目标检测中的precision, recall, AP, mAP 计算详解以及PR曲线的绘制
假设现在有这样一个测试集,测试集中的图片只由大雁和飞机两种图片组成,如下图所示:

假设你的分类系统最终的目标是:能取出测试集中所有的飞机图片,而不是大雁的图片。
现在做如下的定义:
True positive: 飞机的图片被正确地识别成了飞机;
True negative:大雁的图片没有被识别出来,系统正确地认为它是大雁;
False positive:大雁的图片被错误地识别成了飞机;
False negative:飞机的图片没有被识别出来,系统错误地认为它是大雁。
假设你的分类系统使用了上述假设,识别出了4个结果,如下图所示:
那么在识别出的这4张图片中:
True positive:有3个,画绿色框的飞机。
False positive:有1个,画红色框的大雁。
没被识别出来的6张图片中:
True negative:有4个,这4个大雁的图片,系统正确地没有把它们识别成飞机。
False negative:有2个,2个飞机没有被识别出来,系统错误地将它们识别为大雁。
Precision 和 Recall
Precision 其实就是在识别出来的图片中,true positives 所占的比例:
p r e c i s i o n = t p t p + f p = t p n precision = \frac{tp}{tp + fp} = \frac{tp}{n} precision=tp+fptp=ntp
其中 n n n代表的是(true positives + false positives),也就是系统一共识别出来多少图片。
在这一例子中,true positives 为3,false positives 为1,所以precision就是 3 1 + 3 = 0.75 \frac{3}{1+3} = 0.75 1+33=0.75。
意味着在识别出来的结果中,飞机的图片占 75 % 75\% 75%。
Recall 是被正确地识别出来的飞机个数与测试集中所有飞机个数的比值:
r e c a l l = t p t p + f n recall = \frac{tp}{tp+fn} recall=tp+fntp,通常 t p + f n tp+fn tp+fn是目标检测中 ground truth 中真实目标的数量。Recall 的分母是(true positives + false negatives),这两个值的和,可以理解为一共有多少张飞机的图片。
在这一例子中,true positives 为3,false positives 为2,那么recall 的值就是 3 3 + 2 = 0.6 \frac{3}{3+2}=0.6 3+23=0.6。意味着在所有的飞机图片中, 60 % 60\% 60%的飞机被正确地识别出来。
