Python人工智能参——决策树
一、总结
一句话总结:
决策树是一种机器学习的方法。决策树的生成算法有ID3, C4.5和CART等。决策树可以帮助我们解决分类与回归两类问题。
决策树是一种树形结构,其中每个内部节点表示一个属性上的判断,每个分支代表一个判断结果的输出,最后每个叶节点代表一种分类结果。
1、决策树实例:比如我要将学生分成好学生还是坏学生?
我们可以依据训练的决策树的模型,比如分数大于90分就是好学生,比如分数没大于90但是出勤高,也是好学生,以次类推
2、常见的决策树生成算法?
由 Quinlan 在 1986 年提出的 ID3 算法
由 Quinlan 在 1993 年提出的 C4.5 算法
由 Breiman 等人在 1984 年提出的 CART 算法
二、决策树
决策树是一种机器学习的方法。决策树的生成算法有ID3, C4.5和C5.0等。决策树是一种树形结构,其中每个内部节点表示一个属性上的判断,每个分支代表一个判断结果的输出,最后每个叶节点代表一种分类结果。
决策树是一种十分常用的分类方法,需要监管学习(有教师的Supervised Learning),监管学习就是给出一堆样本,每个样本都有一组属性和一个分类结果,也就是分类结果已知,那么通过学习这些样本得到一个决策树,这个决策树能够对新的数据给出正确的分类。这里通过一个简单的例子来说明决策树的构成思路:
给出如下的一组数据,一共有十个样本(学生数量),每个样本有分数,出勤率,回答问题次数,作业提交率四个属性,最后判断这些学生是否是好学生。最后一列给出了人工分类结果。
然后用这一组附带分类结果的样本可以训练出多种多样的决策树,这里为了简化过程,我们假设决策树为二叉树,且类似于下图:
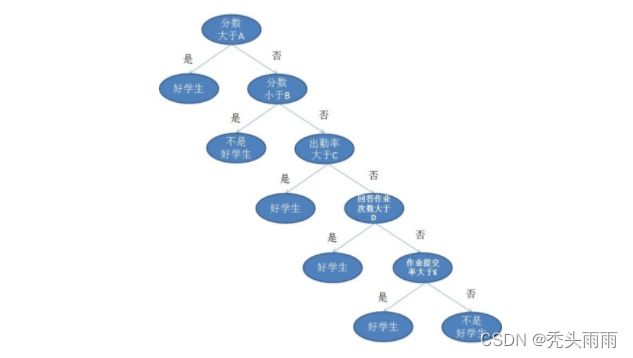
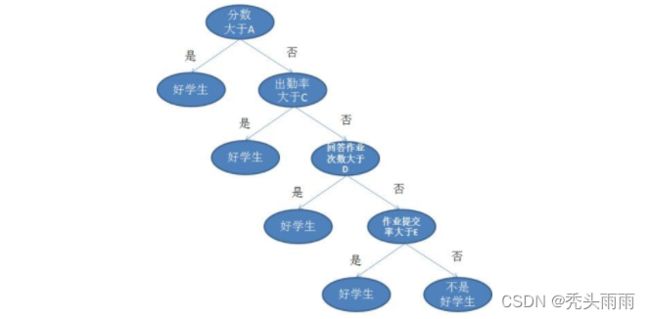
通过学习上表的数据,可以设置A,B,C,D,E的具体值,而A,B,C,D,E则称为阈值。当然也可以有和上图完全不同的树形,比如下图这种的:
所以决策树的生成主要分以下两步,这两步通常通过学习已经知道分类结果的样本来实现。
1. 节点的分裂:一般当一个节点所代表的属性无法给出判断时,则选择将这一节点分成2个
子节点(如不是二叉树的情况会分成n个子节点)
2. 阈值的确定:选择适当的阈值使得分类错误率最小 (Training Error)。
比较常用的决策树有ID3,C4.5和CART(Classification And Regression Tree),CART的分类效果一般优于其他决策树。下面介绍具体步骤。
ID3: 由增熵(Entropy)原理来决定那个做父节点,那个节点需要分裂。对于一组数据,熵越小说明分类结果越好。熵定义如下:
Entropy=- sum [p(x_i) * log2(P(x_i) ]
其中p(x_i) 为x_i出现的概率。假如是2分类问题,当A类和B类各占50%的时候,
Entropy = - (0.5*log_2( 0.5)+0.5*log_2( 0.5))= 1
当只有A类,或只有B类的时候,
Entropy= - (1*log_2( 1)+0)=0
所以当Entropy最大为1的时候,是分类效果最差的状态,当它最小为0的时候,是完全分类的状态。因为熵等于零是理想状态,一般实际情况下,熵介于0和1之间。
熵的不断最小化,实际上就是提高分类正确率的过程。
比如上表中的4个属性:单一地通过以下语句分类:
1. 分数小于70为【不是好学生】:分错1个
