Pytorch入门之CNN和七大CNN网络
CNN的介绍我就不写了,基本的都知道,用于处理图像语音的一种神经网络。在全连接层的基础上,增加了卷积层和池化层。
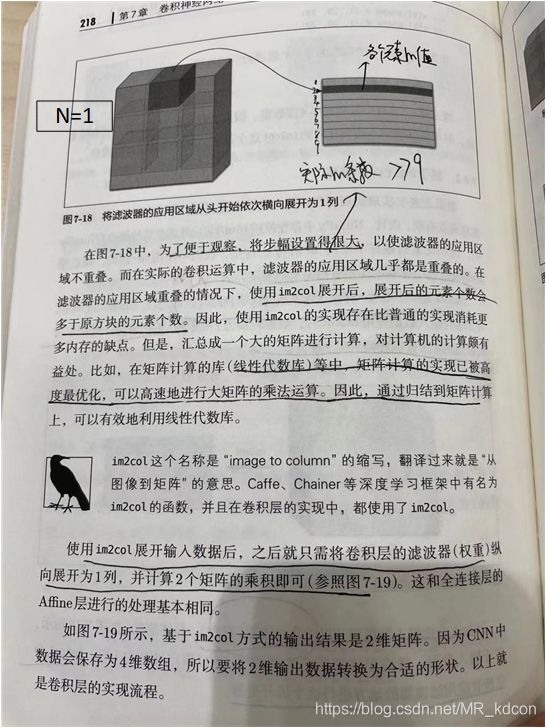
关于卷积层和池化层填充系数padding的计算公式,两者都是都是用一个核(窗口)去处理,卷积核是为了取得图像的信息,包含了网络的学习参数,池化层是为了突出图像重要信息和缩小图像规模(分为最大池化和平均池化),不含学习参数,但两者的计算模式都是一个窗口计算得到1个值,故计算模式是相同的。
需要注意的是,Pytorch中的nn.Conv2d和nn.Maxpool中的padding系数是指填充一边的值,计算公式如下:

而其他参数值:输入通道、输出通道、窗口大小、步长都是超参数,(虽然padding也是)。
关于卷积池化的反向传播https://blog.csdn.net/qq_21578849/article/details/94667699
如下图所示,CNN中的张量都是四维的
对卷积来说
输入(N,C,H,W)->卷积核(FN,C,Hk,Wk)->输出(N,FN,Hp,Wp)
bias:(FN,1,1)
对于卷积的内部细节,如下图,不细说了
对于池化:
另外补充一点:池化层不改输入输出的通道数。
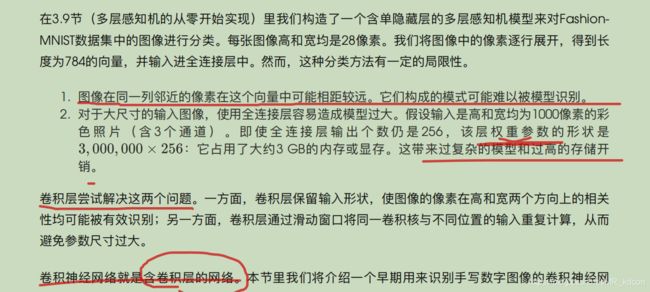
CNN比传统利用FC处理图像分类的优势
五大网络
1、LeNet

class LeNet(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5, stride=1, padding=0), # (1, 32 32)->(6, 28 28)
nn.Sigmoid(), # (6, 28 28)->(6 28 28)
nn.MaxPool2d(kernel_size=2) # (6, 28 28)->(6 14 14)
)
self.conv2 = nn.Sequential(
nn.Conv2d(6, 16, 5, 1, 0), # (6, 14 14)->(16 10 10)
nn.Sigmoid(), # (6, 10 10)->(16 10 10)
nn.MaxPool2d(2) # (16, 10 10)->(16 5 5)
)
self.fc = nn.Sequential(
nn.Linear(16*5*5, 120),
nn.Sigmoid(),
nn.Linear(120, 84),
nn.Sigmoid(),
nn.Linear(84, 10)
)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
