【pytorch】1.4 tensor.view()、tensor.reshape()、tensor.resize_() 三者的区别
目录
- 1、Tensor 内部存储结构
-
- 1. 1 tensor 的步长属性: stride()
- 1. 2 tensor 的偏移属性:storage_offset()
- 1.3 存储区
- 2、tensor的连续性
- 3、tensor.view()、tensor.reshape()、tensor.resize_() 三者的区别
-
- 3.1 view()
- 3.2. reshape()
- 3.3. resize_()
-
- 1) 数据多的时候
- 2) 数据少的时候
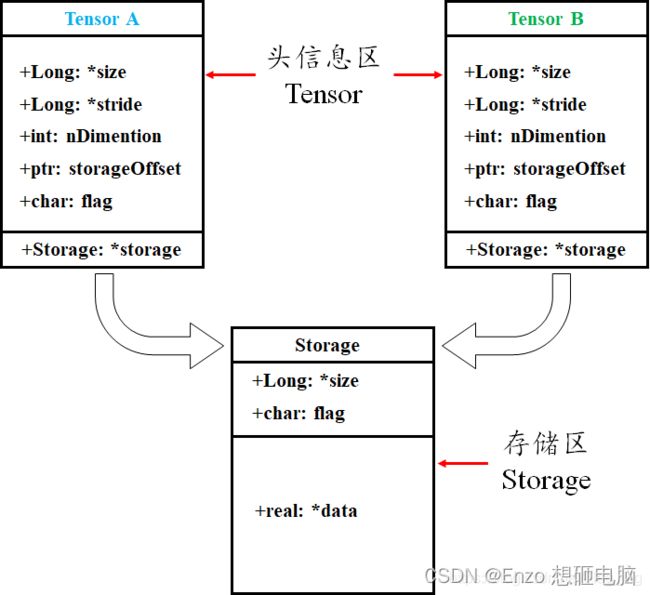
1、Tensor 内部存储结构
tensor 数据结构如下图所示,tensor 分为头信息区(Tensor)和存储区 (Storage),信息区主要保存着 Tensor 的形状(size)、步长(stride)、数据类型(type )等信息,而真正的数据则保存成连续的数组,存在存储区。
信息区占用内存较少,主要内存占用取决于 tensor 中元素数目,即存储区大小。由于数据动辄成千数万,所以采取这样的存储方式。
1. 1 tensor 的步长属性: stride()
2.2.1 stride()
在指定维度 dim 上,从一个元素跳到下一个元素所必须的步长(在存储区中经过的元素的个数)
a = torch.randn(3, 2)
print(a.stride())
>>(2, 1)

在第 0 维,想要跳到下一个元素,比如从 a[0][0] 到 a[1][0] ,需要经过 2个元素,步长是 2
在第 1 维,想要跳到下一个元素,比如从 a[0][0] 到 a[0][1], 需要经过 1个元素,步长是 1
1. 2 tensor 的偏移属性:storage_offset()
表示 tensor 的第 0 个元素与真实存储区的第 0 个元素的偏移量
a = torch.tensor([1, 2, 3, 4, 5])
b = a[1:]
c = a[3:]
print(b.storage_offset())
print(c.storage_offset())
>>1
>>3
可见,b的第 0 个元素与 a 的第 0 个元素之间的偏移量是 1,c 与 a 的偏移量是 3
1.3 存储区
一般来说,一个 tensor 有着与之对应的 storage , storage 是在 data 之上封装的接口。不同 tensor 的头信息一般不同,但却可能使用相同的 storage。
a.storage() :查看 a 存储的数据内容
id(a):查看 a 的内存地址,包括头信息区和存储区
id(a.storage):查看 a 的存储区的内存地址
a.storage().data_ptr():返回 a 首元素的内存地址
In [25]: a = t.arange(0, 6)
In [26]: a
Out[26]: tensor([0, 1, 2, 3, 4, 5])
In [27]: a.storage() # 查看a的存储的数据内容
Out[27]:
0
1
2
3
4
5
[torch.LongStorage of size 6]
In [28]: a.storage_offset()
Out[28]: 0
In [29]: a.storage_type()
Out[29]: torch.LongStorage
In [30]: b = a.view(2,3)
In [31]: b.storage()
Out[31]:
0
1
2
3
4
5
[torch.LongStorage of size 6]
可以通过 Python 的 id 值来判断它们在内存中的地址是否相等。
In [32]: id(a) == id(b)
Out[32]: False
In [33]: id(a.storage) == id(b.storage)
Out[33]: True
可以看到 a 和 b 的 storage 是相等的。
a 改变,b 也跟着改变,因为它们是共享 storage 的。
In [34]: a[1] = 100
In [35]: b
Out[35]:
tensor([[ 0, 100, 2],
[ 3, 4, 5]])
数据和存储区的差异,c 的数据是切片之后的值,而存储区仍然是整体的值。
In [36]: c = a[2:]
In [37]: c
Out[37]: tensor([2, 3, 4, 5])
In [43]: c.data
Out[43]: tensor([2, 3, 4, 5])
In [38]: c.storage()
Out[38]:
0
100
2
3
4
5
[torch.LongStorage of size 6]
In [39]: c.data_ptr(), a.data_ptr()
Out[39]: (132078864, 132078848)
In [40]: c.data_ptr() - a.data_ptr()
Out[40]: 16
data_ptr() 返回 tensor 首元素的内存地址,c 和 a 的内存地址相差 16,也就是两个元素,即每个元素占用 8 个字节(LongStorage)。
c[0] 的内存地址对应 a[2] 内存地址。
In [44]: c[0] = -100
In [45]: a
Out[45]: tensor([ 0, 100, -100, 3, 4, 5])
a.storage、b.storage 、c.storage 三者的内存地址是相等的。
In [49]: id(a.storage) == id(b.storage) == id(c.storage)
