LeGO-LOAM源码解析1 : 算法整体框架和utility.h
算法整体框架和utility.h解析
- 一、算法框架与流程
- 二、utility.h分析
loam源码地址:https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.
论文学习:【论文阅读】LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain.
LeGO-LOAM源码解析汇总:
一、算法框架与流程

回顾论文,我们可以将整个代码的流程分为10HZ点云输入部分、五个处理部分和10HZ位姿估计输出部分。五个处理部分由点云分割、特征提取、高频激光里程计、低频激光建图和变换融合组成。
在代码中包含imageProjection、featureAssociation、mapOptmization、transformFusion四个cpp文件和一个头文件:utility.h。
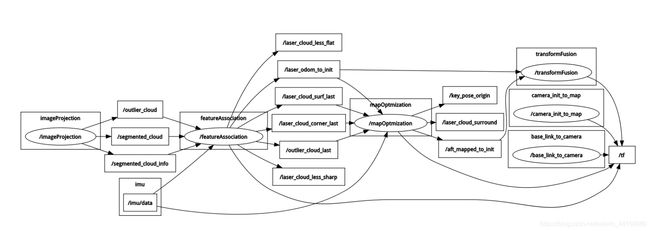
通过对节点和话题关系图的查看,我们可以大概看出代码的执行逻辑如下:
所以我们的代码分析也会按照这个逻辑逐一展开。在这里提供一份大佬注释好的LeGo-LOAM的代码,链接如下: https://github.com/wykxwyc/LeGO-LOAM_NOTED。接下来我们的工作都会以这个为基础展开。
二、utility.h分析
utility.h作为代码中唯一的头文件,它的意义在于定义一些基本的使用变量和结构体。
首先为了简化代码,将常用的带强度信息的点云类型pcl::PointXYZI定义为PointType
typedef pcl::PointXYZI PointType;
定义点云和imu的话题名称:
extern const string pointCloudTopic = "/velodyne_points";
extern const string imuTopic = "/imu/data";
在新的代码中作者提供了CloudRing 的使用标志以帮助进行点云投影(如 VLP-32C、VLS-128)。 Velodyne 点云具有“环”通道,可直接给出范围图像中的点行 id。 其他激光雷达可能具有相同类型的通道,即 Ouster 中的“r”。 如果您使用的是非 Velodyne 激光雷达,但它具有类似的“环形”通道,则可以更改 Utility.h 中的 PointXYZIR 定义和 imageProjection.cpp 中的相应代码:
extern const bool useCloudRing = true; // if true, ang_res_y and ang_bottom are not used
接下来作者提供了多种类型激光雷达的使用配置如VLP-16、HDL-32E、VLS-128、Ouster OS1-16等等,默认使用VLP-16。具体注释如下:
// VLP-16
//激光线束
extern const int N_SCAN = 16;
//水平方向激光点 360/水平分辨率
extern const int Horizon_SCAN = 1800;
//水平分辨率
extern const float ang_res_x = 0.2;
//垂直分辨率
extern const float ang_res_y = 2.0;
//与与水平方向的夹角
extern const float ang_bottom = 15.0+0.1;
//扫描到地面的激光线数
extern const int groundScanInd = 7;
// HDL-32E
// extern const int N_SCAN = 32;
// extern const int Horizon_SCAN = 1800;
// extern const float ang_res_x = 360.0/float(Horizon_SCAN);
// extern const float ang_res_y = 41.33/float(N_SCAN-1);
// extern const float ang_bottom = 30.67;
// extern const int groundScanInd = 20;
默认关闭回环:
extern const bool loopClosureEnableFlag = false;
建图处理时间间隔,只有时间间隔大于这个值才能进行建图优化:
extern const double mappingProcessInterval = 0.3;
处理频率0.1s(10HZ)及IMU队列长度
extern const float scanPeriod = 0.1;
extern const int systemDelay = 0;
extern const int imuQueLength = 200;
点云分割的一些设置:
extern const float sensorMinimumRange = 1.0;
extern const float sensorMountAngle = 0.0;
//点云分割的跨度60度,在imageProjection中用于判断平面
extern const float segmentTheta = 60.0/180.0*M_PI; // decrese this value may improve accuracy
//检查上下左右连续5个点做为分割的特征依据
extern const int segmentValidPointNum = 5;
extern const int segmentValidLineNum = 3;
extern const float segmentAlphaX = ang_res_x / 180.0 * M_PI;
extern const float segmentAlphaY = ang_res_y / 180.0 * M_PI;
特征点选取的一些设置:
//点特征数
extern const int edgeFeatureNum = 2;
//面特征数
extern const int surfFeatureNum = 4;
//总特征数
extern const int sectionsTotal = 6;
extern const float edgeThreshold = 0.1;
extern const float surfThreshold = 0.1;
//特征选取间隔
extern const float nearestFeatureSearchSqDist = 25;
建图参数:
//选取关键帧的范围(不使用回环)
extern const float surroundingKeyframeSearchRadius = 50.0; // key frame that is within n meters from current pose will be considerd for scan-to-map optimization (when loop closure disabled)
//子图关键帧数目(使用回环)
extern const int surroundingKeyframeSearchNum = 50; // submap size (when loop closure enabled)
// history key frames (history submap for loop closure)
//考虑回环成立的阈值
extern const float historyKeyframeSearchRadius = 7.0; // key frame that is within n meters from current pose will be considerd for loop closure
//回环子图的构建关键帧数目2n+1
extern const int historyKeyframeSearchNum = 25; // 2n+1 number of hostory key frames will be fused into a submap for loop closure
extern const float historyKeyframeFitnessScore = 0.3; // the smaller the better alignment
extern const float globalMapVisualizationSearchRadius = 500.0; // key frames with in n meters will be visualized
自定义 PointTypePose类型指的是具备姿态角的特定点:
struct PointXYZIRPYT
{
// 该点类型有4个元素
PCL_ADD_POINT4D
PCL_ADD_INTENSITY;
float roll;
float pitch;
float yaw;
double time;
// 确保new操作符对齐操作
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16;// 强制SSE对齐
POINT_CLOUD_REGISTER_POINT_STRUCT (PointXYZIRPYT,
(float, x, x) (float, y, y)
(float, z, z) (float, intensity, intensity)
(float, roll, roll) (float, pitch, pitch) (float, yaw, yaw)
(double, time, time)
)
typedef PointXYZIRPYT PointTypePose;