out = self.fc(x.view(x.shape[0], -1))
return out
net = LeNet()
print(net)
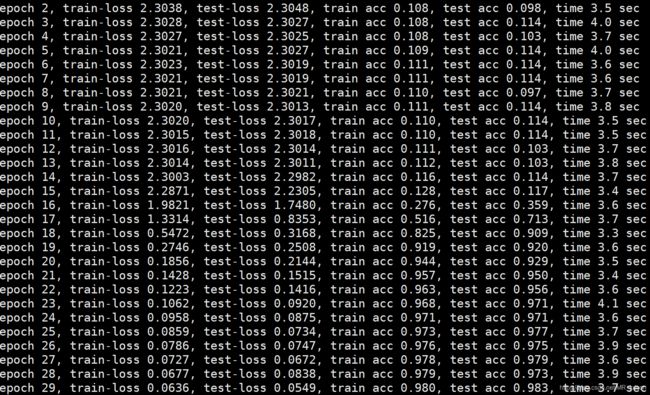
做CNN要有耐心,数据的拟合要慢慢来。
2、AlexNet
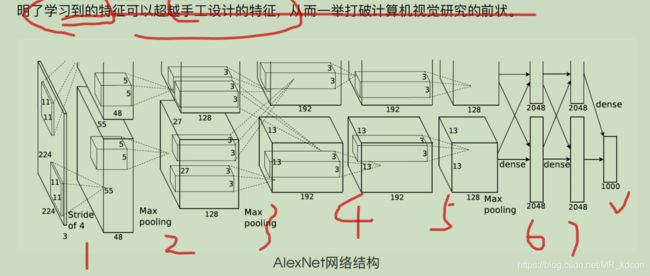
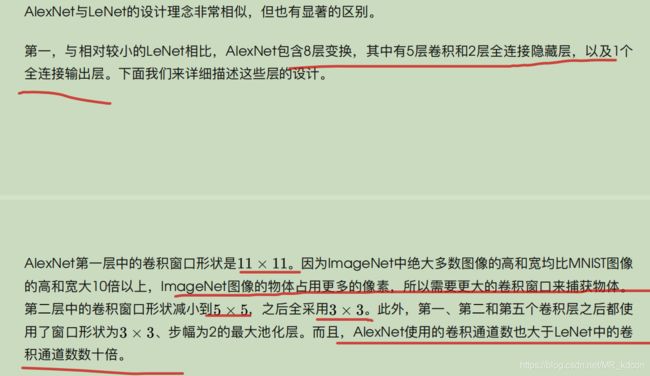
Alexnet是浅层网络与深层网络的分界线。
Alexnet类
class AlexNet(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels=1, out_channels=96, kernel_size=11, stride=4, padding=0), #(1 227 227)->(96 55 55)
nn.ReLU(), # (96 55 55)->(96 55 55)
nn.MaxPool2d(kernel_size=3, stride=2) # (96 55 55)->(96 27 27)
)
self.conv2 = nn.Sequential(
nn.Conv2d(96, 256, 5, 1, 2), # (96, 27 27)->(256 27 27)
nn.ReLU(), # (256 27 27)->(256 27 27)
nn.MaxPool2d(3, 2) # (256 27 27)->(256 13 13)
)
self.conv3 = nn.Sequential(
nn.Conv2d(256, 384, 3, 1, 1), # (256 13 13)->(384 13 13)
nn.ReLU(), # (384 13 13)->(384 13 13)
)
self.conv4 = nn.Sequential(
nn.Conv2d(384, 384, 3, 1, 1), # (384 13 13)->(384 13 13)
nn.ReLU(), # (384 13 13)->(384 13 13)
)
self.conv5 = nn.Sequential(
nn.Conv2d(384, 256, 3, 1, 1), # (384 13 13)->(256 13 13)
nn.ReLU(), # (256 13 13)->(256 13 13)
nn.MaxPool2d(3, 2) # (256 13 13)->(256 6 6)
)
self.fc = nn.Sequential(
nn.Linear(256*6*6, 4096),
nn.Dropout(0.2),
nn.ReLU(),
