1.寻找轮廓
api
void cv::findContours( InputOutputArray image, OutputArrayOfArrays contours, OutputArray hierarchy, int mode, int method, Point offset = Point()
各个参数详解如下:
Image表示输入图像,必须是二值图像,二值图像可以threshold输出、Canny输出、inRange输出、自适应阈值输出等。
Contours获取的轮廓,每个轮廓是一系列的点集合
Hierarchy轮廓的层次信息,每个轮廓有四个相关信息,分别是同层下一个、前一个、第一个子节点、父节点
mode 表示轮廓寻找时候的拓扑结构返回 -RETR_EXTERNAL表示只返回最外层轮廓 -RETR_TREE表示返回轮廓树结构
- CV_RETR_EXTERNAL:只检测外轮廓。忽略轮廓内部的洞
- CV_RETR_LIST:检测所有轮廓,但不建立继承(包含)关系
- CV_RETR_TREE:检测所有轮廓,并且建立所有的继承(包含)关系。也就是说用CV_RETR_EXTERNAL和CV_RETR_LIST方法的时候hierarchy这个变量是没用的,因为前者没有包含关系,找到的都是外轮廓,后者仅仅是找到所哟的轮廓但并不把包含关系区分。用TREE这种检测方法的时候我们的hierarchy这个参数才是有意义的
- CV_RETR_CCOMP:检测所有轮廓,但是仅仅建立两层包含关系。外轮廓放到顶层,外轮廓包含的第一层内轮廓放到底层,如果内轮廓还包含轮廓,那就把这些内轮廓放到顶层去。
Method表示轮廓点集合取得是基于什么算法,常见的是基于CHAIN_APPROX_SIMPLE链式编码方法
注意,如果图像底色是白色,则检测最外层的轮廓为图像边框
2.绘制轮廓外接矩形
绘制外接矩形包括两种:
绘制最大外接矩形
(Rect cv::boundingRect( InputArray points ))
其中,输入参数points为一系列点的集合(findContours中contours中的一个元素),对轮廓来说就是该轮廓的点集 返回结果是一个矩形,x, y, w, h
绘制最小外接矩形
RotatedRect cv::minAreaRect( InputArray points )
其中,输入参数points为一系列点的集合(findContours中contours中的一个元素) ,对轮廓来说就是该轮廓的点集 返回结果是一个旋转矩形,包含下面的信息: - 矩形中心位置 - 矩形的宽高 - 旋转角度。
3.代码
EdgeDetection.h
#pragma once #include#include using namespace std; using namespace cv; class EdgeDetection { cv::Mat m_img; cv::Mat m_canny; public: EdgeDetection(cv::Mat iamge); bool cannyProcess(unsigned int downThreshold,unsigned int upThreshold); bool getContours(); ~EdgeDetection(); };
EdgeDetection.cpp
#include "EdgeDetection.h"
EdgeDetection::EdgeDetection(cv::Mat image)
{
m_img = image;
}
bool EdgeDetection::cannyProcess(unsigned int downThreshold, unsigned int upThreshold)
{
bool ret=true;
if (m_img.empty())
{
ret = false;
}
cv::Canny(m_img, m_canny, downThreshold, upThreshold);
cv::imshow("Canny", m_canny);
return ret;
}
bool EdgeDetection::getContours()
{
bool ret = true;
if (m_canny.empty())
{
ret = false;
}
cv::Mat k = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3), cv::Point(-1, -1));
cv::dilate(m_canny, m_canny, k);
imshow("dilate", m_canny);
// 轮廓发现与绘制
vector > contours;
vector hierarchy;
findContours(m_canny, contours, cv::RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point());
for (size_t i = 0; i < contours.size();++i)
{
// 最大外接轮廓
cv::Rect rect = cv::boundingRect(contours[i]);
cv::rectangle(m_img,rect,cv::Scalar(0,255,0),2,LINE_8);
// 最小外接轮廓
RotatedRect rrt = minAreaRect(contours[i]);
Point2f pts[4];
rrt.points(pts);
// 绘制旋转矩形与中心位置
for (int i = 0; i < 4; i++) {
line(m_img, pts[i % 4], pts[(i + 1) % 4], Scalar(0, 0, 255), 2, 8, 0);
}
Point2f cpt = rrt.center;
circle(m_img, cpt, 2, Scalar(255, 0, 0), 2, 8, 0);
}
imshow("contours", m_img);
return ret;
}
EdgeDetection::~EdgeDetection()
{
}
main.cpp
#include"EdgeDetection.h"
using namespace std;
using namespace cv;
int main(int argc, char* argv[])
{
Mat src = imread("rect.jpg");
if (src.empty())
{
cout << "image is empty" << endl;
return -1;
}
imshow("input", src);
EdgeDetection ed(src);
ed.cannyProcess(80,160);
ed.getContours();
waitKey(0);
return 0;
}
原图
canny
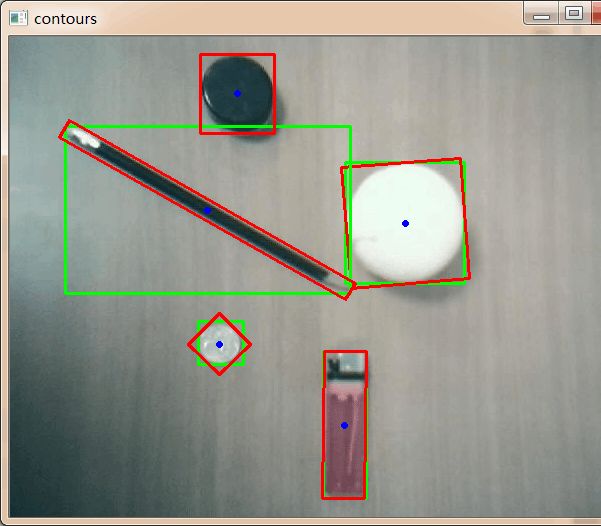
目标图
到此这篇关于OpenCV实现绘制轮廓外接矩形的文章就介绍到这了,更多相关OpenCV轮廓外接矩形内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!