2. 出勤率大于70为【好学生】:分错3个
3. 问题回答次数大于9为【好学生】:分错2个
4. 作业提交率大于80%为【好学生】:分错2个
最后发现 分数小于70为【不是好学生】这条分错最少,也就是熵最小,所以应该选择这条为父节点进行树的生成,当然分数也可以选择大于71,大于72等等,出勤率也可以选择小于60,65等等,总之会有很多类似上述1~4的条件,最后选择分类错最少即熵最小的那个条件。而当分裂父节点时道理也一样,分裂有很多选择,针对每一个选择,与分裂前的分类错误率比较,留下那个提高最大的选择,即熵减最大的选择。
C4.5:通过对ID3的学习,可以知道ID3存在一个问题,那就是越细小的分割分类错误率越小,所以ID3会越分越细,比如以第一个属性为例:设阈值小于70可将样本分为2组,但是分错了1个。如果设阈值小于70,再加上阈值等于95,那么分错率降到了0,但是这种分割显然只对训练数据有用,对于新的数据没有意义,这就是所说的过度学习(Overfitting)。
分割太细了,训练数据的分类可以达到0错误率,但是因为新的数据和训练数据不同,所以面对新的数据分错率反倒上升了。决策树是通过分析训练数据,得到数据的统计信息,而不是专为训练数据量身定做。
就比如给男人做衣服,叫来10个人做参考,做出一件10个人都能穿的衣服,然后叫来另外5个和前面10个人身高差不多的,这件衣服也能穿。但是当你为10个人每人做一件正好合身的衣服,那么这10件衣服除了那个量身定做的人,别人都穿不了。
所以为了避免分割太细,c4.5对ID3进行了改进,C4.5中,优化项要除以分割太细的代价,这个比值叫做信息增益率,显然分割太细分母增加,信息增益率会降低。除此之外,其他的原理和ID3相同。
CART:分类回归树
CART是一个二叉树,也是回归树,同时也是分类树,CART的构成简单明了。
CART只能将一个父节点分为2个子节点。CART用GINI指数来决定如何分裂:
GINI指数:总体内包含的类别越杂乱,GINI指数就越大(跟熵的概念很相似)。
a. 比如出勤率大于70%这个条件将训练数据分成两组:大于70%里面有两类:【好学生】和【不是好学生】,而小于等于70%里也有两类:【好学生】和【不是好学生】。
b. 如果用分数小于70分来分:则小于70分只有【不是好学生】一类,而大于等于70分有【好学生】和【不是好学生】两类。
比较a和b,发现b的凌乱程度比a要小,即GINI指数b比a小,所以选择b的方案。以此为例,将所有条件列出来,选择GINI指数最小的方案,这个和熵的概念很类似。
CART还是一个回归树,回归解析用来决定分布是否终止。理想地说每一个叶节点里都只有一个类别时分类应该停止,但是很多数据并不容易完全划分,或者完全划分需要很多次分裂,必然造成很长的运行时间,所以CART可以对每个叶节点里的数据分析其均值方差,当方差小于一定值可以终止分裂,以换取计算成本的降低。
CART和ID3一样,存在偏向细小分割,即过度学习(过度拟合的问题),为了解决这一问题,对特别长的树进行剪枝处理,直接剪掉。
以上的决策树训练的时候,一般会采取Cross-Validation法:比如一共有10组数据:
第一次. 1到9做训练数据, 10做测试数据
第二次. 2到10做训练数据,1做测试数据
第三次. 1,3到10做训练数据,2做测试数据,以此类推
做10次,然后大平均错误率。这样称为 10 folds Cross-Validation。
比如 3 folds Cross-Validation 指的是数据分3份,2份做训练,1份做测试。