nn.Linear(4096, 4096),
nn.Dropout(0.5),
nn.ReLU(),
nn.Linear(4096, 10)
)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
x = self.conv4(x)
x = self.conv5(x)
out = self.fc(x.view(x.shape[0], -1))
return out
net = AlexNet()
print(net)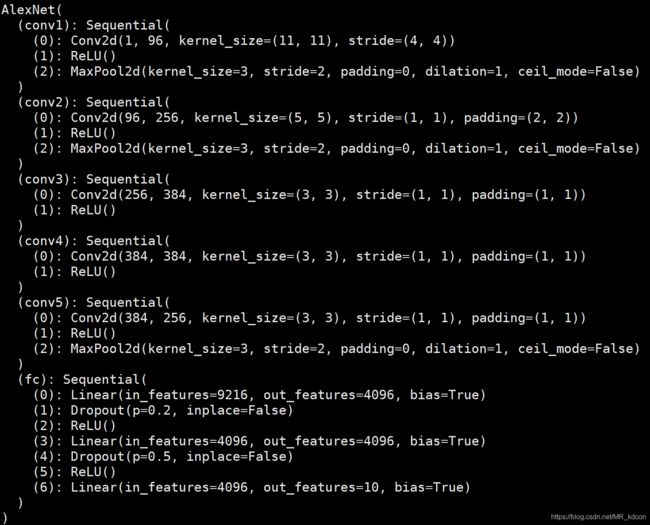
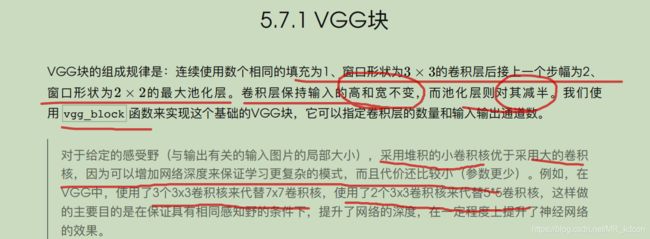
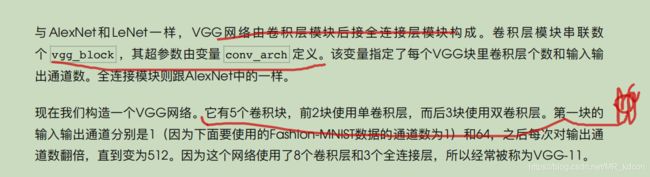
3、VGG(主要介绍VGG11)
使用简单的基础块来实现网络
感知野说明:
感知野计算公式:
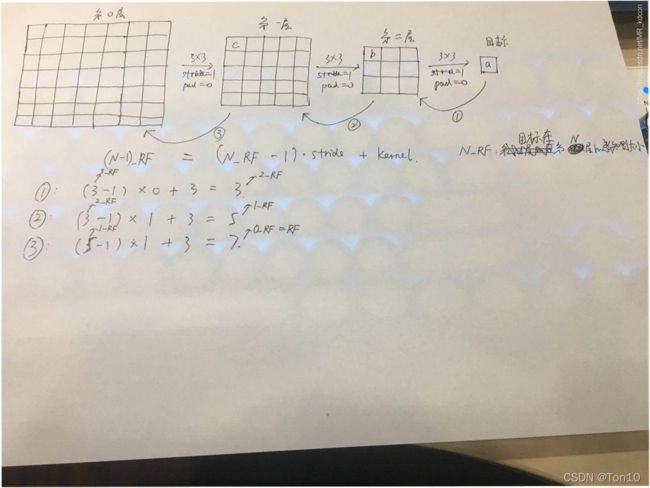
感知野计算参考:点这里。
每一个vgg块都返回一个容器。
class Vgg11(nn.Module):
def __init__(self):
super().__init__()
self.vgg = nn.Sequential()
for i, (num_convs, in_channels, out_channels) in enumerate(Vgg11block_size):
self.vgg.add_module('vggblock'+str(i), d2l.vgg_block(num_convs, in_channels, out_channels))
self.vgg.add_module('fc', nn.Sequential(
d2l.FlattenLayer(),
nn.Linear(512*7*7, 4096),
nn.Dropout(0.3),
nn.ReLU(),
nn.Linear(4096, 4096),
nn.Dropout(0.5),
nn.ReLU(),
nn.Linear(4096, 10))
)
def forward(self, x):
out = self.vgg(x)
return out
net = Vgg11()
print(net)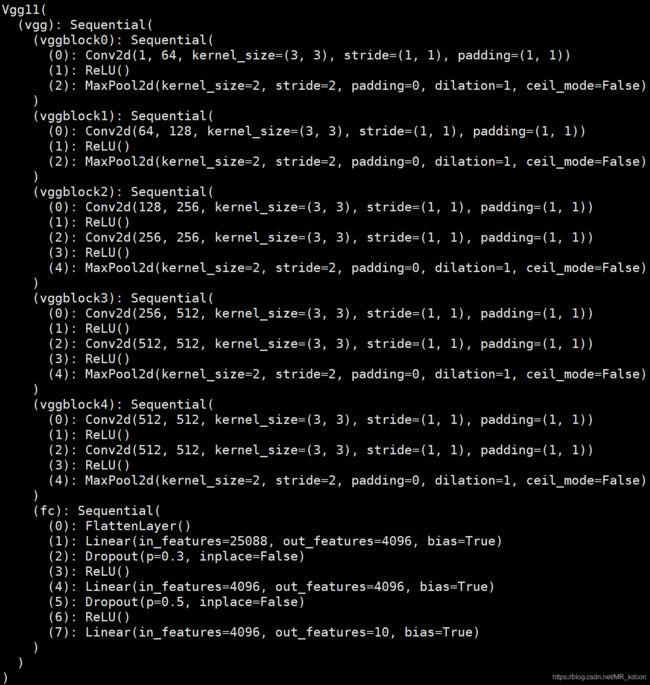
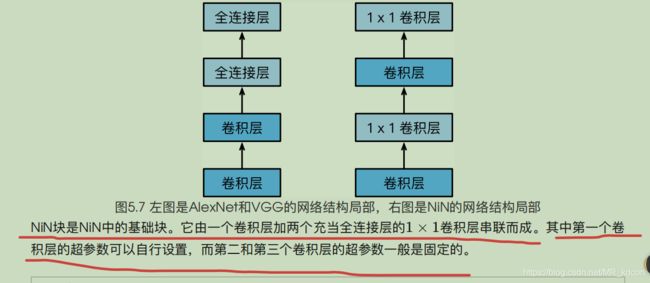
4、NiN
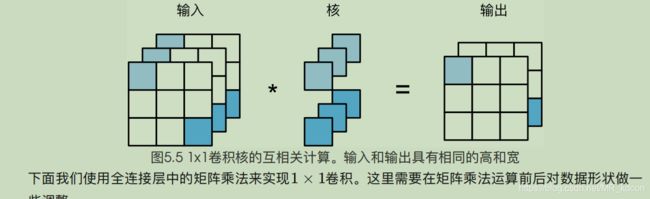
NiN是网络中的网络,即每个nin块都是一个卷积层+全连接层(用1*1卷积层替代)的小网络


