CarSim联合simulink仿真横向控制
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
目录
前言
一、知识点补充
1、车辆控制的本质
2、三个坐标系
3、符号解释
4、线速度与角速度的关系
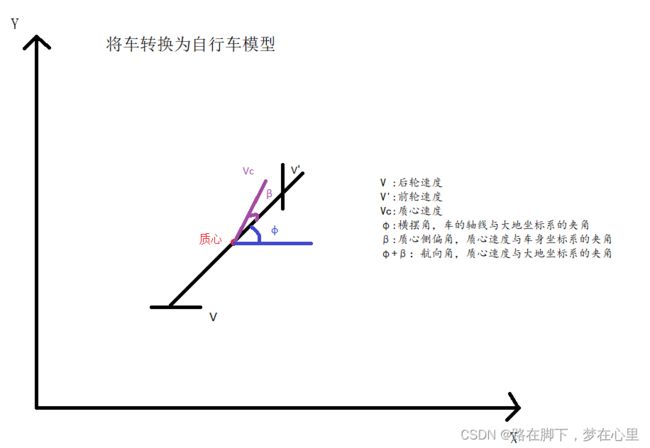
5、车辆运动学推导(手写拍照,自选)
二、横向控制知识点
1、轮胎侧偏刚度
2、车辆动力学
3、横向误差微分方程
三、算法解释
四、仿真
1、Carsim参数配置
2、procedure内容设计
3、Simulink模块解释
1、routing_planning
2、predict module
3、err/Kappa calculate module
4、计算k
5、forward_angle
6、最终模块
7、Simulink整体结构
总结
前言
自动驾驶共有六个级别,L0级是完全由驾驶员进行驾驶操作;L1级别是指特定情况下汽车能辅助驾驶员完成某些驾驶任务;L2级别是指车辆能够完成某些驾驶任务,但是驾驶员需要时刻监控周围环境的变化;L3级别是指驾驶员不需要时刻准备接管,汽车可以独立完成全部动作;L4和L5级别是完全自动驾驶技术。
提示:以下是本篇文章正文内容,下面案例可供参考
一、知识点补充
1、车辆控制的本质
纵向控制:油门/刹车----->力----->加速度----->速度----->位置
横向控制:方向盘--------->前轮转角------->横向控制
-------->航向角
2、三个坐标系
自然坐标系(Frenet坐标系),可以将纵向控制与横向控制解耦。

3、符号解释
横摆角:汽车绕垂直于地面的Z轴旋转的角度
质心侧偏角:车辆实际航向与车头指向的夹角,简单的理解就是漂移的时候就有很大的质心侧偏角
航向角:车辆航向角_百度百科 (baidu.com)
4、线速度与角速度的关系
线速度=角速度*半径
5、车辆运动学推导(手写拍照,自选)

二、横向控制知识点
1、轮胎侧偏刚度
侧偏刚度为轮胎侧偏力与侧偏角的比值:k=F/a.式中k为侧偏刚度,F为侧偏力,a为侧偏角。侧偏刚度单位为N/rad。
侧偏刚度一定是负的。
轮胎侧偏刚度_百度百科 (baidu.com) https://baike.baidu.com/item/%E8%BD%AE%E8%83%8E%E4%BE%A7%E5%81%8F%E5%88%9A%E5%BA%A6/8213379 侧偏刚度的求解:轮胎侧偏刚度的求法_努力奋斗君的博客-CSDN博客_轮胎侧偏刚度一般是多少
https://baike.baidu.com/item/%E8%BD%AE%E8%83%8E%E4%BE%A7%E5%81%8F%E5%88%9A%E5%BA%A6/8213379 侧偏刚度的求解:轮胎侧偏刚度的求法_努力奋斗君的博客-CSDN博客_轮胎侧偏刚度一般是多少
2、车辆动力学

3、横向误差微分方程

三、算法解释
1、算法输入:
整车参数:a:前轮到质心的距离;b:后轮到质心的距离;C_αf:前轮侧偏刚度;C_αr:后轮侧偏刚度;m:质量;I:偏航惯性
车辆位置与状态:x,y,φ,Vx,Vy,φ_dot
规划轨迹点:

2、算法输出:
![]()
3、算法控制过程:
step1:整车参数 + Vx 得出 A,B 设计Q,R,利用LQR 得到 k(反馈控制增益)
step2:车辆位置与状态 + 规划轨迹点 求出 真实位置在投影的曲率 和 误差e_rr
step3:step1的反馈控制增益k+step2的曲率+整车参数+Vx 求出 δ_f(前馈控制)
step4:step1+step2+step3 得到 ![]()
4、控制流程图:

四、仿真
1、Carsim参数配置

2、procedure内容设计
车辆的初始信息按照这样设计:

道路设计:

Import Channels输入参数:节气门开度、前轮转角(左)、前轮转角(右)、后轮转角(左)、后轮转角(右)

Export Channels输出参数

3、Simulink模块解释
1、routing_planning
count=1000;
[x1,y1,theta1,kr1]=straight([0,0],[20,0],0,count);
[x2,y2,theta2,kr2]=arc([20,0],[30,10],0,pi/2,count);
[x3,y3,theta3,kr3]=arc([30,10],[40,20],pi/2,0,count);
[x4,y4,theta4,kr4]=arc([40,20],[40,40],0,pi,count);
[x5,y5,theta5,kr5]=arc([40,40],[35,35],pi,3*pi/2,count);
[x6,y6,theta6,kr6]=arc([35,35],[25,35],3*pi/2,pi/2,count);
[x7,y7,theta7,kr7]=arc([25,35],[15,35],pi/2,3*pi/2,count);
[x8,y8,theta8,kr8]=arc([15,35],[5,35],3*pi/2,pi/2,count);
[x9,y9,theta9,kr9]=arc([5,35],[-15,35],pi/2,3*pi/2,count);
[x10,y10,theta10,kr10]=straight([-15,35],[-15,15],3*pi/2,count);
[x11,y11,theta11,kr11]=arc([-15,15],[0,0],3*pi/2,2*pi,count);
xr=[x1,x2,x3,x4,x5,x6,x7,x8,x9,x10,x11];
yr=[y1,y2,y3,y4,y5,y6,y7,y8,y9,y10,y11];
thetar=[theta1,theta2,theta3,theta4,theta5,theta6,theta7,theta8,theta9,theta10,theta11];
kappar=[kr1,kr2,kr3,kr4,kr5,kr6,kr7,kr8,kr9,kr10,kr11];
scatter(xr,yr);
%% 如果出现sfunction无法计算s1值的问题,可以把规划半径r加大一点(自定义的函数)
function[xr,yr,thetar,kr]=straight(init_coord,end_coord,init_angle,count)
delta_x=(end_coord(1)-init_coord(1))/(count-1);
delta_y=(end_coord(2)-init_coord(2))/(count-1);
for i=1:count
xr(i)=init_coord(1)+delta_x*i;
yr(i)=init_coord(2)+delta_y*i;
thetar(i)=init_angle;
kr(i)=0;
end
end
function[xr,yr,thetar,kr]=arc(init_coord,end_coord,init_angle,end_angle,count)
L=sqrt((init_coord(1)-end_coord(1))^2+(init_coord(2)-end_coord(2))^2);
R=L/sqrt(2*(1-cos(end_angle-init_angle))); %转弯半径
delta_angle=(end_angle-init_angle)/(count-1) ;
for i=1:count
if delta_angle>0
xr(i)=init_coord(1)-R*sin(init_angle)+R*sin(init_angle+delta_angle*(i-1));
yr(i)=init_coord(2)+R*cos(init_angle)-R*cos(init_angle+delta_angle*(i-1));
thetar(i)=init_angle+delta_angle*i;
kr(i)=1/R;
else
xr(i)=init_coord(1)+R*sin(init_angle)-R*sin(init_angle+delta_angle*(i-1));
yr(i)=init_coord(2)-R*cos(init_angle)+R*cos(init_angle+delta_angle*(i-1));
thetar(i)=init_angle+delta_angle*i;
kr(i)=-1/R; %曲率
end
end
end
注意:routing_planning 需要先运行,使得道路的的信息在工作区里面存在。
2、predict module

