智能网联汽车学习——思维导图
智能网联汽车定义

智能网联汽车的判断依据主要为:是否存在V2X的通信功能

智能网联汽车的发展最终目标是无人驾驶汽车
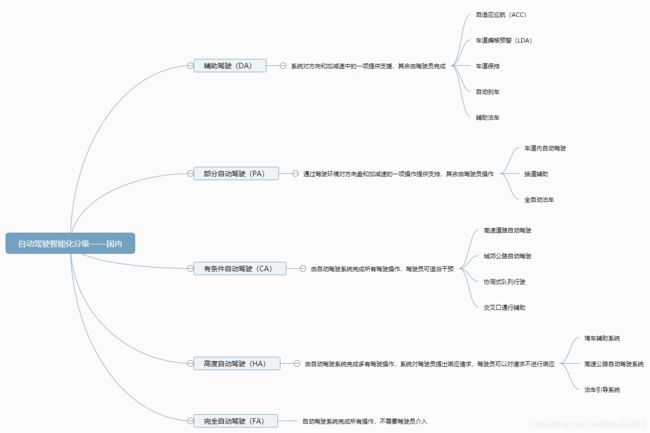
智能网联汽车分级


智能网联汽车结构



ADAS系统分类

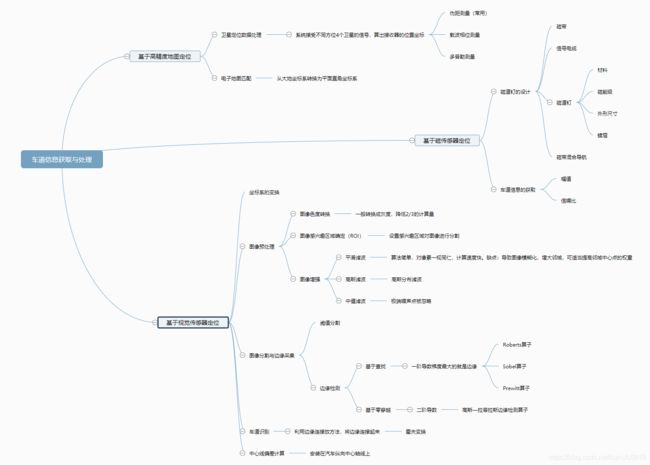
智能网联汽车环境感知


传感器特点



超声波传感器
以低于20Hz的声波称为次声波,20Hz~20kHz的称为可听波,大于20kHz的为超声波。

超声波传感器测距原理:发射超声波脉冲、经媒质传到障碍物反射传到接收器,当发射器与接收器很近时,L=vt/2(v:波在介质中的传播速度,t:接收时间)

超声波传感器一般用于自动泊车辅助系统。
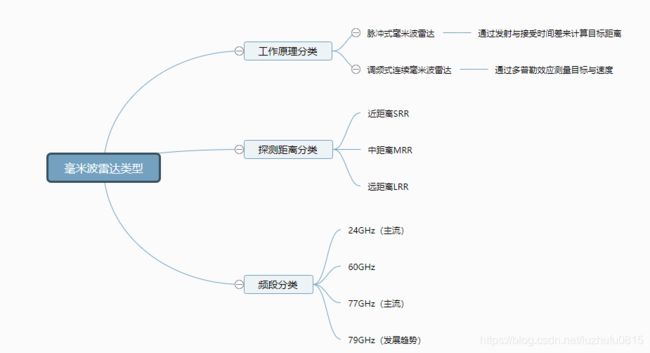
毫米波雷达
毫米波雷达指波长在1~10mm的电磁波,对应频率范围为30~300GHz,毫米波雷达是ADAS的核心传感器,主要用于自适应巡航控制系统、自动紧急制动系统、盲区检测系统、行人检测系统等。
毫米波位于微波与远红外波相交叠的波长范围,所以兼有两种波谱的优点。
波的传播理论,波长越短,频率越高,穿墙能力越强,传播损耗越大,传输距离短。

