【强化学习】蒙特卡洛方法
目录
动态规划的局限性
蒙特卡洛方法介绍
蒙特卡洛方法的使用条件
蒙特卡洛方法在强化学习中的基本思路
蒙特卡洛控制
没有Exploring Starts的MC控制
基于重要度采样的off policy预测
off-policy MC预测算法的增量式实现
off policy MC控制
蒙特卡洛方法的优势/劣势
使用on-policy first visit MC解决21点问题
动态规划的局限性
已知动态规划的价值-状态更新函数如下:
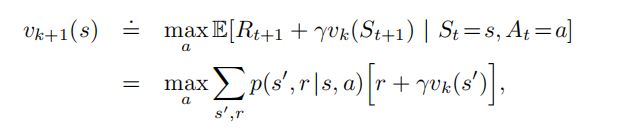
从上面的公式可以看出,动态规划有以下局限:
(1) 每更新一个状态的价值,需要遍历后续所有状态的价值,复杂度较高。
(2)很多时候状态转移概率![]() 未知,这时候我们无法使用动态规划求解。
未知,这时候我们无法使用动态规划求解。
蒙特卡洛方法介绍
蒙特卡洛并非一个特定的算法,而是一类随机算法的统称,其基本思想是:用事件发生的“频率”来替代事件发生的“概率”,这能解决上面所说的“状态转移概率未知”的问题。通过多次采样,使用该事件发生的频率来替代其发生的概率。
蒙特卡洛方法的特点如下:
(1)可以通过随机采样得到近似结果
(2)采样次数越多,结果越接近于真实值。
蒙特卡洛的整体思路是:模拟->抽样->估值
示例:
如何求 的值。一个使用蒙特卡洛方法的经典例子是
的值。一个使用蒙特卡洛方法的经典例子是
假设有一个直径为1的圆的面积为。
把这个圆放到一个边长为2的正方形(面积为4)中,圆的面积和正方形的面积比是:
如果可以测量出这个比值 ,那么
,那么![]() 。
。
如何测量?用飞镖去扎这个正方形。扎了许多次后,用圆内含的小孔数除以正方形含的小孔数可以近似的计算比值。
说明:
模拟——用飞镖去扎这个正方形为一次模拟。
抽样——数圆内含的小孔数和正方形含的小孔数。
估值——比值=圆内含的小孔数/正方形含的小孔数。
蒙特卡洛方法的使用条件
(1)环境是可模拟的。在实际的应用中,模拟容易实现。相对的,了解环境的完整知识反而比较困难。由于环境可模拟,我们就可以抽样。
(2)只适合情节性任务(episodic tasks)。因为,需要抽样完成的结果,只适合有限步骤的情节性任务。
游戏类都适合用蒙特卡洛方法。
蒙特卡洛方法在强化学习中的基本思路
蒙特卡洛方法的整体思路是:模拟->抽样->估值。
强化学习的目的是得到最优策略。求得最优策略的方法是求 和
和 。这是一个求值问题。
。这是一个求值问题。
结合GPI的思想。
下面是蒙特卡洛方法的一个迭代过程:
一、策略评估迭代
1、探索 - 选择一个状态-动作 。
。
2、模拟 - 使用当前策略,进行一次模拟,从当前到结束,随机产生一段情节(episode)。
3、抽样 - 获得这段情节上的每个状态的回报![]() ,记录
,记录![]() 到集合
到集合 。
。
二、策略优化 - 优化新的行动价值![]() 优化策略
优化策略
蒙特卡洛控制
经典的策略迭代算法的MC版本,从任意的策略 开始,交替进行完整的策略评估和策略改进,最终得到最优的策略和动作价值函数。
开始,交替进行完整的策略评估和策略改进,最终得到最优的策略和动作价值函数。

 表示策略评估,
表示策略评估, 表示策略改进。在经历过很多幕后,动作价值函数会趋向真实的动作价值函数。策略改进的方法是贪心地选择动作。所以对于任意的一个动作价值函数
表示策略改进。在经历过很多幕后,动作价值函数会趋向真实的动作价值函数。策略改进的方法是贪心地选择动作。所以对于任意的一个动作价值函数 ,对应的贪心策略为:对于任意
,对应的贪心策略为:对于任意 ,必定选择对应动作价值函数最大的动作。