也是和VGG一样,采用块的思想,使用nin块

net = nn.Sequential(
d2l.nin_block(1, 96, 11, 4, 0), # (1, 224, 224)->(96, 55, 55)
nn.MaxPool2d(3, 2), # (96, 55, 55)->(96, 27, 27)
d2l.nin_block(96, 256, 5, 1, 2), # (96, 27, 27)->(256, 27, 27)
nn.MaxPool2d(3, 2), # (256, 27, 27)->(256, 13, 13)
d2l.nin_block(256, 384, 3, 1, 1), # (256, 13, 13)->(384, 13, 13)
nn.MaxPool2d(3, 2), # (384, 13, 13)->(384, 6, 6)
nn.Dropout(0.5),
d2l.nin_block(384, 10, 3, 1, 1), # (384, 6, 6)->(10, 6, 6)
d2l.GlobalAvgPool2d(), # (10, 6, 6)->(10, 1, 1)
d2l.FlattenLayer() # (10, 1, 1)->(10)
)
print(net)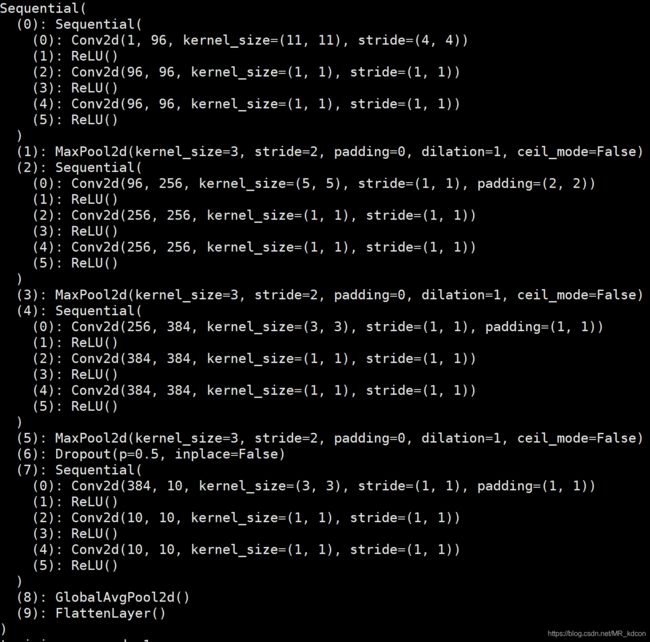
5、Googlenet
采用了NIN中网络串联网络的思想
但不是nin块,而是inception块
采用5个模块

class Googlenet(nn.Module):
def __init__(self):
super(Googlenet, self).__init__()
self.b1 = nn.Sequential(
nn.Conv2d(in_channels=1, out_channels=64, kernel_size=7, stride=2, padding=3), # (1,227,227)->(64,114,114)
nn.ReLU(),
nn.MaxPool2d(2) # (64,114,114)->(64,57,57)
)
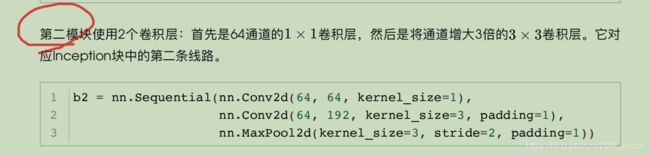
self.b2 = nn.Sequential(
nn.Conv2d(64, 64, kernel_size=1), # (64,114,114)->(64,114,114)
nn.ReLU(),
nn.Conv2d(64, 64*3, kernel_size=3, padding=1), # (64,114,114)->(192,114,114)
nn.ReLU(),
nn.MaxPool2d(3, 2, 1) # (192,57,57)->(192,29,29)
