【ROS&GAZEBO】多旋翼无人机仿真(六)——SE(3)几何姿态控制器
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境 https://blog.csdn.net/qq_37680545/article/details/123185002
https://blog.csdn.net/qq_37680545/article/details/123185002
【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真https://blog.csdn.net/qq_37680545/article/details/123213054
【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型https://blog.csdn.net/qq_37680545/article/details/123243313
【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理https://blog.csdn.net/qq_37680545/article/details/123310001
【ROS&GAZEBO】多旋翼无人机仿真(五)——位置控制器https://blog.csdn.net/qq_37680545/article/details/123390601
姿态角控制问题
这一篇我们介绍rotors中的姿态控制算法。
上篇说到,lee_position_controller_node.cpp中包含了位置和姿态控制器,位置控制器我们已经讲过了如何实现,这篇我们来讲姿态控制器是怎样实现的。
在介绍姿态控制之前,我们先直观的来看姿态控制如何实现。按照直观的理解,姿态控制器就是滚转、俯仰、偏航的控制,外环计算误差姿态角,内环计算误差角速度,就可以很好的实现控制。
但是这种方式有一个极大的漏洞——只适用于小角度。为什么这么说呢?因为欧拉角是和旋转顺序有关的,并且存在万向节死锁,这两个bug使得欧拉角控制只能适应小角度下的近似姿态控制。怎么来理解小角度假设呢?
我们来看下面两种旋转顺序:
1)欧拉角定义为3-1-2旋转,(即航向角-俯仰角-滚转角)
假设旋转角度为小角度:
![]()
![]()
对上面的旋转矩阵小角度处理,得到如下结果:
![{\bf{C}}_n^b = \left[ {\begin{array}{*{20}{c}} 1&\psi &{ - \theta }\\ \psi &1&\phi \\ \theta &{ - \phi }&1 \end{array}} \right]](http://img.e-com-net.com/image/info8/a0e50cc5ba5f40b3847ec9e512964b13.gif)
2)欧拉角定义为3-2-1旋转,(即航向角-滚转角-俯仰角)
对上面的旋转矩阵小角度处理,得到如下结果:
可以看出,3-1-2和3-2-1两种旋转方式;基于小角度的旋转矩阵是相同的;同时,可以验证出,只要经过三次基本旋转(X、Y、Z轴各转动仅且一次),最终得到的方向余弦矩阵是一样的。但是这些所有结果都是在小角度条件下的。
若不在小角度条件下,不同旋转顺序导致的旋转矩阵结果不相同,这就导致姿态控制存在了问题,姿态控制必须要按旋转顺序进行控制才能回到初始姿态。例如按3-1-2顺序控制,需要先旋转俯仰角、再旋转滚转角、最后再旋转航向角才能回到正确的姿态。而对于飞行器来说,姿态控制频率都非常高,常见的ardupilot、px4等都在1KHz,若按顺序依次进行控制,可能飞机早已经炸机了。
那还有没有能够同时实现三维姿态控制的方法呢?一种就是上面说的小角度假设控制,飞机不进行较大角度的机动,弊端也很明显了,如果想玩花式特技怎么办呢,那结果必然是一次性的表演。。。,第二种方式就是采用四元数控制,这种方法我们留在后面再讲,第三种是几何控制,也就是今天我要介绍的一种控制方法——用姿态矩阵进行控制,目前作者已知就这三种控制方法,不知道会不会有其他更好的方法。
几何控制
几何控制器将多旋翼无人机的动力学全局表示在特殊欧几里德群SE(3)的构型流形上。 该方法已应用于李群上的完全驱动刚体动力学,有全局的渐近稳定性。几何控制器的整体结构如下:

平动动力学计算出总的推力 和用于稳定平动动力学的轴向量
和用于稳定平动动力学的轴向量![]() ,但是这样还差一个自由度航向还未计算出来,因此需要确定航向的轴向量
,但是这样还差一个自由度航向还未计算出来,因此需要确定航向的轴向量![]() ,再根据航向
,再根据航向![]() 、
、![]() 、
、![]() 确定组成一个正交轴系。
确定组成一个正交轴系。
![]() 怎么确定呢,采用叉乘公式,得到和
怎么确定呢,采用叉乘公式,得到和![]() 、
、![]() 正交的
正交的![]() :
:
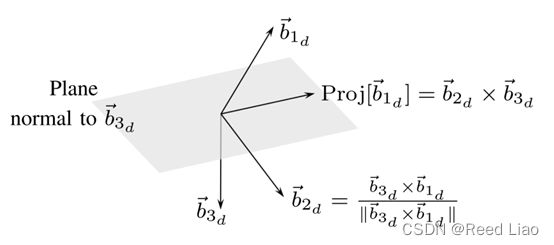
这时我们已经获得了![]() 和
和![]() 轴了,但是此时
轴了,但是此时![]() 轴和
轴和![]() 还不是正交的,同样的道理,我们再将
