基于模型预测控制MPC的无人机轨迹跟踪
模型预测控制MPC
算法主要思想是用优化的方法解决控制和规划问题。
MPC主要分为三部分
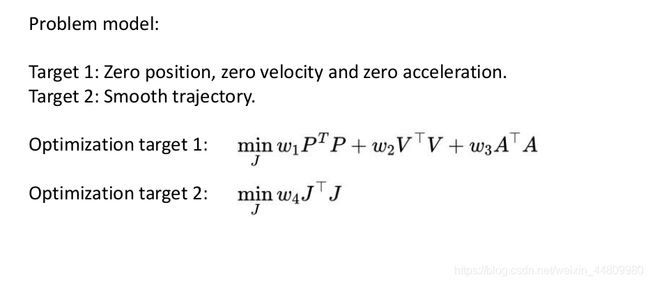
- 建模:系统建模和问题建模
- 预测:参数空间 状态空间 输入空间
- 控制:选择最好的策略

算法过程
- 系统建模
- 问题建模
- 优化
- 控制




基本的MPC过程用MATLAB代码实现
主函数 hw8.m
clear all;
clc;
close all;
//初始化状态
p_0 = [0 8 20];
v_0 = [0 0 0];
a_0 = [0 0 0];
K = 20;
dt = 0.2;
omega = 0.5;
velocity = 0.5;
P=[];
V=[];
A=[];
k=0;
//离散时间总时间T为:dt=0.2s
for t=0.2:0.2:40
k = k+1;
//预测过程 同样离散时间 ,建立tracking曲线,包含曲线各点的pva信息
//参考线为Z向速度恒定的圆锥螺旋曲线
// x = r sin(wt) y = r cos(wt) z =20 - 0.5t
//代码中的 v a 要求导得到
for i= 1:20
tref = t + 0.2 * i;
r= 0.25*tref;
pt(i,1) = r * sin(omega * tref);
vt(i,1) = omega * r * cos(omega * tref);
at(i,1) = -omega * omega * r * sin(omega * tref);
pt(i,2) = r * cos(omega * tref);
vt(i,2) = omega * r * sin(omega * tref);
at(i,2) = -omega * omega * r * cos(omega * tref);
pt(i,3) = 20 - velocity * tref;
vt(i,3) = -velocity;
at(i,3) = 0;
end
//再xyz三个维度求解MPC
j(1) = getMPC(K,dt,p_0(1),v_0(1),a_0(1),pt(:,1),vt(:,1),at(:,1));
j(2) = getMPC(K,dt,p_0(2),v_0(2),a_0(2),pt(:,2),vt(:,2),at(:,2));
j(3) = getMPC(K,dt,p_0(3),v_0(3),a_0(3),pt(:,3),vt(:,3),at(:,3));
//控制部分 将得到的最优j推到pva信息
for i =1:3
p_0(i) = p_0(i) +v_0(i) *dt + 0.5*a_0(i) *dt^2 + 1/6*j(i) *dt^3;
v_0(i) = v_0(i) +a_0(i) *dt + 0.5*j(i) *dt^2;
a_0(i) = a_0(i) +j(i) *dt;
end
//记录pva 以便后来画出曲线
P = [P;k p_0 pt(1,:)];
V = [V;k v_0 vt(1,:)];
A = [A;k a_0 at(1,:)];
end
//画图
figure
scatter3(P(:,5),P(:,6),P(:,7));
hold on
plot3(P(:,2),P(:,3),P(:,4),'--');
legend('refierence','tracking');
figure
plot(P(:,1),P(:,2),'-',P(:,1),P(:,5),'--');
legend('x','xref')
figure
plot(P(:,1),P(:,3),'-',P(:,1),P(:,6),'--');
legend('y','yref')
figure
plot(P(:,1),P(:,4),'-',P(:,1),P(:,7),'--');
legend('z','zref')
figure
plot(V(:,1),V(:,2),V(:,1),V(:,5));
legend('vx','vxref');
figure
plot(V(:,1),V(:,3),V(:,1),V(:,6));
legend('vy','vyref');
figure
plot(V(:,1),V(:,4),V(:,1),V(:,7));
legend('vz','vzref');
figure
plot(A(:,1),A(:,2),A(:,1),A(:,5));
legend('ax','axref');
figure
plot(A(:,1),A(:,3),A(:,1),A(:,6));
legend('ay','ayref');
figure
plot(A(:,1),A(:,4),A(:,1),A(:,7));
legend('az','zxref');
getMPC函数
function j = getMPC(K,dt,p_0,v_0,a_0,pt,vt,at)
//H矩阵的权重值
w1 = 100;
w2 = 1;
w3 = 1;
w4 = 1;
//预测矩阵
[Tp,Tv,Ta,Bp,Bv,Ba] = getPredictioinMatrix(K,dt,p_0,v_0,a_0);
//构建H F A b 这里把约束条件vmax amax带入进b
H = w4*eye(K)+w1*(Tp'*Tp)+w2*(Tv'*Tv)+w3*(Ta'*Ta);
F = w1*(Bp-pt)'*Tp + w2*(Bv-vt)'*Tv + w3*(Ba-at)'*Ta;
A = [Tv; -Tv; Ta; -Ta];
b = [6* ones(20,1)-Bv;6 * ones(20,1)+Bv;3* ones(20,1)-Ba; 3*ones(20,1)+Ba];
//二次规划求解
J = quadprog(H,F,A,b);
j=J(1);
end
预测矩阵函数 getPrectioninMAtrix.m
function [Tp, Tv, Ta, Bp, Bv, Ba] = getPredictioinMatrix(K,dt,p_0,v_0,a_0)
Ta = zeros(K);
Tv = zeros(K);
Tp = zeros(K);
for i=1:K
Ta(i,1:i)=ones(1,i)*dt;
end
for i=1:K
for j=1:i
Tv(i,j) = (i-j+0.5)*dt^2;
end
end
for i=1:K
for j=1:i
Tp(i,j) = ((i-j+1)*(i-j)/2 + 1/6) * dt^3;
end
end
Ba = ones(K,1)*a_0;
Bv = ones(K,1)*v_0;
Bp = ones(K,1)*p_0;
for i=1:K
Bv(i) = Bv(i) + i*dt*a_0;
Bp(i) = Bp(i) + i*dt*v_0+i^2/2*a_0*dt^2;
end
结果