Out[49]: True
In [51]: a.storage_offset(), b.storage_offset(), c.storage_offset()
Out[51]: (0, 0, 2)
查看偏移位。
In [55]: d = b[::2, ::2]
In [56]: d
Out[56]: tensor([[ 0, -100]])
In [57]: b
Out[57]:
tensor([[ 0, 100, -100],
[ 3, 4, 5]])
In [58]: id(d.storage) == id(b.storage)
Out[58]: True
In [59]: b.stride()
Out[59]: (3, 1)
In [60]: d.stride()
Out[60]: (6, 2)
In [61]: d.is_contiguous()
Out[61]: False
由此可见,绝大多数操作并不修改 tensor 的数据,只是修改了 tensor 的头信息,这种做法更节省内存,同时提升了处理速度。此外,有些操作会导致 tensor 不连续,这时需要调用 torch.contiguous 方法将其变成连续的数据,该方法会复制数据到新的内存,不在与原来的数据共享 storage。
高级索引一般不共享 storage ,而普通索引共享 storage ,是因为普通索引可以通过修改 tensor 的 offset 、stride 和 size 实现,不修改 storage 的数据,而高级索引则不行。
2、tensor的连续性
tensor 的连续性说的其实是 stride() 属性 和 size() 之间的关系
连续性条件: s t r i d e [ i ] = s t r i d e [ i + 1 ] ∗ s i z e [ i + 1 ] stride[i] = stride[i+1] * size[i+1] stride[i]=stride[i+1]∗size[i+1]
意思就是,第 i i i 维跳到下一个元素走的步数,是 i + 1 i + 1 i+1 维走到下一维的步数,乘以 i + 1 i + 1 i+1 维数的个数。
比如二维数组中 s t r i d e [ 0 ] = s t r i d e [ 1 ] ∗ s i z e [ 1 ] stride[0] = stride[1] ∗ size[1] stride[0]=stride[1]∗size[1] ,代表的就是第 0 维走到下一个数,需要走完这一行。
比如上面的例子中
a = torch.tensor([1, 2, 3, 4, 5, 6])
b = a.view(2, 3)
对 b 来说:stride[0] = 3,stride[1] = 1,size[1] = 3。满足上面的条件
直观来说,就是:在存储区的真实数据中,在我旁边的数,现在还在我旁边,就叫连续
有些操作会改变连续性,比如转置
a = torch.tensor([1, 2, 3, 4, 5, 6]).view(2, 3)
b = a.t()
print(f'a : {a}')
print(f'b : {b}')
print(a.stride())
print(b.stride())
>>a : tensor([[1, 2, 3],
[4, 5, 6]])
>>b : tensor([[1, 4],
[2, 5],
[3, 6]])
>>(3, 1)
>>(1, 3)
b 是 a 的转置。
在第 0 维走到下一个元素,也就是 b[0][0] 走到b[1][0],从值为1的元素走到值为2 的元素,(在存储区的数据上看)步长是 1, s t r i d e [ 0 ] = 1 stride[0] = 1 stride[0]=1
同理, s t r i d e [ 1 ] = 3 stride[1] = 3 stride[1]=3, s i z e [ 1 ] = 3 size[1] = 3 size[1]=3
这就不满足式子了: s t r i d e [ 0 ] = s t r i d e [ 1 ] ∗ s i z e [ 1 ] stride[0] = stride[1] ∗ size[1] stride[0]=stride[1]∗size[1],因此是不连续的
3、tensor.view()、tensor.reshape()、tensor.resize_() 三者的区别
3.1 view()
view 从字面意思上就是 视图 的意思。因此,就是将数据以某种排列方式展示给我们,不改变存储区的真实数据,只改变头信息区
a = torch.tensor([1, 2, 3, 4, 5, 6])
b = a.view(2, 3)
print(f'a : {a}')
print(f'b : {b}')
print(f'storage address of a: {a.storage().data_ptr()}')
print(f'storage address of b: {b.storage().data_ptr()}')
>>a : tensor([1, 2, 3, 4, 5, 6])
>>b : tensor([[1, 2, 3],
[4, 5, 6]])
>>storage address of a: 93972187307840
>>storage address of b: 93972187307840
以上可见,二者共享存储区
print(f'storage of a: {a.storage()}')
print(f'storage of b: {b.storage()}')
>>[torch.LongStorage of size 6]
storage of a:
1
2
3
4
5
6