)
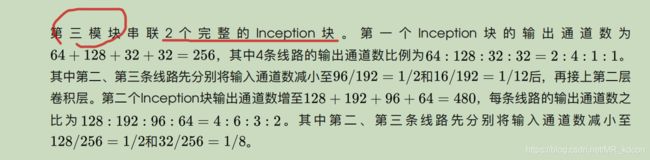
self.b3 = nn.Sequential(
d2l.Inception(192, 64, (96, 128), (16, 32), 32), # (192,29,29)->(256,29,29)
d2l.Inception(256, 128, (128, 192), (32, 96), 64), # (256,29,29)->(480,29,29)
nn.MaxPool2d(3, 2, 1) # (480,29,29)->(480,15,15)
)
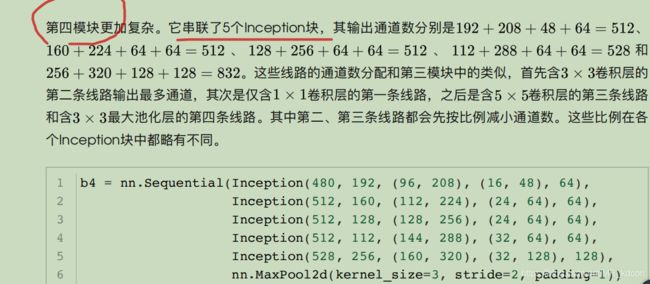
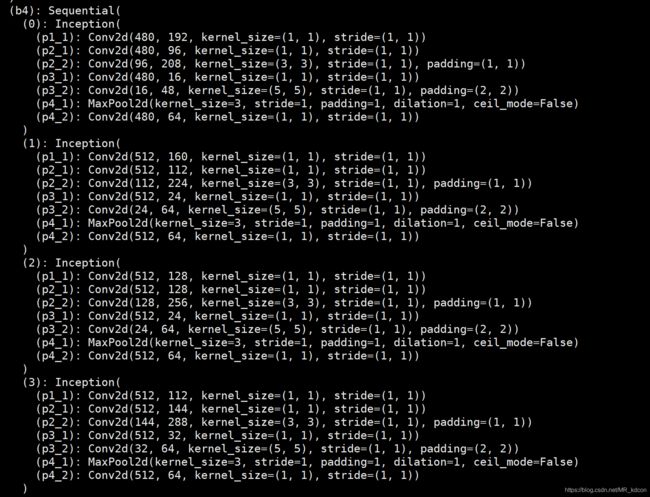
self.b4 = nn.Sequential(
d2l.Inception(480, 192, (96, 208), (16, 48), 64), # (480,15,15)->(512,15,15)
d2l.Inception(512, 160, (112, 224), (24, 64), 64), # (512,15,15)->(512,15,15)
d2l.Inception(512, 128, (128, 256), (24, 64), 64), # (512,15,15)->(512,15,15)
d2l.Inception(512, 112, (144, 288), (32, 64), 64), # (512,15,15)->(528,15,15)
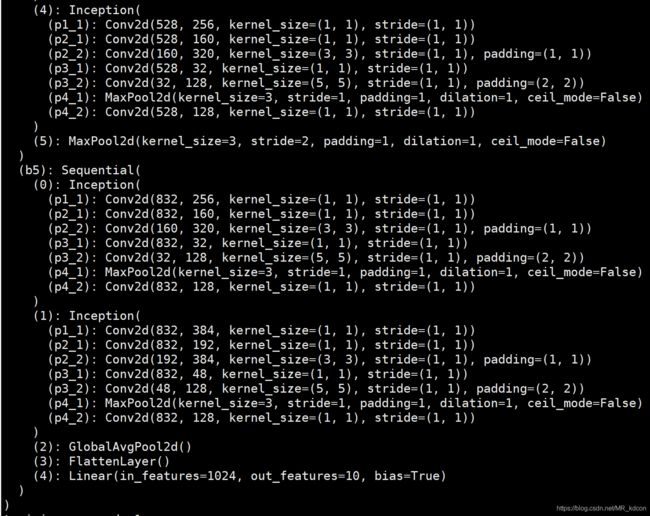
d2l.Inception(528, 256, (160, 320), (32, 128), 128), # (528,15,15)->(832,15,15)
nn.MaxPool2d(3, 2, 1) # (832,15,15)->(832,8,8)
)
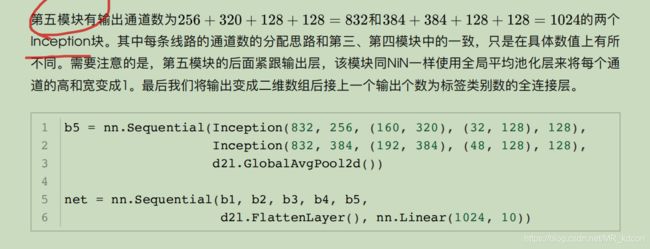
self.b5 = nn.Sequential(
d2l.Inception(832, 256, (160, 320), (32, 128), 128), # (832,8,8)->(832,8,8)
d2l.Inception(832, 384, (192, 384), (48, 128), 128), # (832,8,8)->(1024,8,8)
d2l.GlobalAvgPool2d(), # (1024,8,8)->(1024,1,1)
d2l.FlattenLayer(),
nn.Linear(1024*1*1, 10)
)