,必定选择对应动作价值函数最大的动作。
策略改进可以通过将![]() 对应的贪心策略作为
对应的贪心策略作为![]() 来进行。这样的
来进行。这样的![]() 和
和![]() 满足策略改进定理,因为对于所有的状态
满足策略改进定理,因为对于所有的状态
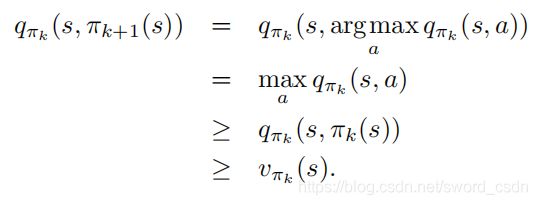
这个定理保证![]() 一定比
一定比 ,除非 已经是最优策略,此时两者均为最优策略。对于蒙特卡洛策略迭代,可以对每个episode交替进行评估与改进。每个episode结束后,使用观测到的回报进行策略评估,然后在该episode序列访问到的每一个状态上进行策略的改进。实现这一思路的算法称作基于Exploring Starts的MC算法。
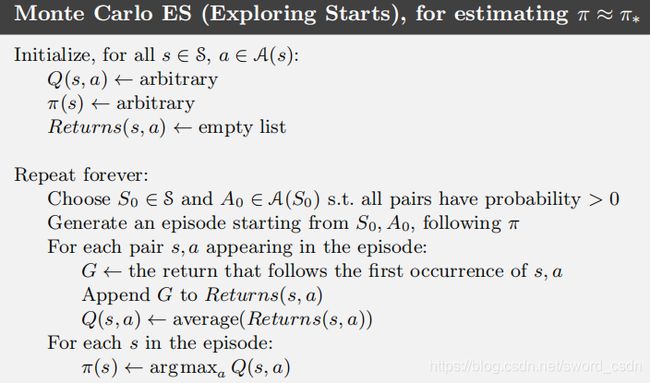
,除非 已经是最优策略,此时两者均为最优策略。对于蒙特卡洛策略迭代,可以对每个episode交替进行评估与改进。每个episode结束后,使用观测到的回报进行策略评估,然后在该episode序列访问到的每一个状态上进行策略的改进。实现这一思路的算法称作基于Exploring Starts的MC算法。
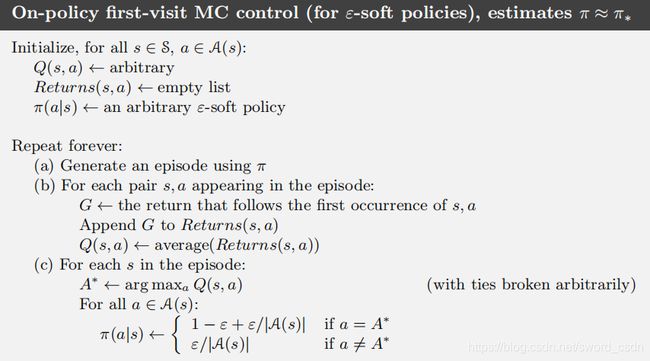
没有Exploring Starts的MC控制
从基于Exploring Starts的MC算法伪代码中可以看出,选择的![]() 和
和![]() 所组成的“状态-动作”要大于0,并且采样的每一个episode都要以
所组成的“状态-动作”要大于0,并且采样的每一个episode都要以![]() 开始,这样的条件其实比较苛刻。更具一般性的解决方案是不断选择所有可能的动作。有两种方法可以做到,分别是on-policy方法和off-policy方法
开始,这样的条件其实比较苛刻。更具一般性的解决方案是不断选择所有可能的动作。有两种方法可以做到,分别是on-policy方法和off-policy方法
on-policy和off-policy的区别
on-policy:生成样本的policy(value function)跟网络更新参数时使用的policy(value function)相同。典型为SARSA算法,基于当前的policy直接执行一次动作选择,然后用这个样本更新当前的policy,因此生成样本的policy和学习时的policy相同,算法为on-policy算法。该方法会遭遇探索-利用的矛盾,光利用目前已知的最优选择,可能学不到最优解,收敛到局部最优,而加入探索又降低了学习效率。epsilon-greedy 算法是这种矛盾下的折衷。优点是直接了当,速度快,劣势是不一定找到最优策略。
off-policy:生成样本的policy(value function)跟网络更新参数时使用的policy(value function)不同。典型为Q-learning算法,计算下一状态的预期收益时使用了max操作,直接选择最优动作,而当前policy并不一定能选择到最优动作,因此这里生成样本的policy和学习时的policy不同,为off-policy算法。先产生某概率分布下的大量行为数据(behavior policy),意在探索。从这些偏离(off)最优策略的数据中寻求target policy。当然这么做是需要满足数学条件的:假設π是目标策略, µ是行为策略,那么从µ学到π的条件是:π(a|s) > 0 必然有 µ(a|s) > 0成立。两种学习策略的关系是:on-policy是off-policy 的特殊情形,其target policy 和behavior policy是一个。劣势是曲折,收敛慢,但优势是更为强大和通用。其强大是因为它确保了数据全面性,所有行为都能覆盖。