调频式连续雷达测量原理

毫米波雷达测距和测速计算公式:

s为相对距离;c为光速;∆t为发射信号与回波信号的时间间隔;T为信号发射周期;f'为发射信号与反射信号的频率差;∆f为调频带宽;![]() 为多普勒频率;
为多普勒频率;![]() 为发射信号的中心频率;u为相对速度。
为发射信号的中心频率;u为相对速度。
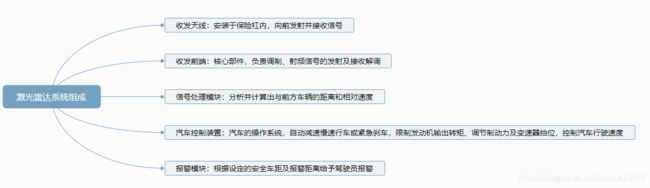
激光雷达
激光雷达是工作在光频波段的雷达,利用光频波段的电磁波先向目标发射探测信号,再将其与发射信号作比较,从确定目标(距离、方位和高度)、运动状态(速度、姿态),实现探测、跟踪和识别。
激光雷达分为两类:一类在车辆四周,线数一般小于8线(常见单线和4线),另外的安装在车顶,一般不小于16线,常见16/32/64线。
车载激光雷达采用多个激光发射器和接收器,建立三维点云图,达到实时环境感知的目的。

激光雷达测距原理:通过测算激光发射信号与回波信号的往返时间计算距离。激光测距方式主要分为两种:脉冲法激光测距和相位法激光测距。
s距离;c光速;T时间




视觉传感器(摄像头)
视觉传感器主要由光源、镜头、图像传感器、模数转换器、图像处理器、图像存储器等组成







V2X技术




智能网联汽车前向碰撞预警技术(FCW)
FCW是通过声音、视觉或触觉等感官获取信息方式辅助驾驶员在前方存在潜在碰撞危险的系统。

障碍物距离信息获取与处理是前向碰撞预警技术的重要环节,前向碰撞预警技术主要分为两块:前方障碍物距离检测(毫米波雷达)和前方障碍物识别(视觉传感器)。

智能网联汽车前向碰撞预警算法

w为警告变量;D为距离;![]() 为紧急制动距离,
为紧急制动距离,![]() 为报警距离,
为报警距离,![]() 为刹停距离
为刹停距离
通常设立一个m阈值(0~1),w~1则安全状态;w处于m到1的时候处于危险中,危险程度不大;当w处于0~m时处于危险程度很大的状态,预警采用频率高声音较大的警报;w小于0时启动自动紧急制动。


马自达模型:
![]() 为报警距离;
为报警距离;![]() 为本车车速;
为本车车速;![]() 为相对车速;
为相对车速;![]() 为本车减速度一般取6m/
为本车减速度一般取6m/![]() ;
;![]() 为前车减速度一般取8m/
为前车减速度一般取8m/![]() ,
,![]() 为驾驶员反应时间,一般取0.15s;
为驾驶员反应时间,一般取0.15s;![]() 为系统延迟时间一般取0.6s;
为系统延迟时间一般取0.6s;![]() 为刹停距离,一般取5m
为刹停距离,一般取5m
本田模型:
![]() 为紧急制动距离;
为紧急制动距离;![]() 为前车速度;
为前车速度;![]() 为本车减速度;一般取7.8m/
为本车减速度;一般取7.8m/![]() ;
;![]() 为前车减速度一般取7.8m/
为前车减速度一般取7.8m/![]() ,
,![]() 为系统延迟时间,一般取0.5s;
为系统延迟时间,一般取0.5s;![]() 为制动时间一般取1.5s
为制动时间一般取1.5s
伯克利模型:![]()
预警使用的马自达模型,a1与a2设定为6m/![]() ,制动采用类本田模型
,制动采用类本田模型
全工况模型:

X1为本车行驶距离;X2为前车行驶距离;D为刹车前车距;D0为刹停距离
防撞预警距离为![]()
报警距离为![]()
![]() 为驾驶员反应时间,
为驾驶员反应时间,![]() 为制动协调时间,
为制动协调时间,![]() 为制动减速度增长时间
为制动减速度增长时间

智能网联汽车车道偏离预警技术(LDW)
LDW系统在汽车行驶过程中全程开启,常用在高速公路、城市快速路等路段,报警信号有仪表盘报警、语音提示、座椅或者转向盘振动等

车道偏离预警算法

基于单目视觉传感器的车道线识别

智能网联汽车盲区检测技术(BSD\LCA)

盲区检测系统原理:当车速大于阈值时启动,如果有车辆或行人即传送给控制单元,控制单元进行决策后在后视镜LED显示,对于智能网联汽车可以采用V2V和V2I通信。


智能网联汽车车道保持辅助技术(LKA)
LKA系统能够主动检测汽车行驶时横向偏移,对转向和制动进行协调控制的系统。根据车道偏离预警技术的基础上发展来的,系统中信号以数字信号的形式通过汽车总线技术实现。
