6 海康视觉平台VisionMaster 上手系列:常用工具(三)
VisionMaster 常用的工具:(以下用VM简称 VisionMaster)
1,模板匹配工具,以及其扩展,位置修正工具。
2,测量矩形工具,以及其扩展应用:找边缘点,找直线,找圆,等等
3,标定工具和畸变矫正工具。以及其扩展标定板类型2工具。
4,几何计算工具。点点,点线,线线测量工具。旋转计算工具。流程逻辑工具。
3,标定工具和畸变矫正工具。以及其扩展标定板类型2工具。
简单说一下畸变是什么?
可以简化理解为镜头成像误差,导致明明是正方形,拍出来,变成梯形,弧形等等。畸变矫正,就是把这个变形给他纠正过来。让它拍出来,还是个正方形。
平常我们看,还像没怎么变形,正方形拍出来就是正方形。其实它是有变形的。只是变形量很小,你但用眼睛看,看不出来。
在高精度的定位,测量。是需要把这个微小的变形,纠正过来的。
那怎么纠正呢?就是我们的畸变矫正工具。
过程是:
1,准备一块,高精度的标定板,通常是棋盘格(国际象棋棋盘,黑白格子);
2,把这标定板,放到工作位置。让相机拍一张照片。
3,使用畸变标定工具。(设置2个参数:畸变类型,中心位置)
4,运行后,就会输出一个,畸变标定文件。下次拍照后,使用畸变校正工具,载入畸变标定文件。就可以输出一张畸变矫正后的图片。


 如上图所示,就把一张,变形的图片,纠正过来了。
如上图所示,就把一张,变形的图片,纠正过来了。
上图故意选取一张很极端的图片。正常拍摄的图片,不会变形这个样子。
再讲一个,特别的扩展功能。 海康Ⅱ类型标定板。(就是带二维码坐标的棋盘格)(这个内容,开始不要求掌握,你只要知道有什么回事,以后要用的时候,能想起来,再过来多看几遍,理解一下)(海康Ⅱ类型标定板与visionPro的很像,有借鉴)
首先要制作一个海康Ⅱ类型标定板。先生成标定板的文件。然后找光学标定板制作商,制作一块这个标定板。精度要求高,要用玻璃,或陶瓷的。精度要求不高,可以用菲林的。
(海康Ⅱ类型标定板一般 需要较大的尺寸)

有了标定板。有什么用呢?
1,拼图用。比如:要拍一个平板电脑的显示屏。给他做定位。相机视野又很小。要求你拍平板左上角,右上角的mark点。求出两mark点的中点,以及两mark点连线的角度。
如果你用常规方法,做就很麻烦。但是如果你把拍两次,拼接成一张图。是不是就变的简单了。就变成了,在一张图上,找2个点,求中点和角度。

如上图所示,我把四张图片,拼接成一张图片。
2,不拼接,直接把 相机的图像坐标,转换到 标定板坐标。后面的计算,都用标定板坐标,不在用图像坐标。
应用:
1,多相机测量大尺度的时候,非常方便。不需要拼图,节约时间。
2,单相机,移动轴,测量大尺度的时候。
3,异轴移动相机定位的时候。
优点:不用拼图,节约时间。
缺点:不够直观,需要理解后才能灵活应用。
单相机+移动轴 转到大标定板。其原理就是:
让移动轴,与大标定板,建立变化关系(用N点标定)。然后让 把小视野图片+轴坐标 变换到大标定板坐标。
如果轴移动点位少,可以直接提前在所有点位下拍大标定板,并生成的标定转换关系,然后保存下来。
工作的时候,用查表的方式,用不同的轴位置下的标定转换关系,把小视野转到大标定板。
通常标定板的精度要优于轴精度。轴的重复性精度要优于轴绝对精度。
利用这两个特性。可以解决大尺寸测量定位对轴精度的依赖。且不引入轴直线度误差。
(对于大尺寸测量,这个细节很重要,轴行程越长,直线度的影响也大)
移动轴变换到大标定板的应用非常灵活。但不适合新手。课程目标是告诉你,有这个用法,等你以后要用的时候,能想起来,再过来多看几遍,理解一下。
(本课的要求,是掌握 畸变矫正,和拼图用法)
在这里,把定位用到的标定也讲一下。这个要掌握。在所有定位项目中,都需要。
我们先梳理一个概念:标定 指的是什么?
我们简化理解。就是坐标转换。 图像是一个坐标系。 标定板是个坐标系。 机械运动轴也是个坐标系。我们定位标定,就是把图像坐标系 与 机械运动轴坐标系,建立转换关系。
就是拿到 图像坐标 可以转换到 对应的 机械轴运动坐标。