在on policy的方法中,策略一般是“soft”的,即对于![]() ,都有
,都有![]() 。这里讨论的是
。这里讨论的是 -贪心策略,即大多数时候都采取获得最大估计值的动作价值函数所对应的动作,但同时以一个较小的概率随机选择一个动作。-贪心策略实际上是-软性策略的一个例子。
-贪心策略,即大多数时候都采取获得最大估计值的动作价值函数所对应的动作,但同时以一个较小的概率随机选择一个动作。-贪心策略实际上是-软性策略的一个例子。
on policy的MC控制总体依然是GPI,GPI并不要求优化过程中所遵循的策略一定是贪心的,只需逼近贪心策略即可。
基于重要度采样的off policy预测
on policy并不学习最优策略的动作值,而是学习一个接近最优而且仍能继续探索的策略的动作值。所以一种方法是采用两种策略,一个学习并成为最优策略,另一个有探索性,用于产生智能体的样本。一般情况下,on policy更简单,更容易想到。off policy方差大,收敛慢,但是更强大,更通用。
几乎所有的off - policy都采用了重要度采样,重要度采样是一种在给定来自其他分布的样本的条件下,估计某种期望值的通用方法。我们将重要性抽样应用于非策略学习,根据目标和行为策略下发生的轨迹的相对概率来加权return,这个相对概率也被称为重要度采样比。
给定起始状态 ,后续的状态-动作轨迹
,后续的状态-动作轨迹![]() 在策略下发生的概率是
在策略下发生的概率是

 是状态转移概率函数。因此,目标策略和行动策略下的相对概率(重要度采样比)是
是状态转移概率函数。因此,目标策略和行动策略下的相对概率(重要度采样比)是

从行动策略中得到的回报的期望回报![]() 是不准确的,所以不能用它来得到
是不准确的,所以不能用它来得到![]() 。所以需要重要度采样。使用比例系数
。所以需要重要度采样。使用比例系数![]() ,可以调整回报使其有正确的期望值。
,可以调整回报使其有正确的期望值。
![]()
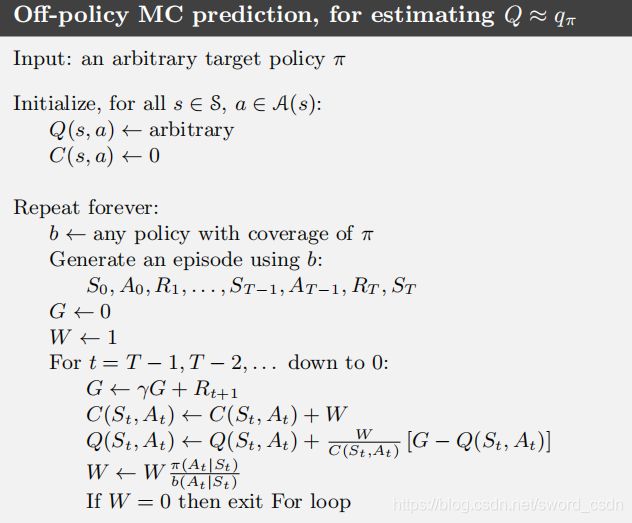
相关概念已解释完,现在给出通过观察到的一批遵循策略 的多episode采样序列,并将其回报进行平均来预测
的多episode采样序列,并将其回报进行平均来预测![]() 的MC算法。这里对时刻进行编号时,即使跨越episode的边界,编号有递增。即一个episode的终止时刻是100时,下一个episode则从101开始。先定义:
的MC算法。这里对时刻进行编号时,即使跨越episode的边界,编号有递增。即一个episode的终止时刻是100时,下一个episode则从101开始。先定义:
![]() :所有访问过状态
:所有访问过状态 的时刻集合。对于first visit方法,则只包含在episode内首次访问状态的时刻。
的时刻集合。对于first visit方法,则只包含在episode内首次访问状态的时刻。
![]() :时刻
:时刻 之后首次出现终止的那个状态的时刻。
之后首次出现终止的那个状态的时刻。
 :表示从开始到达
:表示从开始到达![]() 时的回报值。
时的回报值。
![]() :状态s对应的回报值。。
:状态s对应的回报值。。
![]() :对应的重要度采样比。
:对应的重要度采样比。
为了估计![]() ,根据重要度采样比来调整回报值并对结果进行平均。
,根据重要度采样比来调整回报值并对结果进行平均。
