图--最短路径(四种算法详解)
最短路径
- dijkstra算法
-
- 邻接矩阵实现
- 邻接表实现
- 最小堆优化
- 应用:多权值+多路径+路径输出
- Floyd算法
- Bellman ford算法
- SPFA算法
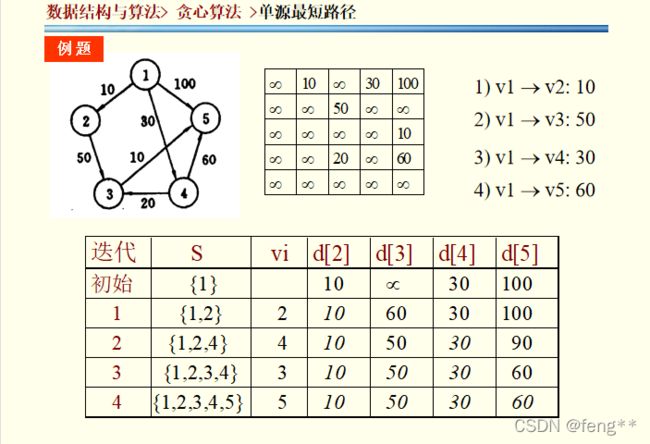
dijkstra算法
单源最短路径算法
伪码描述:

邻接矩阵实现
- 基本代码
#include
visited[min_i]=true;
for(int i=0;i<n;i++)
{
if(!visited[i]&&G[min_i][i]!=NoEdge)
{
if(dist[min_i]+G[min_i][i]<dist[i]) //最短路径优先考虑
{
dist[i]=dist[min_i]+G[min_i][i]; //更新最短路径长度
}
}
}
}
}
int main()
{
int s;
cin>>n>>m>>s;
for(int i=0;i<n;i++)
{
for(int j=0;j<n;j++)
G[i][j]=NoEdge;
}
for(int i=0;i<m;i++)
{
int v1,v2,len;cin>>v1>>v2>>len;
G[v1][v2]=len;
G[v2][v1]=len;
}
Solve(s); //求起点s到其他所有顶点的最短路径
return 0;
}
- 时间复杂度:O(n^2)
- 用来求所有顶点每两个顶点间的最短距离,对每个顶点调用Dijistra,时间复杂度为O(n^3)
邻接表实现
1.代码
#include- 时间复杂度:O(E+V)*V ----->O(n^2)
- 求多源最短路径,时间复杂度:O(E+V) * V * V----->O(n^3)
最小堆优化
1.代码
#include- 时间复杂度:O(E+V)*logV
- 算多源最短路径: O(E+V)* logV *V
应用:多权值+多路径+路径输出
PTA题目链接:
https://pintia.cn/problem-sets/15/problems/862
#include
visited[min_i]=true;
for(int i=0;i<n;i++)
{
if(!visited[i]&&G[min_i][i]!=NoEdge)
{
if(dist[min_i]+G[min_i][i]<dist[i]) //最短路径优先考虑
{
dist[i]=dist[min_i]+G[min_i][i]; //更新最短路径长度
Que[i]=Que[min_i]+Num[i]; //更新最优权值2
Path[i]=min_i; //更新最短路径
Cnt[i]=Cnt[min_i]; //更新最短路径条数
}
else if(dist[min_i]+G[min_i][i]==dist[i]) //路径长度相等考虑第二个权值
{
Cnt[i]+=Cnt[min_i]; //更新最短路径条数
if(Que[min_i]+Num[i]>Que[i])
{
Que[i]=Que[min_i]+Num[i];
Path[i]=min_i; //更新最短路径
}
}
}
}
}
cout<<Cnt[d]<<" "<<Que[d]<<endl;
int r=Path[d];
cout<<d<<" ";
while(r!=s)
{
cout<<r<<" ";
r=Path[r];
}
cout<<s<<endl;
}
int main()
{
int s,d;
cin>>n>>m>>s>>d;
for(int i=0;i<n;i++)
cin>>Num[i];
for(int i=0;i<n;i++)
{
for(int j=0;j<n;j++)
G[i][j]=NoEdge;
}
for(int i=0;i<m;i++)
{
int v1,v2,len;cin>>v1>>v2>>len;
G[v1][v2]=len;
G[v2][v1]=len;
}
Solve(d,s);
return 0;
}
Floyd算法
求多源最短路径的算法,只能用邻接矩阵实现
- 代码
#include";