还不是正交的,同样的道理,我们再将![]() 轴投影到正交轴上:
轴投影到正交轴上:
![]()
再重新组合的正交轴系就是我们的期望姿态矩阵![]() ,
,
![]()
如下图所示:
计算误差姿态:
根据旋转矩阵计算误差角度公式如下:
![]()
![]() 代表的意思是从反对称矩阵转换成向量。误差角速度计算如下:
代表的意思是从反对称矩阵转换成向量。误差角速度计算如下:
![]()
有了误差姿态和角速度,就可以很容易的计算期望力矩了。
![]()
期望力矩由误差姿态、误差角速度、和当前的力矩组成。形式上和期望加速度差不多。
代码:
有了上面的理论分析,现在再回到rotors的代码就很好理解了。对代码的说明已经放在注释里面了。
// Implementation from the T. Lee et al. paper
// Control of complex maneuvers for a quadrotor UAV using geometric methods on SE(3)
void LeePositionController::ComputeDesiredAngularAcc(const Eigen::Vector3d& acceleration,
Eigen::Vector3d* angular_acceleration) const {
assert(angular_acceleration);
Eigen::Matrix3d R = odometry_.orientation.toRotationMatrix();
//========================================================================
//计算期望姿态矩阵
// Get the desired rotation matrix.
Eigen::Vector3d b1_des;
double yaw = command_trajectory_.getYaw();
b1_des << cos(yaw), sin(yaw), 0;
Eigen::Vector3d b3_des;
b3_des = -acceleration / acceleration.norm();
Eigen::Vector3d b2_des;
b2_des = b3_des.cross(b1_des);
b2_des.normalize();
Eigen::Matrix3d R_des;
R_des.col(0) = b2_des.cross(b3_des);
R_des.col(1) = b2_des;
R_des.col(2) = b3_des;
//========================================================================
//计算误差角度
// Angle error according to lee et al.
Eigen::Matrix3d angle_error_matrix = 0.5 * (R_des.transpose() * R - R.transpose() * R_des);
Eigen::Vector3d angle_error;
vectorFromSkewMatrix(angle_error_matrix, &angle_error);
//========================================================================
//计算误差角速度
// TODO(burrimi) include angular rate references at some point.
Eigen::Vector3d angular_rate_des(Eigen::Vector3d::Zero());
angular_rate_des[2] = command_trajectory_.getYawRate();
Eigen::Vector3d angular_rate_error = odometry_.angular_velocity - R_des.transpose() * R * angular_rate_des;
//========================================================================
//计算期望角加速度
*angular_acceleration = -1 * angle_error.cwiseProduct(normalized_attitude_gain_)
- angular_rate_error.cwiseProduct(normalized_angular_rate_gain_)
+ odometry_.angular_velocity.cross(odometry_.angular_velocity); // we don't need the inertia matrix here
}
对rotors的几何控制就分析到这里。
感兴趣的朋友可以点个赞,关注微信公众号交流:Reed UAV