AP(Average Precision)
AP 是 average precision 曲线所围成的面积。具体计算可如下图所见:
这是一张预测结果框和 ground truth 边框的对比。
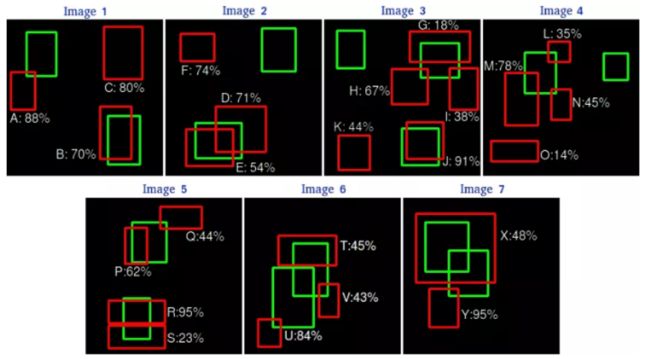
通过这张图,我们可以将每个候选框的预测信息标记出来。这里设定的 I O U > 0.5 IOU > 0.5 IOU>0.5 为 TP,否则为FP。
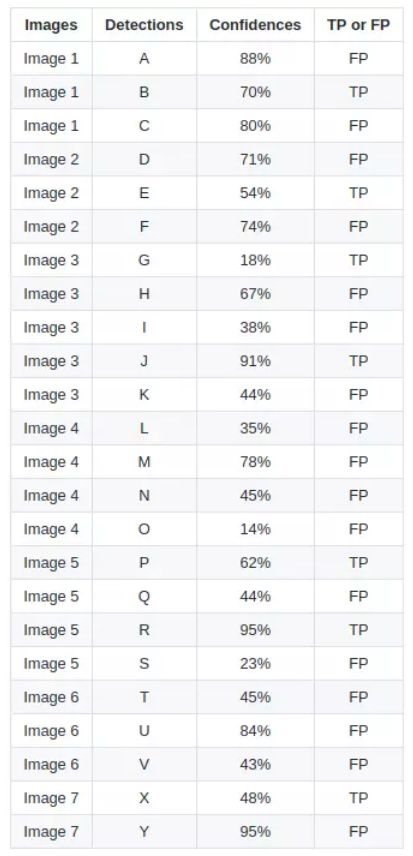
根据这张图可以画出PR曲线,按照置信度进行一次新的排序,就更加清晰明了。
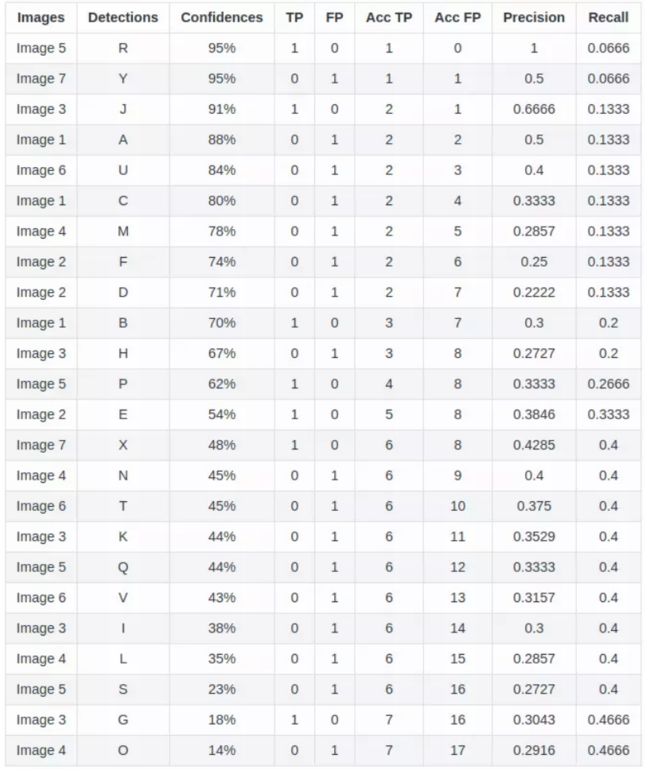
由上表,将这些(recall,precision)点标记在坐标轴中:
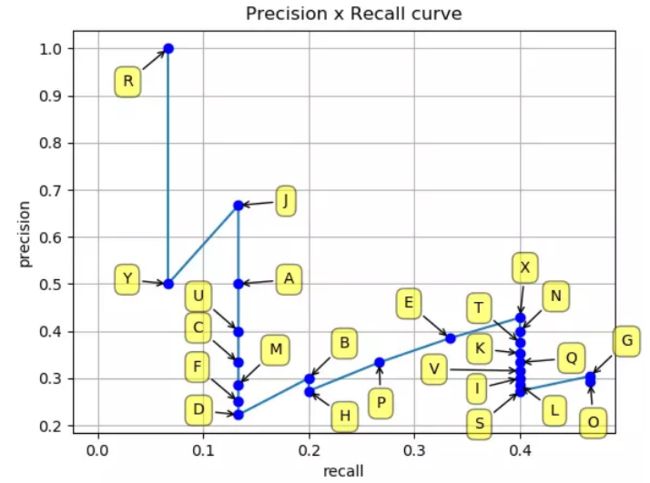
PR 曲线的绘制
这里我们用一张图片作为例子,多张图片道理一样。假设一张图片有 N N N个需要检测的目标,分别是 o b j e c t 1 , o b j e c t 2 , o b j e c t 3 object1,object2,object3 object1,object2,object3,共分为三类,使用检测器得到了 M M M个边框,每个边框里包含它所在的位置以及 o b j e c t 1 , o b j e c t 2 , o b j e c t 3 object1,object2,object3 object1,object2,object3对应的分数置信度。
- 对每一类 c c c进行如下操作:
a) 对 M M M个边框中的每一个边框,计算其与 N N N个 ground truth 的 IoU值,且取其中的最大值 M a x I o U MaxIoU MaxIoU。设定一个阈值 thresh,一般设置 t h r e s h = 0.5 thresh=0.5 thresh=0.5。
b) 当 M a x I o U < t h r e s h MaxIoU < thresh MaxIoU<thresh的时候,记录其类别的置信度得分,以及 f p c = 1 fp_c=1 fpc=1。
c) 当 M a x I o U ≥ t h r e s h MaxIoU \geq thresh MaxIoU≥thresh,分为以下两种情况:
- 当 M a x I o U MaxIoU MaxIoU对应的 ground truth 类别是 c c c时,记录其类别的分数以及 t p c = 1 tp_c=1 tpc=1。
- 当 M a x I o U MaxIoU MaxIoU对应的 ground truth 类别不是 c c c时,记录其类别的分数以及 f p c = 1 fp_c=1 fpc=1。
