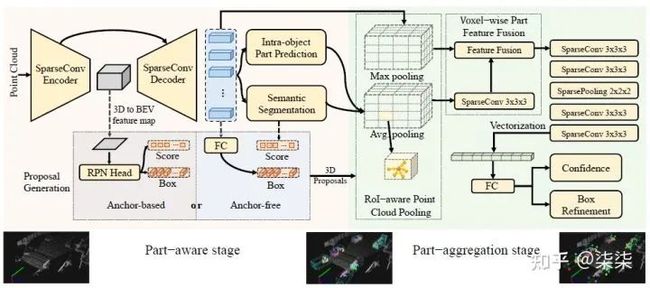
整体网络框架分为两个部分:Part-aware stage 和 Part-aggregation stage。
Part-aware stage:作者认为前景点的相对位置(intra-object part location)可以表征物体的形状信息。因此,通过估计前景点的相对位置,作者认为可以得到更具有辨别性的特征。
The part-aware network aims to extract discriminative features from the point cloud by learning to estimate the intra-object part locations of foreground points, since these part locations implicitly encode the 3D object’s shapes by indicating the relative locations of surface points of 3D objects.
Part-aggregation stage:既然是一个aggregation mechanism,作者具体聚合了哪些特征呢?文中作者主要融合了两部分特征,point-wise part location 以及 point-wise sementic features。利用融合后的特征,进一步预测每一个候选框的置信度和位置。
By considering the spatial distribution of the predicted intraobject part locations and the learned point-wise part features in a 3D box propsoal from stage-I, it is reasonable to aggregate all the information within a proposal for box proposal scoring and refinement.
2. Point RCNN (CVPR 2019)
论文地址:https://arxiv.org/pdf/1812.04244.pdf
作者单位:The Chinese University of Hong Kong
代码地址:https://github.com/sshaoshuai/PointRCNN
一句话读论文:The learned point representation from segmentation is not only good at proposal generation but is also helpful for the later box refinement.
网络框架:
KITTI testset 实验结果:

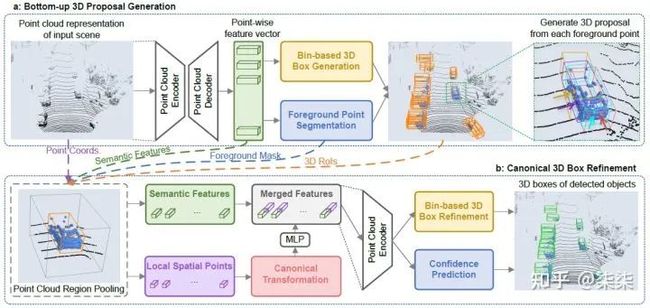
PointRCNN 整体为two-stage的框架,第一级生成proposal (Bottom-up 3D Proposal Generation),第二级对proposal进行微调并得到最终的检测结果 (Canonical 3D Box Refinement)。
Bottom-up 3D Proposal Generation:主要目的是做proposal的生成。对每一个point,提取point-wise feature,预测其属于前景点的概率和相应的proposal大小。对于生成的大量的proposal,利用NMS进行过滤,只保留其中的300个送入第二级进行微调。
Canonical 3D Box Refinement:提取第一级proposal更精细的特征用于分类回归。更精细的特征包括:点特征+空间位置特征+RoI特征。
3. STD (ICCV 2019)
论文地址:https://arxiv.org/pdf/1907.10471v1.pdf
作者单位:Youtu Lab, Tencent 等
一句话读论文:They propose a point-based proposal generation paradigm on point cloud with spherical anchors.