>>[torch.LongStorage of size 6]
storage of b:
1
2
3
4
5
6
以上可见,存储区的数据并没有发生改变
print(f'stride of a : {a.stride()}')
print(f'stride of b : {b.stride()}')
>>(1,)
>>(3, 1)
以上可见,stride 发生改变,也就是头信息区发生改变
3.2. reshape()
不连续是不能使用 view() 方法的。那有什么办法可以让不连续的tensor 使用 view() 呢?就是将其连续化(b.contiguous())
a = torch.tensor([1, 2, 3, 4, 5, 6]).view(2, 3)
b = a.t()
c = b.contiguous()
print(f'a : {a}')
print(f'b : {b}')
print(f'c : {c}')
# a : tensor([[1, 2, 3],
# [4, 5, 6]])
# b : tensor([[1, 4],
# [2, 5],
# [3, 6]])
# c : tensor([[1, 4],
# [2, 5],
# [3, 6]])
print(f'stride of a : {a.stride()}')
print(f'stride of b : {b.stride()}')
print(f'stride of c : {c.stride()}')
# tride of a : (3, 1)
# stride of b : (1, 3)
# stride of c : (2, 1)
print(f'storage of a: {a.storage()}')
print(f'storage of b: {b.storage()}')
print(f'storage of c: {c.storage()}')
# storage of a: 1
# 2
# 3
# 4
# 5
# 6
# [torch.storage._TypedStorage(dtype=torch.int64, device=cpu) of size 6]
# storage of b: 1
# 2
# 3
# 4
# 5
# 6
# [torch.storage._TypedStorage(dtype=torch.int64, device=cpu) of size 6]
# storage of c: 1
# 4
# 2
# 5
# 3
# 6
# [torch.storage._TypedStorage(dtype=torch.int64, device=cpu) of size 6]
print(f'storage address of a: {a.storage().data_ptr()}')
print(f'storage address of b: {b.storage().data_ptr()}')
print(f'storage address of c: {c.storage().data_ptr()}')
# storage address of a: 140157418240832
# storage address of b: 140157418240832
# storage address of c: 140157373156288
我们看到,c 的数据恢复了连续性,且其存储区的地址与 a, b 不同了。
contiguous() 函数其实就是创造了一个全新的 tensor。在存储区中,将 b 中的数据按顺序存放,得到 c
了解 contiguous() 之后,我们就来看看 reshape 的特性:
import torch
print('=============== view ===============')
a = torch.tensor([1, 2, 3, 4, 5, 6])
b = a.view(2, 3)
print(f'storage address of a: {a.storage().data_ptr()}') # storage address of a: 140386136382336
print(f'storage address of b: {b.storage().data_ptr()}') # storage address of a: 140386136382336
b[0, 1] = 9
print(f'a : {a}') # a : tensor([1, 9, 3, 4, 5, 6])
print(f'b : {b}') # b : tensor([[1, 9, 3], [4, 5, 6]])
print('============== 张量x满足连续性时 使用reshape ==============')
x = torch.tensor([1, 2, 3, 4, 5, 6]).view(2, 3)
y = x.reshape(3, 2)
print(f'storage address of x: {x.storage()}') # storage address of x: 1 2 3 4 5 6
print(f'storage address of y: {y.storage()}') # storage address of x: 1 2 3 4 5 6
print(f'storage address of x: {x.storage().data_ptr()}') # storage address of x: 140529895254784
print(f'storage address of y: {y.storage().data_ptr()}') # storage address of x: 140529895254784