![]()
上式的重要度采样称为普通重要度采样。另一种方法是加权重要度采样。
从公式上看,普通重要度采样方法是无偏的,而加权重要度采样是有偏的。
off-policy MC预测算法的增量式实现
MC预测算法可以逐episode地进行增量式实现。在普通重要度采样的条件下的 off-policy MC预测如下:
off policy MC控制
用于生成行动数据的策略是行动策略。行动策略可能与实际上被评估和改善的策略无关,被评估和改善的策略称为目标策略。
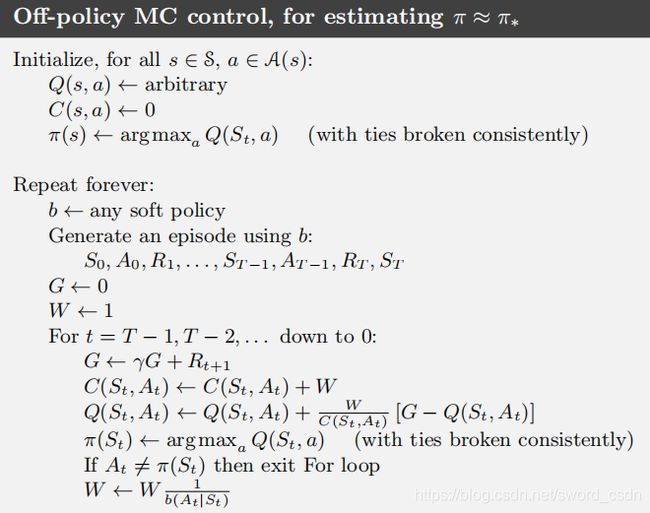
这个算法用于估计![]() 和
和![]() 。目标策略
。目标策略![]() 是对应
是对应 得到的贪心策略, 是对
得到的贪心策略, 是对 的估计。行动策略可以是任何策略,但是为了保证能收敛到一个最优的策略。对每一个“状态-动作”二元组需要取得无穷多次回报,这可以通过-soft的策略来保证。即使动作根据不同的soft策略选择,而且这个策略会在episode之间和之内发生变化,策略仍能在所有遇到的状态下收敛到最优。
的估计。行动策略可以是任何策略,但是为了保证能收敛到一个最优的策略。对每一个“状态-动作”二元组需要取得无穷多次回报,这可以通过-soft的策略来保证。即使动作根据不同的soft策略选择,而且这个策略会在episode之间和之内发生变化,策略仍能在所有遇到的状态下收敛到最优。
蒙特卡洛方法的优势/劣势
优势
1、蒙特卡洛方法可以从交互中直接学习优化的策略,而不需要一个环境的动态模型。环境的动态模型指的是表示环境的状态变化是可以完全推导的。表明了解环境的所有知识。
2、蒙特卡洛方法可以用于模拟(样本)模型。
3、可以只考虑一个小的状态子集。
4、每个状态价值的计算是独立的。不会影响其他的状态价值。
劣势
1、需要大量的探索(模拟)。
2、基于概率的,不是确定性的。
使用on-policy first visit MC解决21点问题
该游戏由2到6人进行,一名庄家,其余为玩家,使用除大小王之外的52张扑克牌,玩家的目标是使手中牌的点数之和不超过21点且尽量大。游戏过程中会给庄家和玩家每人发两张牌,一张为明牌,一张为暗牌。玩家可以根据手中牌点数和的大小与庄家手中牌点数来要牌 (hit) 并决定何时停牌(stick) 。当选择继续要牌后,若三张牌数的总和大于21点,则算自爆,游戏失败;停止请求牌后,庄家翻开扣着的牌,并抽牌,直到所有点数之和是17点或大于17点后,和玩家进行比较,谁的点数更靠近21,谁获胜;如果庄家自爆,玩家获胜;若两方点数相同,则为平局;具体点数计算规则如下:
(1)2到10的点数就是其牌面的数字。
(2)J,Q,K三种牌均记为10点。
(3)玩家A(Ace牌)可以当作1点,也可以当作11点,11点时称为“可用”;庄家A只能当作1点。
import matplotlib.pyplot as plt
import numpy as np
import seaborn as sns
import pandas as pd
import gym
env = gym.make("Blackjack-v0")#载入Gym中的21点游戏环境Blackjack-v0
# 玩家当前牌面的总点数范围是0-31
# 庄家明牌的点数范围是0-10
# 玩家使用Ace牌表示为True,反之为False
env.observation_space
#0表示停止要牌(stick),1表示继续要牌(hit)
env.action_space
q_table = {} #创建Q表,用于存储Q(s,a)
explore_rate=0.2 #探索率为0.2
