无人机基于目标检测的路径规划任务
无人机目标检测相机配置
目标检测基于darknet-yolo框架,darknet用于C/C++代码实现,适用于嵌入式设备上的目标检测
更改目标检测相机
使用RGB-D相机的左摄像头而不是单目相机,修改配置如下
在indoor.launch启动文件中模型使用realsense深度相机模型
<arg name="sdf" default="$(find mavlink_sitl_gazebo)/models/iris_realsense_camera/iris_realsense_camera.sdf"/>
在~/catkin_ws/src/darknet_ros/darknet_ros/launch/task1.launch修改
<!-- <arg name="image" default="/typhoon_h480_0/cgo3_camera/image_raw" /> -->
<arg name="image" default="/iris_0/stereo_camera/left/image_raw" />
在~/catkin_ws/src/darknet_ros/darknet_ros/config/uav_0.yaml修改
# topic: /typhoon_h480_0/cgo3_camera/image_raw
topic: /iris_0/stereo_camera/left/image_raw
检测目标坐标系转换
浅析相机坐标系的相关转换
https://blog.csdn.net/qq_15029743/article/details/90215104
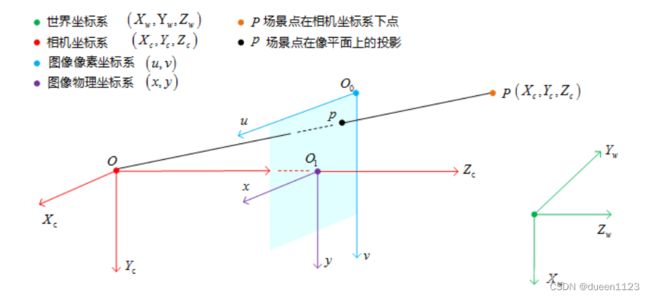
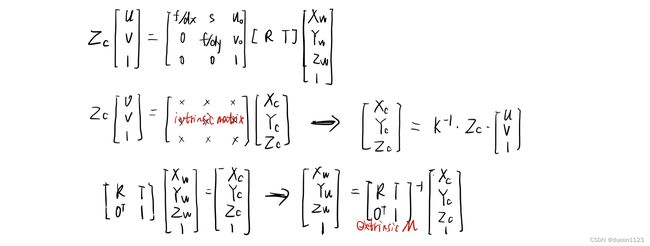
1.像素坐标系转相机坐标系
需要知道像素物理单元距离以及相机的内参矩阵

其中fx应该是f/dx,将相机的像素物理距离考虑在内
查看相机内参矩阵,camera/realsense_camera/camera_info话题,其中K为内参矩阵
intrinsic_M = np.array([[554.254691191187, 0.0, 320.5], [0.0, 554.254691191187, 240.5], [0.0, 0.0, 1.0]])
2.相机坐标系转世界坐标系
需要获得R、T矩阵
从/mavros/local_position/pose话题中获得偏移量,并转化为R T
# 构造四元数,并将之转化为旋转矩阵
q = Quaternion(data.pose.orientation.w, data.pose.orientation.x, data.pose.orientation.y, data.pose.orientation.z)
R = q.rotation_matrix
#构造平移矩阵
T = np.array([[data.pose.position.x ],[data.pose.position.y ],[data.pose.position.z ]])
3.坐标转换流程
#目标中心点的xy坐标(u,v)
u = int(u)-1
v = int(v)-1
#中心点深度值
Zc = box_ave(depth_image, u, v)
#相机内参矩阵
intrinsic_M = np.array([[554.254691191187, 0.0, 320.5], [0.0, 554.254691191187, 240.5], [0.0, 0.0, 1.0]])
# 像素坐标系
uv_M = np.array([[u],[v],[1]])
# 相机坐标系
pos_C = np.dot(np.linalg.inv(intrinsic_M), uv_M)*Zc
# print('pos_C',pos_C)
#相机坐标系ENU 有时需要将相机坐标转换为以ENU系为基准
# 世界坐标系(两种方法),经实验验证,这是以无人机为原点的ENU世界坐标系
T = np.array([[X_w],[Y_w],[Z_w]])
# pos_W = np.dot(np.linalg.inv(Rot), (pos_C_ENU - T))
pos_W = np.dot(Rot, pos_C_ENU) + T
print('pos_W',pos_W)
无人机目标检测地图配置
在forest.world文件中加入人物casual_female,在insert里面加入模型