网络框架:
KITTI testset 实验结果:
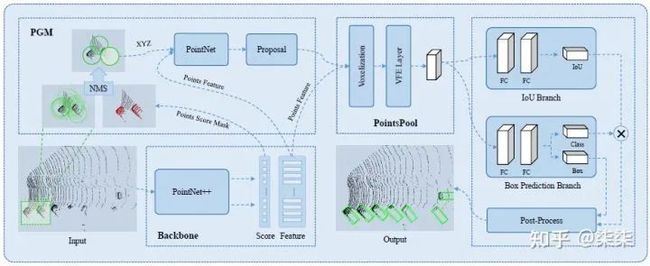
整体框架依然属于two-stage的网络,第一级生成proposal,第二级提取更精细的proposal (point+voxel)特征用于微调。与其他工作相比,STD 网络最大的不同之处在于proposal generation的过程中使用了球形anchor (spherical anchors)。那么如何从球形anchor得到proposal呢?其具体步骤是:
为所有点设定球形anchor → 判断其为前景点的概率 → NMS 过滤冗余anchor → 预测余下的anchor对应的proposal。
作者认为这种球形anchor的优点在于:球形anchor可以不必考虑物体朝向问题,极大减小了计算量;
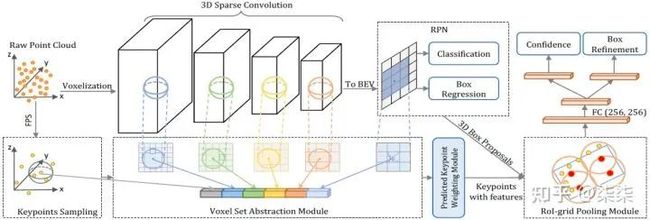
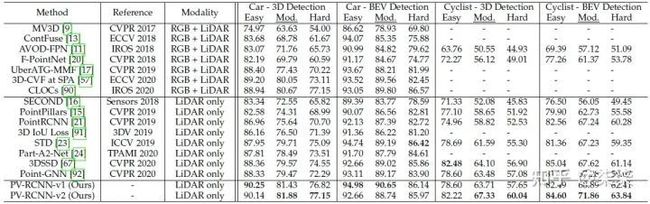
4. PV-RCNN/PV-RCNN++(CVPR 2020)
论文地址:https://arxiv.org/pdf/2102.00463.pdf
作者单位:The Chinese University of Hong Kong
代码地址:https://github.com/open-mmlab/OpenPCDet
一句话读论文:They propose a novel two-stage detection network for accurate 3D object detection through a two-step strategy of point-voxel feature aggregation.
网络框架:
KITTI testset 实验结果:
整体框架属于two-stage,有两个核心内容,第一个voxel feature → keypoints feature,第二个keypoints feature → proposal/grid feature。
voxel feature → keypoints feature。
将大量的voxel feature 整合在少量的keypoints上,整合的过程包括了:原始raw points feature + multi-scale voxel feature + bev feature;
keypoints feature → proposal/grid feature。
这一步其实就是利用之前整合的keypoints feature对每一个proposal做RoI Grid Pooling。只是需要额外注意的是,这个的grid 半径是多尺度的,作者认为这种方式可以提取更丰富的proposal feature。
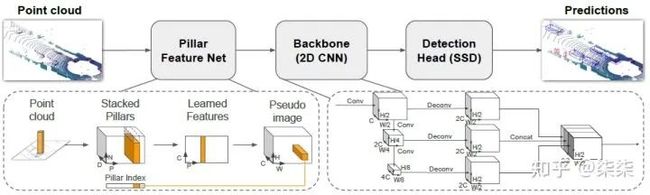
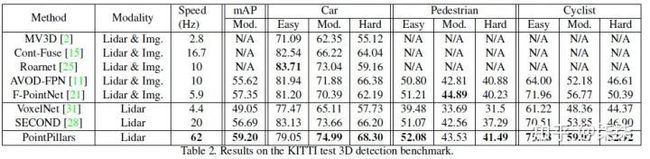
5. PointPillar(CVPR 2019)
论文地址:https://arxiv.org/pdf/1812.05784.pdf
作者单位:Oscar Beijbom and nuTonomy: an APTIV company
一句话读论文:A novel encoder which utilizes PointNets to learn a representation of point clouds organized in vertical columns (pillars).
网络框架:
KITTI testset 实验结果:
 本文仅做学术分享,如有侵权,请联系删文。
本文仅做学术分享,如有侵权,请联系删文。
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有ORB-SLAM系列源码学习、3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、深度估计、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~