soft_policy={} #创建空字典作为策略表,存储在状态s下选择动作a的概率
returns={}#创建空字典用于保存(s,a)对的累积奖励
def generate_episode(q_table,soft_policy):
#初始化一个列表,用于保存观测序列
episode=[]
#初始化环境
s = env.reset()
while True:
# 若状态s第一次出现,将它添加到q_table和soft_policy中
if s not in q_table.keys():
q_table[s]={0:0.0,1:0.0} #初始化0(stick)和1(hit)的Q值
soft_policy[s]=[0.5,0.5] #初始化0(stick)和1(hit)的概率,各为0.5
returns[s] = {0:[],1:[]} #初始化空列表用于存储累积奖励
# 利用soft_policy采样一个动作
a = np.random.choice([0,1],p=soft_policy[s],size=1)[0]
#与环境交互,产生奖励与下一状态
next_s,reward,done,_=env.step(a)
#将状态s、动作a、奖励reward添加到episode中
episode.append((s,a,reward))
#到达终止状态,循环结束
if done:
break
s=next_s
return episode
n_iter=50000
for i in range(n_iter):
#产生一个观测序列
print("Iterator {}".format(i))
episode = generate_episode(q_table,soft_policy)
#初始化累积奖励
G = 0.0
#反向遍历观测序列中的每一步
for t in range(len(episode))[::-1]:
#分别保存每一步的状态、动作和奖励
state,action,reward = episode[t]
#计算累积奖励
G=G+reward
#判断(state,action)是否第一次出现
if(state,action) not in [j[:2] for j in episode[:t]]:
#将G加入(state,action)的Returns中
returns[state][action].append(G)
# 更新Q表中的Q值
q_table[state][action] = np.mean(returns[state][action])
# 更新策略
a_star = np.argmax(list(q_table[state].values()))
soft_policy[state][a_star] = 1 - explore_rate + explore_rate / 2
soft_policy[state][1 - a_star] = explore_rate / 2
q_dataframe = pd.DataFrame([list(item.values()) for item in list(q_table.values())],
index = list(q_table.keys()),
columns = ['stick', 'hit'])
policy = pd.Series(np.where(q_dataframe.values[:, 0]>q_dataframe.values[:, 1], 'stick', 'hit'),index=list(q_table.keys()))
print(policy[:10])