int k=v1; //输出v1到v2的最短路径
while(k!=v2)
{
cout<<k<<"-->";
k=path[k][v2];
}
cout<<v2<<endl;
cin>>v1>>v2;
}
return 0;
}
- 算法复杂度:O(n^3) 无法进行优化
Bellman ford算法
求单源最短路径的算法
时间复杂度高,为O(E*V),比优化后的Dijistra算法差
bellman ford在dijistra算法不能用时才用,比如存在负权边,此时往往需要将其检测出来,如果有负权边,dijistra算法就会陷入负循环(Negative Cycles)中,因为每次总能找到一个更短的路径,就没法得到正确结果
- 基本思想:每次遍历所有的边,对每条边的到达点进行松弛,一共遍历顶点个数-1那么多次,双重循环,外层循环为顶点个数,内层循环遍历所有的边
如果存在负权值,第一次操作后能得到基本的最短路径的数组,此时需要重复进行刚才的步骤,判断是否存在负权值,但是在松弛步骤时不进行更新,而是将能进行更新的点的距离值设置为负无穷,表示该点就是负循环中的顶点(负权环或者负权环所影响的那些顶点),并且就表示图中有负权值 - 代码
#define INF 0x3f3f3f3f
struct Edge{
int u;//起
int v;//终
int weight;//长度
};
Edge edge[maxm];//用来存储所有的边
int dis[maxn];//dis[i]表示源点到i的最短距离
int n,m;//n个点,m条边
int s;//源点
bool Bellmen_ford()
{
for(int i=1;i<=n;i++)//初始化
dis[i]=INF;
dis[s]=0;//源节点到自己的距离为0
for(int i=1;i<n;i++)//松弛过程,计算最短路径
{
for(int j=1;j<=m;j++)
{
if(dis[edge[j].v]>dis[edge[j].u]+edge[j].weight)//比较s->v与s->u->v大小
dis[edge[j].v]=dis[edge[j].u]+edge[j].weight;
}
}
for(int j=1;j<=m;j++)//判断是否有负边权的边
{
if(dis[edge[j].v]>dis[edge[j].u]+edge[j].weight)
return false; //设置为负无穷,最后数组中为负无穷的顶点就是负循环中的点
}
return true;
}
bellman-ford的思想和dijkstra很像,其关键点都在于不断地对所有边进行松弛,不加以选择。而最大的区别就在于前者能作用于负边权的情况。其实现思路是在求出最短路径后,判断此刻是否还能对便进行松弛,如果还能进行松弛,便说明还有负边权的边。
SPFA算法
最强大,最快的单源最短路径算法
- 算法思想 :设立一个队列用来保存待优化的点,优化时每次取出队首结点min_i,并且用min_i点当前的最短路径估计值对min_点所指向的结点t进行松弛操作,如果t点的最短路径估计值有所调整,且t点不在当前的队列中,就将t点放入队尾。这样不断从队列中取出结点来进行松弛操作,直至队列空为止。
外循环控制出队,内循环控制更新和入队
更新的点不一定会入队(要满足不在队列中) 在队列中的加进去了也没啥事儿,只是会重复很多无用的计算,导致时间增多
已经出队了的点也可能再次入队(满足不在队列中) - 时间复杂度:O(KE),K为常数,平均值为2
- 用来算多源最短路径,时间复杂度:O(KE*V)
- 代码
#includeSPFA算法是Bellman-ford算法的队列优化,比较常用。SPFA算法在负边权图上可以完全取代Bellman-ford算法,另外在稀疏图中也表现良好。但是在非负边权图中,为了避免最坏情况的出现,通常使用效率更加稳定的Dijkstra算法,以及它的使用堆优化的版本。通常的SPFA算法在一类网格图中的表现不尽如人意。不是很稳定,不如Dijkstra。
经典练习题:csp认证的第五题:
csp-201903
一般图用邻接表的形式存储会比邻接矩阵快
使用算法时要尽量进行优化