def forward(self, x):
x = self.b1(x)
x = self.b2(x)
x = self.b3(x)
x = self.b4(x)
out = self.b5(x)
return out
net = Googlenet()
print(net) 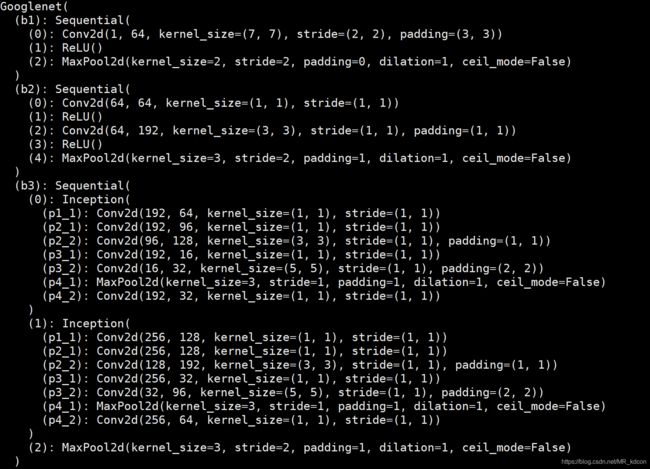
小结:
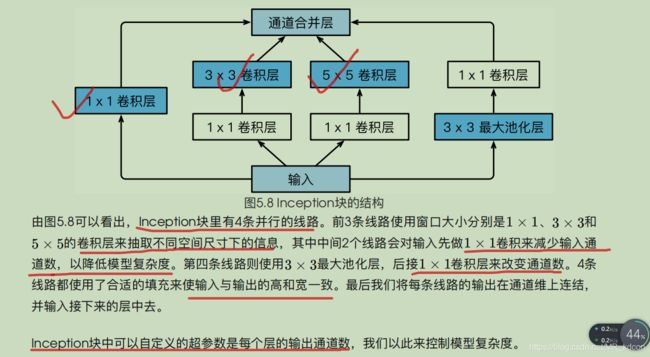
1、Inception块是有一个4条线路的子网络,使用不同窗口形状的卷积层和池化层并行抽取特征信息,并使用 卷积层来减少通道数从而降低模型复杂度。
卷积层来减少通道数从而降低模型复杂度。
2、GoogleNet就是将多个Inception块和其他层串联起来。
3、GoogleNet是一种计算复杂度较低、计算效率相对较高的模型之一。
6、残差网络Resnet
功能:网络深度变深以后的性能退化问题
这个网络和googlenet大体结构有点类似,由大神何凯明发明的一种实用网络,其实说白了就是普通的网络上面的插入跳跃结构。 但是他的思想特别值得去研究。
网络的宽度和深度可以很好的提高网络的性能(但也加大了梯度爆炸和梯度消失的概率),网络越深,能获取的信息越多,而且特征也越丰富,深的网络一般都比浅的的网络效果好
深的网络A和一个浅的网络B,那A的性能至少都能跟B一样。因为就算我们把A的网络参数全部迁移到B的前面几层,而B后面的层只是做一个等价的映射,就达到了A网络的一样的效果。因此,无论是trainingerror还是testingerror,深层网络都是碾压浅层网络。
But,当网络层数达到一定的数目以后,网络的性能就会饱和,再增加网络的性能就会开始退化,因为我们发现训练精度和测试精度都在下降,这说明当网络变得很深以后,深度网络就变得难以训练了。
但是这种退化并不是由过拟合引起的,而是梯度消失、爆炸。层数较少的时候,可以使用BN,但更深网络,BN就不适用了
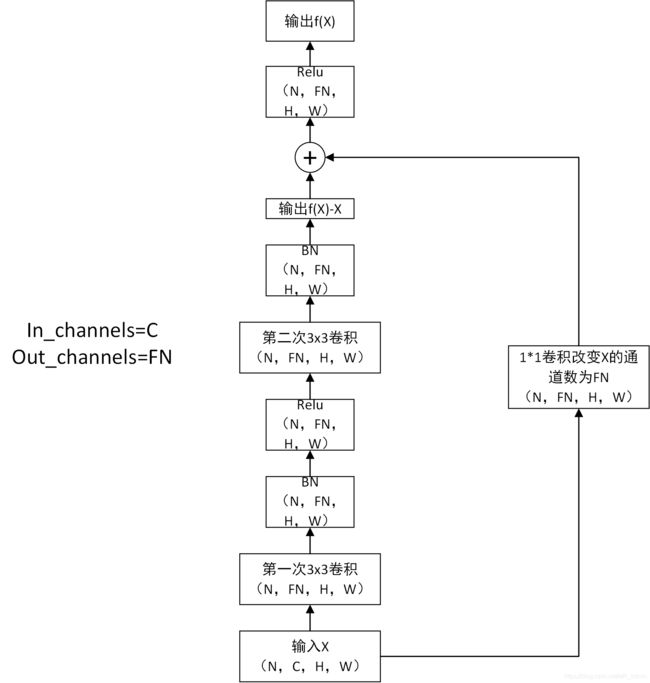
残差块有2种结构:

具体为:
残差块的实现
class Residual(nn.Module):
def __init__(self, in_channels, out_channels, use_1x1conv=False, stride=1):
super(Residual, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1, stride=stride)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
return F.relu(Y + X)残差网络的引出:
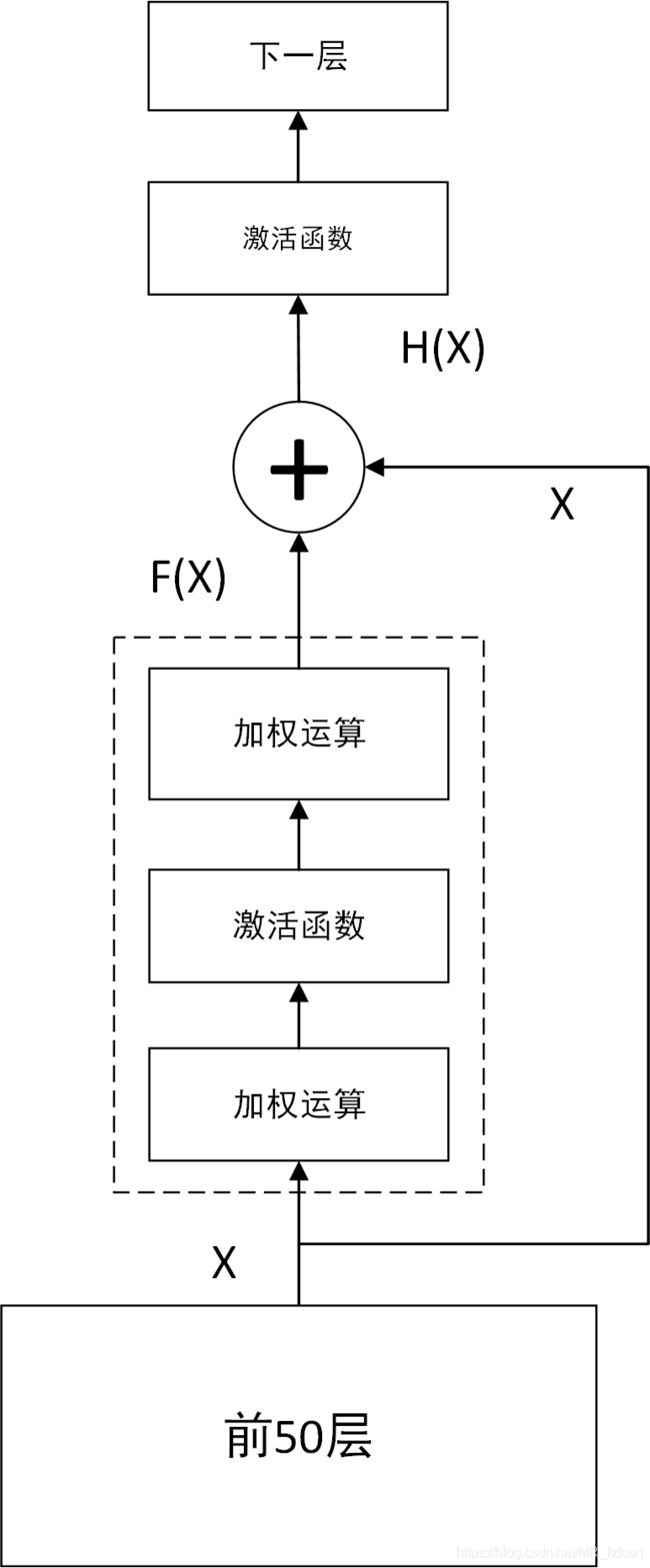
首先,如上图所示,前50层已经可以达到最优的Loss,如果继续加下一层,会导致深度饱和,反而会降低总体性能。此时我们就希望下一层的输入和输出之间是恒等映射,即输出=输入。即H(X)=X。但这不好优化出来。故先引入残差,即观测值H(a)与估计值a(为第51层输入或第50层的输出)的差值。统一写成残差映射F(X)=H(X)-X。故H(X)=F(X)+X。那我们的目标就是让残差映射为0,这样的优化更容易,因为只需要让上图残差块中最后一级加权运算的(W,b)学成0即可。如此一来H(X)=X,通过转移优化目标,我们实现了网络的加深与拒绝性能下降共存。
接下来来看下这个帅气的resnet,结构挺好理解的,关键就是以残差块为基础

总结:
7、稠密网络DenseNet
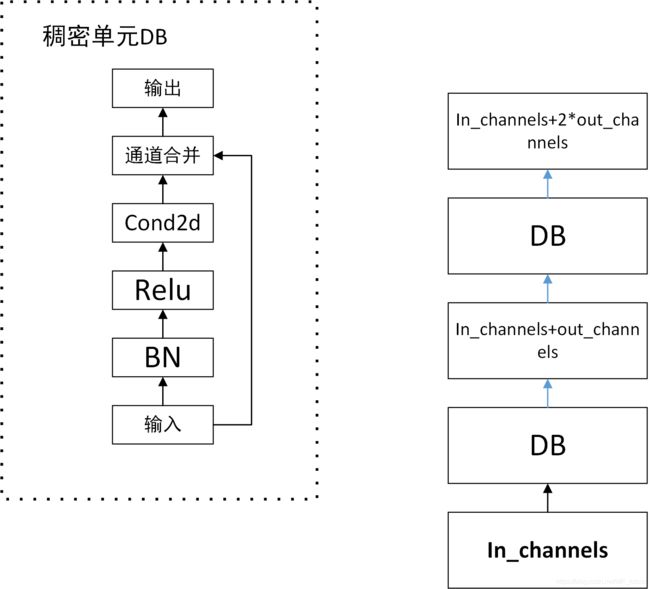
如右图所示,这人是一个稠密块,可以设置n个卷积层。
与残差网络不同的是,每个单元最后是通道合并,而不是直接相加。
# 稠密块
def dense(in_channels, out_channels):
blk = nn.Sequential(
nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=1)
)
return blk
class Dense_block(nn.Module):
def __init__(self, in_channels, out_channels, num_dense):
super().__init__()
net = []
for i in range(num_dense):
mid_channels = in_channels + i * out_channels
net.append(dense(mid_channels, out_channels))
self.dence_block = nn.ModuleList(net)
self.final_channels = in_channels + num_dense * out_channels
def forward(self, X):
for blk in self.dence_block:
Y = blk(X)
X = torch.cat((X, Y), dim=1)
return X由于每个稠密块会带来通道数的增加,会增加model的复杂度。故每个稠密块后需要添加过渡层去控制:1*1卷积层、平均池化层减小图像的高和宽。
def transform_dense(in_channels, out_channels):
blk = nn.Sequential(
