机器视觉工业检测——相机篇1
(1)工业数字相机的分类:
工业相机按照芯片类型可以分为CCD相机、CMOS相机;
按照输出色彩可以分为单色(黑白)相机、彩色相机;
按照传感器的结构特性可以分为线阵相机(黑白摄像机、3Line彩色相机、3CCD彩色相机(分光棱镜)、面阵相机(黑白摄像机、Bayer彩色相机、3CCD彩色相机(分光棱镜);
按照输出信号方式可以分为模拟相机(PAL(黑白为CCIR))、NTSC(黑白为EIA))、数字相机(IEEE1394、USB2.0、Camera Link、GigE);
按照扫描方式可以分为隔行扫描相机、逐行扫描相机;
按照分辨率大小可以分为普通分辨率相机、高分辨率相机;
按照输出信号速度可以分为普通速度相机、高速相机;
按照响应频率范围可以分为可见光(普通)相机、红外相机、紫外相机等。
(2)相机的主要参数
相机的主要参数:
①分辨率;②速度(帧频/行频);③噪声;④曝光方式(Exposure)和快门速度(Shutter);⑤信噪比;⑥动态范围;⑦像元深度;⑧光谱响应;⑨光学接口。
①分辨率
分辨率是相机最基本的参数,由相机所采用的芯片分辨率决定,是芯片靶面排列的像元数量。
通常面阵相机的分辨率用水平和垂直分辨率两个数字表示,如:1920(H)x 1080(V),前面的数字表示每行的像元数量,即共有 1920 个像元,后面的数字表示像元的行数,即 1080 行。现在相机的分辨率通常表示多少 K,如1K(1024),2K(2048), 3K(4096)等。
在采集图像时,相机的分辨率对图像质量有很大的影响。在对同样大的视场(景物范围)成像时,分辨率越高,对细节的展示越明显。
②速度(最大帧率(Frame Rate)/行频(Line Rate))
相机的帧频/行频表示相机采集图像的频率,通常面阵相机用帧频表示,单位 fps(Frame Per second),如 30fps,表示相机在1秒钟内最多能采集 30 帧图像;线阵相机通常用行频便是单位 KHz,如 12KHz 表示相机在1秒钟内最多能采集 12000 行图像数据。
相机采集传输图像的速率,对于面阵相机一般为每秒采集的帧数(Frames/Sec.),对于线阵相机为每秒采集的行数(Lines/Sec.)。
速度是相机的重要参数,在实际应用中很多时候需要对运动物体成像。相机的速度需要满足一定要求,才能清晰准确的对物体成像。相机的帧频和行频首先受到芯片的帧频和行频的影响,芯片的设计最高速度则主要是由芯片所能承受的最高时钟决定。
③曝光方式(Exposure)和快门速度(Shutter)
对于线阵相机都是逐行曝光的方式,可以选择固定行频和外触发同步的采集方式,曝光时间可以与行周期一致,也可以设定一个固定的时间;面阵相机有帧曝光、场曝光和滚动行曝光等几种常见方式,数字相机一般都提供外触发采图的功能。
快门速度一般可到10微秒,高速相机还可以更快。
④噪声
相机的噪声是指成像过程中不希望被采集到的,实际成像目标外的信号。
根据欧洲相机测试标准EMVA1288 中,定义的相机中的噪声从总体上可分为两类:一类是由有效信号带来的符合泊松分布的统计涨落噪声,也叫散粒噪声(shot noise),这种噪声对任何相机都是相同的,不可避免,有其确定的计算公式(噪声的平方=信号的均值);第二类是相机自身固有的与信号无关的噪声,它是由图像传感器读出电路、相机信号处理与放大电路等带来的噪声,每台相机的固有噪声都不一样。另外,对数字相机来说,对视频信号进行模拟转换时会产生量化噪声,量化位数越高,噪声越低。
⑤信噪比
相机的信噪比定义为图像中信号与噪声的比值(有效信号平均灰度值与噪声均方根的比值),代表了图像的质量,图像信噪比越高,图像质量越好。(信噪比高的相机性能较好)
⑥动态范围
相机的动态范围表明相机探测光信号的范围,动态范围可用两种方法来界定,一种是光学动态范围,指饱和时最大光强与等价于噪声输出的光强的比值,由芯片的特性决定。另一种是电子动态范围,是指饱和电压和噪声电压之间的比值。
对于固定相机其动态范围是一个定值,不随外界条件变化而变化。在线性响应处,相机的动态范围定义为饱和曝光量与噪声等效曝光量的比值:

动态范围可用倍数、dB 或 Bit 等方式来表示。动态范围大,则相机对不同的光照强度有更强的适应能力。
⑦像元/像素深度
数字相机输出的数字信号,即像元灰度值,具有特殊的比特位数,称为像元深度。即每像素数据的位数,一般常用的是8Bit,对于数字相机机一般还会有10Bit、12Bit、14Bit等。
对于黑白相机这个值的方位通常是 8-16bit。像元深度定义了灰度由暗道亮的灰阶数。例如,对于 8bit 的相机 0 代表全暗而 255代表全亮。介于 0 和 255 之间的数字代表一定的亮度指标。10bit 数据就有 1024 个灰阶,而 12bit 有 4096 个灰阶。每一个应用我们都要仔细考虑是否需要非常细腻的灰度等级。从 8bit 上升到 10bit 或者 12bit 的确可以增强测量的精度,但是也同时降低了系统的速度,并且提高了系统集成的难度(线缆增加,尺寸变大),因此我们也要慎重选择。
⑧光谱响应
光谱响应是指相机对于不同波长光线的响应能力,通常指其所采用芯片的光谱响应。通常用光谱曲线表示,横轴表示不同波长,纵轴表示量子效率。按照响应光谱不同也把相机分为可见光相机(400nm—1000nm,峰值在 500nm—600nm 之间),红外相机(响应波长在 700nm 以上),紫外相机(可以响应到 200nm—400nm的短波),我们需要根据接收被测物发光波长的不同来选择不同的光谱响应的相机。
⑨光学接口/接口类型
光学接口是指相机与镜头之间的借口,常用的镜头的借口有 C 口,CS 口,F 口。下表提供了关于镜头安装及后焦距的信息。其中 M42 镜头适配器源于高端摄像标准。另一方面,相机的 Z 轴均依据所提供的适配器而进行了优化,一般情况下不要轻易拆卸镜头适配器。

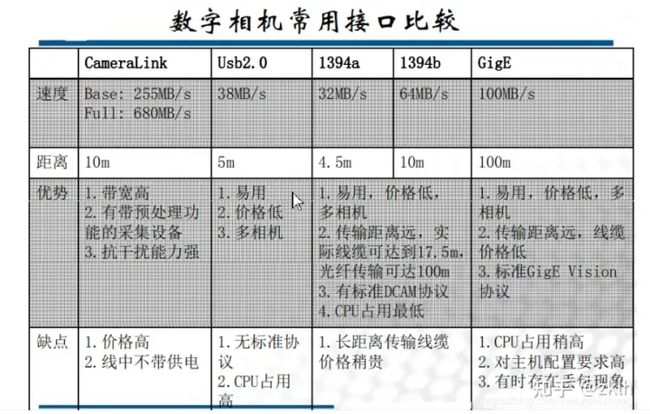
(3)工业数字摄像机主要接口类型
主要有:Usb2.0、IEEE 1394、CameraLink、GiggE。