Pytorch搭建网络架构
Train()
每次搭神经网络都要写这个train() 函数,这次Lab作业的train()函数的框架很全面,记录一下,供之后借鉴。
from tqdm import tqdm
import torch
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = my_model(...).to(device)
model = model.double()
lr = 0.001 # learning rate
criterion = nn.BCELoss()
optimizer = torch.optim.Adam(model.parameters(), lr=lr)
def train(x_train=my_docs_array_train,
y_train=my_labels_array_train,
x_test=my_docs_array_test,
y_test=my_labels_array_test,
word_dict=index_to_word,
batch_size=batch_size,
nb_epochs=nb_epochs):
train_data = get_loader(x_train, y_train, batch_size)
test_data = get_loader(my_docs_array_test, my_labels_array_test, batch_size)
best_validation_acc = 0.0
p = 0 # patience for early-stopping
for epoch in range(1, nb_epochs + 1):
# store the loss and accuracy in each batch
losses = []
accuracies = []
# use tqdm to better visualize the training process
with tqdm(train_data, unit="batch") as tepoch: # evaluate every batch
for idx, data in enumerate(tepoch):
tepoch.set_description(f"Epoch {epoch}") # custome the printed message in tqdm
model.train() # switch to `train` mode
optimizer.zero_grad()
input = data['document'].to(device)
label = data['label'].to(device)
label = label.double()
output = model.forward(input)[0]
output = output[:, -1]
loss = criterion(output, label)
loss.backward() # backward propagation
torch.nn.utils.clip_grad_norm_(model.parameters(), 0.5) # prevent exploding gradient
optimizer.step() # update parameters
# Attention: this is loss on whole batch of data, not averaged.
losses.append(loss.item())
accuracy = torch.sum(torch.round(output) == label).item() / batch_size
accuracies.append(accuracy)
# custome what is printed in tqdm message
tepoch.set_postfix(loss=sum(losses)/len(losses), accuracy=100. * sum(accuracies)/len(accuracies))
test_acc = evaluate_accuracy(test_data, False)
# Attention: loss is are averaged on batches.
print("===> Epoch {} Complete: Avg. Loss: {:.4f}, Validation Accuracy: {:3.2f}%"
.format(epoch, sum(losses)/len(losses), 100.*test_acc))
# save the model or not
if test_acc >= best_validation_acc:
best_validation_acc = test_acc
print("Validation accuracy improved, saving model...")
torch.save(model.state_dict(), './best_model.pt')
p = 0
print()
else:
p += 1
# early-stopping
if p==my_patience:
print("Validation accuracy did not improve for {} epochs, stopping training...".format(my_patience))
print("Loading best checkpoint...")
model.load_state_dict(torch.load('./best_model.pt'))
model.eval()
print('done.')

注意:losses存储的是一个batch全部数据的loss,而不是每个样本上的loss。因此tqdm的打印信息中的loss也是一个batch全部数据的loss,只不过是在本轮epoch训练过的Batch中的平均。
有的train()函数打印的是每个样本上的loss,要注意一下。
继承Dataset类
自定义的数据集要继承Dataset这个抽象类,并实现__len__、__getitem__方法。举个栗子:
from torch.utils.data import DataLoader, Dataset
class Dataset_(Dataset):
def __init__(self, x, y):
self.documents = x
self.labels = y
def __len__(self):
return len(self.documents)
def __getitem__(self, index):
document = self.documents[index]
label = self.labels[index]
sample = {
"document": torch.tensor(document),
"label": torch.tensor(label),
}
return sample
定义好了数据集,可以定义Dataloader了:
def get_loader(x, y, batch_size=32):
dataset = Dataset_(x, y)
data_loader = DataLoader(dataset=dataset,
batch_size=batch_size,
shuffle=True,
pin_memory=True,
drop_last=True,
)
return data_loader
保存与加载模型
保存模型参数与优化器:
torch.save({
'state_dict': myModel.state_dict(),
'optimizer' : optimizer.state_dict(),
}, 'model_lstm.pth.tar')
加载模型:
myModel = model(...).to(device)
checkpoint = torch.load('model_lstm.pth.tar')
myModel.load_state_dict(checkpoint['state_dict'])
myModel.eval()
Pytorch细节
其实,用Pytorch这个架构有很多细节和Tensorflow, Keras不一样。比如Pytorch要求必须指明线性层的输入、输出神经元的个数,但Tensorflow和 Keras可以从上一层的输出神经元个数推断出下一层线性层的输入神经元个数。搭个简单的模型:
import tensorflow as tf
inputs = tf.keras.Input(shape=(10,))
x = tf.keras.layers.Dense(4)(inputs)
outputs = tf.keras.layers.Dense(2)(x)
model = tf.keras.Model(inputs, outputs)
model.summary()
Dense层只需要定义输出神经元个数(这里是4)即可。看一下模型的summary:
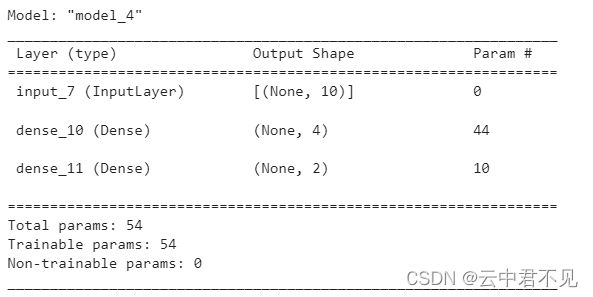
ps: 我最近才搞明白,output shape中的None是给batch size留空位的。
以后有时间再来更新~