51单片机 多机串口通讯实验与双机串口通讯实验及proteus仿真
51单片机 多机串口通讯实验与双机串口通讯实验及proteus仿真
文章目录
- 51单片机 多机串口通讯实验与双机串口通讯实验及proteus仿真
- 实验内容
- 一、实验一 多机串口通讯实验 数码管显示
-
- 1.仿真图
- 2.代码
- 二、实验二 双机串口通讯实验 LCD显示
-
- 1.仿真图
- 2.代码
- 总结
实验内容
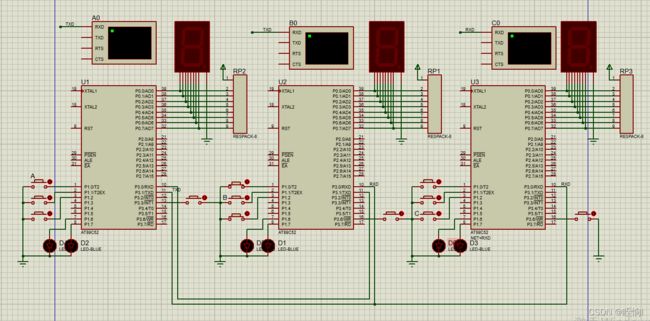
串口通讯实验,设计一个甲、乙、丙多机通信实验,甲机发送数据给乙机,乙机收到后反馈一个内容给甲机,甲机收到反馈内容再加上原来发送内容再发给到乙机,乙机收到信息,进行确认对比,内容正确就在显示终端显示相应内容,三个收发端都可以按照此方式收发。当甲机连续通过按键发送同一个内容三次,就对三个收发端的数码管清零。
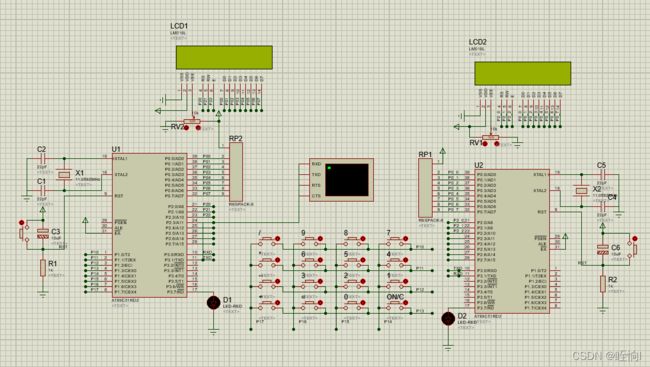
从一个单片机发送5个给另一个单片机,另一个单片机接收到后完成数据相加,并通过数码管显示出来,要求所有数据为十进制格式。
一、实验一 多机串口通讯实验 数码管显示
1.仿真图
2.代码
#include二、实验二 双机串口通讯实验 LCD显示
1.仿真图
2.代码
/** 功能描述: 甲机发数据!”**/
#include 总结
大佬们,可以支持一下。谢谢!!!
实验一 多机串口通讯实验 数码管显示
实验二 双机串口通讯实验 LCD显示