y[0, 1] = 9
print(f'x : {x}') # x : tensor([[1, 9, 3], [4, 5, 6]])
print(f'y : {y}') # y : tensor([[1, 9], [3, 4], [5, 6]])
print('============== 张量m不满足连续性时 使用reshape ==============')
m = torch.tensor([1, 2, 3, 4, 5, 6]).view(2, 3).T
n = m.reshape(2, 3)
print(f'storage address of m: {m.storage()}') # storage address of x: 1 2 3 4 5 6
print(f'storage address of n: {n.storage()}') # storage address of x: 1 4 2 5 3 6
print(f'storage address of m: {m.storage().data_ptr()}') # storage address of m: 140529894838912
print(f'storage address of n: {n.storage().data_ptr()}') # storage address of n: 140529894443968
n[0, 1] = 9
print(f'm : {m}') # m : tensor([[1, 4], [2, 5], [3, 6]])
print(f'n : {n}') # n : tensor([[1, 9, 2], [5, 3, 6]])
这样我们可以说明 reshape() 和 view() 的区别了:
- 当 tensor 满足连续性要求时,reshape() = view(),和原来 tensor 共用存储区
- 当 tensor 不满足连续性要求时 (不连续是不能使用 view() 方法的),reshape() = **contiguous() + view(),会产生新的存储区的 tensor,与原来 tensor 不共用存储区
3.3. resize_()
前面说到的 reshape 和 view 都必须要用到全部的原始数据,比如你的原始数据只有12个,无论你怎么变形都必须要用到12个数字,不能多不能少。因此你就不能把只有12个数字的 tensor 强行 reshap 成 2*5 的维度的tensor。但是 resize_() 可以做到,无论你存储区原始有多少个数字,我都能变成你想要的维度,数字不够怎么办?随机产生凑!数字多了怎么办?就取我需要的部分!
1) 数据多的时候
a = torch.tensor([1, 2, 3, 4, 5, 6, 7])
b = a.resize_(2, 3)
print(f'a : {a}')
print(f'b : {b}')
print(f'stride of a : {a.stride()}')
print(f'stride of b : {b.stride()}')
print(f'storage address of a: {a.storage().data_ptr()}')
print(f'storage address of b: {b.storage().data_ptr()}')
>>a : tensor([[1, 2, 3],
[4, 5, 6]])
>>b : tensor([[1, 2, 3],
[4, 5, 6]])
>>stride of a : (3, 1)
>>stride of b : (3, 1)
>>storage address of a: 94579423708416
>>storage address of b: 94579423708416
print(a.storage())
>>
1
2
3
4
5
6
7
可见,取的是前 6 个。
会改变 a,但是并没有改变存储区中的数据,a, b 共用存储区
2) 数据少的时候
import torch
a = torch.tensor([1, 2, 3, 4, 5])
print(f'a : {a}') # a : tensor([1, 2, 3, 4, 5])
print(f'storage address of a: {a.storage().data_ptr()}') # storage address of a: 140227893580544
b = a.resize_(2, 3)
print(f'a : {a}') # a : tensor([[1, 2, 3], [4, 5, 140381257865520]])
print(f'b : {b}') # b : tensor([[1, 2, 3], [4, 5, 140381257865520]])
print(f'stride of a : {a.stride()}') # stride of a : (3, 1)
print(f'stride of b : {b.stride()}') # stride of b : (3, 1)
print(f'storage address of a: {a.storage().data_ptr()}') # storage address of a: 140227838241728
print(f'storage address of b: {b.storage().data_ptr()}') # storage address of a: 140227838241728
可见,补充了一个数
会改变 a,且改变了存储区中的数据,a, b 共用存储区(但是已经不是刚刚那个存储区了,地址变了)