nn.BatchNorm2d(in_channels),
nn.ReLU(),
nn.Conv2d(in_channels, out_channels, 1),
nn.AvgPool2d(2, 2)
)
return blk各个网络的内部细节已经在代码中,接下来总结优缺点
Lenet
优点:
交替使用2层卷积层和2层池化层,最后接3层FC来分类。
速度很快
缺点:
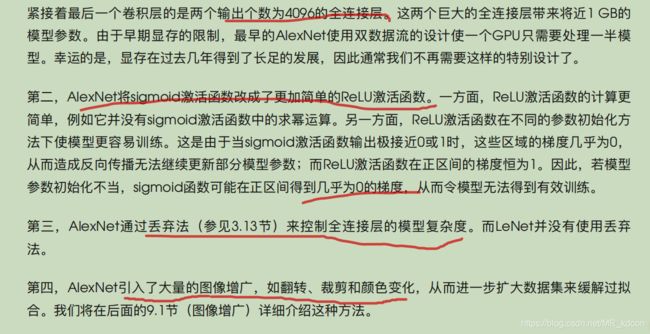
使用了sigmoid作为激活函数,会导致梯度消失
网络深度低
Alexnet
优点:
使用5层卷积层抽取图像特征,3层池化层,2层FC的复杂网络更大参数空间,比Lenet有更强的分类能力。
使用Relu激活函数。使用Dropout层。引入图像增广
使用多层卷积池化层来加深网络
缺点:
速度慢。没有提供简单的规则指导如何设计网络
Vggnet
优点:使用简单的基础块来加深网络,块采用堆积的小卷积核比Alexnet大的卷积核可以有更大的深度,包括网络深度(因为卷积通常会缩小图片大小,导致网络深度有限,而小的卷积核可以有更大的深度空间去继续操作)和通道深度。比如3个3*3的堆积核和1个7*7卷积核,在相同感知野情况下,堆积核参数更少,深度更深。
也是卷积层后接FC。
可通过重复使用的块来构建网络,可自由指定块每块中卷积层个数和小卷积和的堆积数(输出通道数)
该网络就是在AlexNex的基础上通过增加网络深度大幅度提高了网络性能
缺点:
速度也慢
Ninnet
优点:
通过串联卷积层和1*1卷积层(效果类似FC)的小网络块来加深网络。每个块后接一个池化层。卷积层的参数尺寸(11*11 5*5 3*3)、通道数和Alexnet一样。
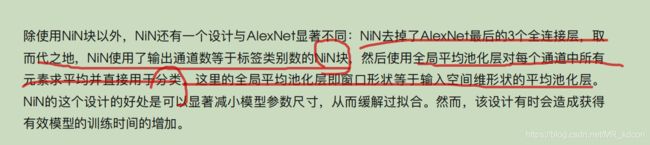
但采用输出通道数等于标签类别数的nin块取代Alexnet的3个FC,然后用全局平均池化来直接输出给softmax。显著减小模型参数,比如块最后的输出(batch,10, 6, 6)转(batch,10*6*6)接FC,则需要10*6*6*10个W、10个b。而NIN的做法做全局平均池化(10,6,6)->(10,1,1)转(batch,10),不需要参数。
Googlenet
优点:
吸收了nin对于网络块串联网络块的思想,在一个inception网络块中使用4路并行,包括1*1卷积层(减少通道数降低模型复杂度)、卷积池化层(提取信息),最后在通道维推挤合并来扩大网络宽度(通道)。
利用inception网络块串联inception网络块形成1个子网络来加深网络深度,然后子网络相互串联继续加深网络
Resnet:
优点:实现了网络的加深与拒绝性能下降共存。解决了网络深度变深以后的性能退化问题