- 由步骤1我们可以得到 3 M 3M 3M个得分与 t p tp tp或 f p fp fp的 tuples,形如 ( c o n f , t p ) (conf, tp) (conf,tp),对这 3 M 3M 3M个tuples进行排序(从大到小)。
- 按照顺序 1 , 2 , 3 , . . . , M 1,2,3,...,M 1,2,3,...,M截取,计算每次截取所获得的recall 和 precision: r e c a l l = t p N recall = \frac{tp}{N} recall=Ntp, p r e c i s i o n = t p t p + f p precision=\frac{tp}{tp+fp} precision=tp+fptp。
这样得到 M M M个recall和precision的点,便可以画出PR曲线了。
计算AP值
由上面得到了PR曲线,即得到了 M M M个(P,R)坐标点,利用这些坐标点我们便可以计算出AP(average precision):
方法一:11点法
此处参考的是PASCAL VOC CHALLENGE的计算方法。首先设定一组阈值, [ 0 , 0.1 , 0.2 , … , 1 ] [0, 0.1, 0.2, …, 1] [0,0.1,0.2,…,1]。然后对于recall大于每一个阈值(比如 r e c a l l > 0.3 recall>0.3 recall>0.3),我们都会得到一个对应的最大precision。这样,我们就计算出了11个precision。AP即为这11个precision的平均值。这种方法英文叫做11-point interpolated average precision。;
方法二
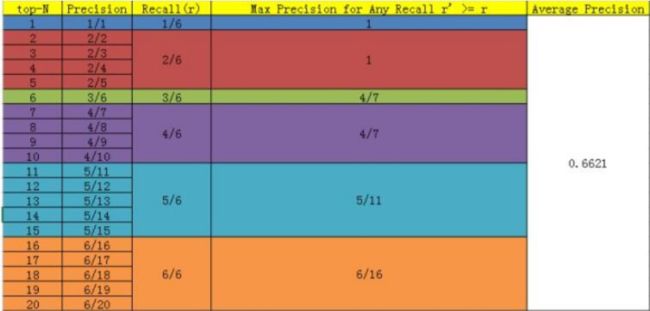
当然PASCAL VOC CHALLENGE自2010年后就换了另一种计算方法。新的计算方法假设这 N N N个样本中有 M M M个正例,那么我们会得到 M M M个recall值( 1 / M , 2 / M , … , M / M 1/M, 2/M, …, M/M 1/M,2/M,…,M/M),对于每个recall值 r r r,我们可以计算出对应( r ’ > r r’ > r r’>r)的最大precision,然后对这 M M M个precision值取平均即得到最后的AP值。
下面给出个例子方便更加形象的理解:
假设从测试集中共检测出20个例子,而测试集中共有6个正例,则PR表如下:
相应的Precision-Recall曲线(这条曲线是单调递减的)如下:

AUC和MAP之间的联系:
AUC主要考察模型对正样本以及负样本的覆盖能力(即“找的全”),而MAP主要考察模型对正样本的覆盖能力以及识别能力(即对正样本的“找的全”和“找的对”)。