function [pre_x,pre_y,pre_phi,pre_vx,pre_vy,pre_phi_dot] = fcn(x,y,phi,vx,vy,phi_dot,ts)
pre_x=x+vx*ts*cos(phi)-vy*ts*sin(phi);
pre_y=y+vy*ts*cos(phi)+vx*ts*sin(phi);
pre_phi=phi+phi_dot*ts;
pre_vx=vx;
pre_vy=vy;
pre_phi_dot=phi_dot;
end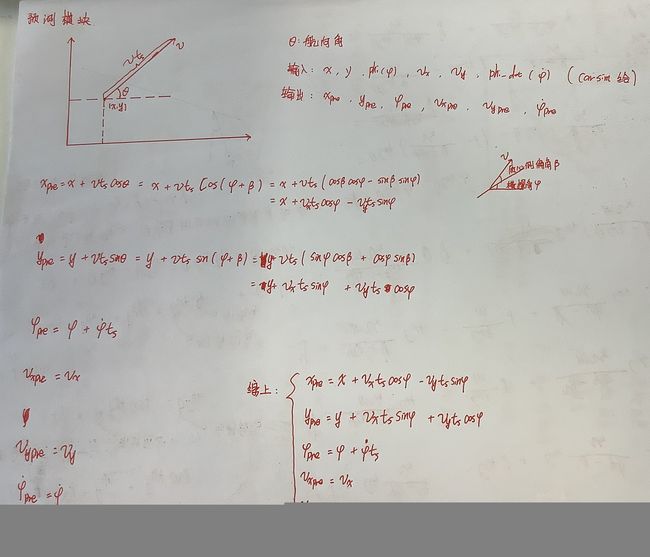
注意:Carsim输出的角度是度,MATLAB需要转换为弧度。所以上面四个增益模块输入的参数方便为:pi/180,1/3.6,1/3.6,pi/180
3、err/Kappa calculate module

function [kr,err] = fcn(x,y,phi,vx,vy,phi_dot,xr,yr,thetar,kappar)
n=length(xr);
d_min=(x-xr(1))^2+(y-yr(1))^2;
min=1;
for i=1:n
d=(x-xr(i))^2+(y-yr(i))^2;
if d输入:x,y,phi,vx,vy,phi_dot,这里量由 predict module 提供
xr,yr,thetar,kappar:由 routing_planning 提供(这就是为什么需要提前运行routing_planning原因)。
输出:误差和kappar(dmin)
代码详解:
step1:
step2:遍历![]() 找到与
找到与![]() 最近的规划点,该点的序列序列记为
最近的规划点,该点的序列序列记为![]() ;
;
step3:![]() 分别为切线向量和法线向量;
分别为切线向量和法线向量;
step4:误差距离向量
![]()
step5:![]()
step6:![]()
step7:![]() ;
;
step8:![]()
step9:![]()
step10:![]()
step11:![]()
step12:![]()
step13:输出 ![]()
注意:从工作空间把数据导入到Simulink模块的方法:(1条消息) matlab simulink 导入数据 的几种方法_dragon in sky的博客-CSDN博客_matlab数据导入simulink4https://blog.csdn.net/hk2121/article/details/104157980?ops_request_misc=&request_id=&biz_id=102&utm_term=MATLAB%E4%BB%8E%E5%B7%A5%E4%BD%9C%E7%A9%BA%E9%97%B4%E6%8A%8A%E6%95%B0%E6%8D%AE%E5%AF%BC%E5%85%A5%E5%88%B0simulink&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduweb~default-2-104157980.142%5Ev42%5Epc_ran_alice,185%5Ev2%5Econtrol&spm=1018.2226.3001.4187
4、计算k
cf=-110000;
cr=cf;
m=1412;
Iz=1536.7;
a=1.015;
b=2.910-1.015;
k=zeros(5000,4);
for i=1:5000
vx=0.01*i;
A=[0,1,0,0;
0,(cf+cr)/(m*vx),-(cf+cr)/m,(a*cf-b*cr)/(m*vx);
0,0,0,1;
0,(a*cf-b*cr)/(Iz*vx),-(a*cf-b*cr)/Iz,(a*a*cf+b*b*cr)/(Iz*vx)];
B=[0;
-cf/m;
0;
-a*cf/Iz];
Q=eye(4);
R=10;
k(i,:)=lqr(A,B,Q,R);
end
k1=k(:,1)';
k2=k(:,2)';
k3=k(:,3)';
k4=k(:,4)';注意:可以使用MATLAB自带的lqr函数,如果想了解lqr函数的内容可以在命令行空间输入“doc lqr” 调出函数的详解。
Q和R的选择(LQR控制算法及matlab/simulink仿真_陌路两立的博客-CSDN博客_lqr matlab)?
一般来说,为了方便观察各个系统状态量,Q和R选取对角阵。Q矩阵的某一个元素值增大,意味着这个元素值作用的系统状态量将以更快的速度衰减到0,比如,Q11 选取较大的值,那么 x11 将会很快衰减到0;另外一方面,R矩阵的某一个元素值增大,意味着这个元素值作用的控制量减小,控制器执行更少的动作,系统的状态衰减将变慢。所以,Q和R矩阵的选取要根据实际应用场景。
因为A,B只与整车参数和Vx有关,整车参数近似认为不变,所以每一个Vx都有唯一的一个k与之对应。