如上图所示,图中有一个坐标系。而图像本身,也是个坐标系。图中红圈,图像坐标是(630,570) 同时红圈的坐标系坐标是(15,15)
标定的目的,就是你输入图像坐标(630,570)可以通过一个转换f(x,y),得到输出(15,15)
你可以输入任何坐标(x, y) 得到输出 (X, Y)。
你可能要问,那我直接看那个坐标系就好了呀。干嘛这么麻烦。
在真实项目中,是看不见这坐标系的。比如那个坐标系是 机械轴运动坐标系。你是看不见的。
我们标定,就是通过3个以上的对应点(通常用9点)。先求出转换关系f(x,y)。以后使用的时候,再用 图像坐标 作为输入,使用f(x,y) 得到 对应的 输出(机械轴运动坐标)。
如上图所示,我先已知9个蓝点的机械坐标。 机对应的图像坐标。 通过N点标定工具。得到转换关系f(x,y)。 就是标定文件。 使用的时候,通过标定转换工具。输入图像坐标,输出机械轴运动坐标。

如上图一所示,先标定9个点。

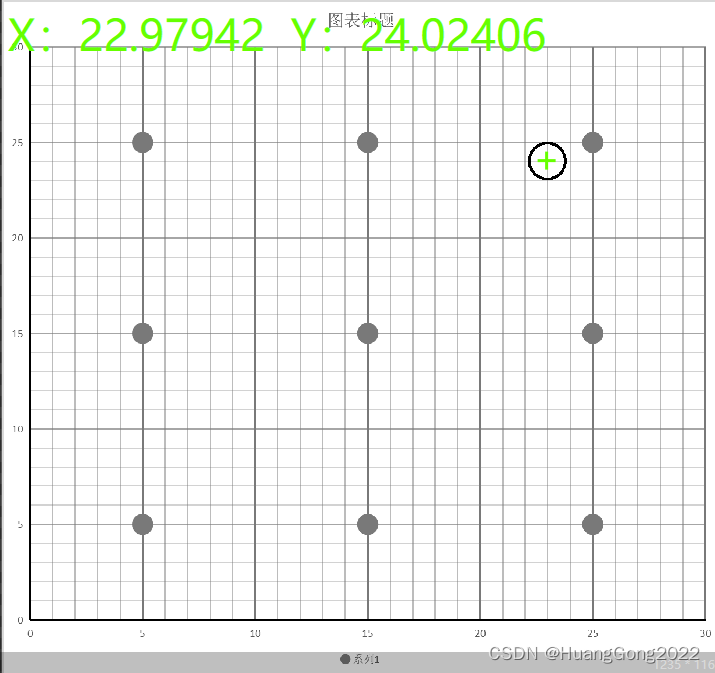

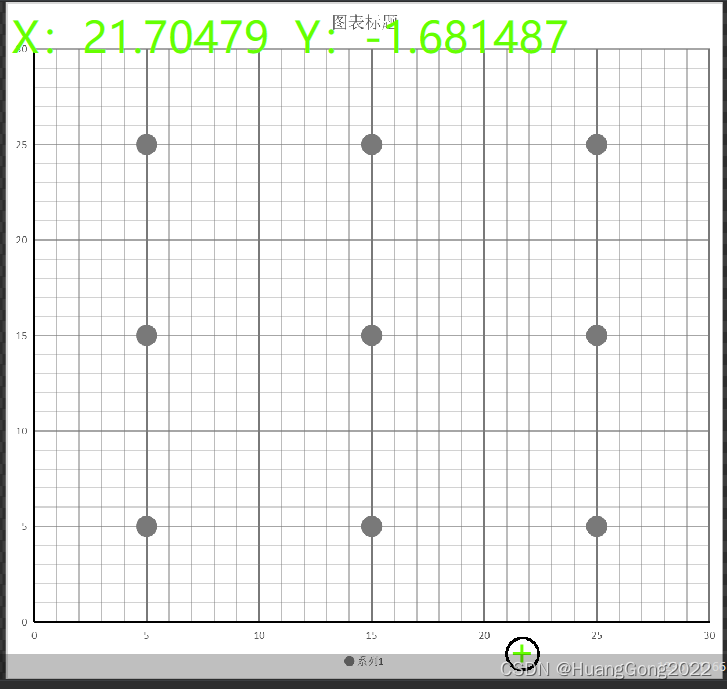
如上4图所示,图片中任意点,都可以转换到 坐标纸坐标系下。
这个要掌握。在所有定位项目中,都需要。
真实的环境下,坐标纸是看不见的。比如机械轴运动坐标系,就是看不见的。
以上就是关于标定的全部内容。