function k = fcn(k1,k2,k3,k4,vx)
if abs(vx)<0.01
k=[0,0,0,0];
else
index=round(vx/0.01); %四舍五入的函数
k=[k1(index),k2(index),k3(index),k4(index)];
end
end
求出最终的k
5、forward_angle

function forward_angle = fcn(vx,a,b,m,cf,cr,k,kr)
forward_angle=kr*(a+b-b*k(3)-(m*vx*vx/(a+b))*((b/cf)+(a/cr)*k(3)-a/(cr)));
end
为什么加入前馈控制?
若只用LQR,![]() .可以得到
.可以得到![]() ,无论k取何值,
,无论k取何值,![]() 和
和![]() 不可能同时为零
不可能同时为零
所以引入前馈控制,那么控制输入为 ![]() ,前馈控制的引入是为了消除稳态误差。
,前馈控制的引入是为了消除稳态误差。
![]() 可以得到
可以得到![]() (稳态误差),
(稳态误差),
引入前馈控制之后可以得到![]()
稳定后:![]() 可以得到
可以得到![]() ,因此通过选取合适的前馈控制角可以使得稳态误差等于0.
,因此通过选取合适的前馈控制角可以使得稳态误差等于0.
6、最终模块
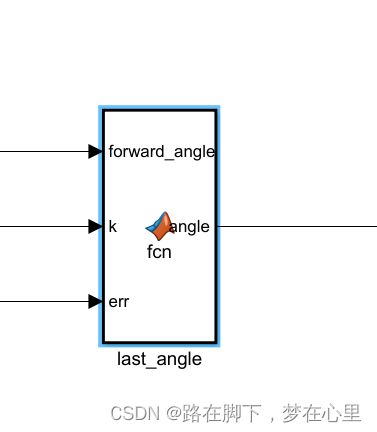
function angle = fcn(forward_angle,k,err)
angle=-k*err+forward_angle;
end7、Simulink整体结构

注意:MATLAB的角度是弧度,输入到carsim需要转换为角度,上面的k的取值均为180/pi。
总结
本文通过控制前轮转角使得实现车的横向控制,需要重点强调的是Carsim和MATLAB的角度问题。如果想了解详细的内容可以去哔哩哔哩搜老王的视频,一个很不错的up主忠厚老实的老王的个人空间_哔哩哔哩_bilibili,欢迎大家来讨论,一起在自动驾驶控制方向深耕。