动态系统建模与仿真 基本知识笔记(源自DR_CAN)
动态系统建模与仿真
一、电路系统
电阻、电容、电感
e R = i ∗ R e_R=i*R eR=i∗R
e c = 1 c ∗ q = 1 c ∗ ∫ 0 t i d t e_c=\frac{1}{c}*q=\frac{1}{c}*\int_{0}^{t}{i}dt ec=c1∗q=c1∗∫0tidt
e L = L ∗ d i d t = L ∗ i ′ e_L=L*\frac{di}{dt}=L*i' eL=L∗dtdi=L∗i′
基尔霍夫定律:
KCL:所有进入某节点的电流的总和等于所有离开这节点的电流总和
KVL:沿着闭合回路的所有元件两端的电压的代数和等于0
二、拉普拉斯变换
f ( t ) − − F ( s ) f(t)--F(s) f(t)−−F(s)
从时域到s域
F ( S ) = L [ f ( t ) ] = ∫ 0 ∞ f ( t ) ∗ e − s t d t F(S)=L[f(t)]=\int_{0}^{\infty}{f(t)*e^{-st}}dt F(S)=L[f(t)]=∫0∞f(t)∗e−stdt
s = σ + j ω s=\sigma+j\omega s=σ+jω
(1)在t<0时,f(t)=0;
(2)在t≥0的任一有限区间内,f(t)是分段连续的;
三、八种常见拉氏变换
欧拉公式补充
e i x = c o s ( x ) + i ∗ s i n ( x ) e^{ix}=cos(x)+i*sin(x) eix=cos(x)+i∗sin(x)
1、单位脉冲函数
δ ( t ) = { ∞ , t = 0 0 , t ≠ 0 \delta(t)=\begin{cases} \infty,t=0\\ 0, t\neq0\end{cases} δ(t)={∞,t=00,t=0
L [ δ ( t ) ] = 1 L[\delta(t)]=1 L[δ(t)]=1
2、单位阶跃函数
u ( t ) = { 0 , t < 0 1 , t ≥ 0 u(t)=\begin{cases} 0,t<0\\ 1, t\geq0\end{cases} u(t)={0,t<01,t≥0
L [ u ( t ) ] = 1 s L[u(t)]=\frac{1}{s} L[u(t)]=s1
3、单位斜坡函数
r ( t ) = { 0 , t < 0 t , t ≥ 0 r(t)=\begin{cases} 0,t<0\\ t, t\geq0\end{cases} r(t)={0,t<0t,t≥0
L [ r ( t ) ] = 1 s 2 L[r(t)]=\frac{1}{s^2} L[r(t)]=s21
4、单位加速度函数
r ( t ) = { 0 , t < 0 1 2 t 2 , t ≥ 0 r(t)=\begin{cases} 0,t<0\\ \frac{1}{2}{t^2}, t\geq0\end{cases} r(t)={0,t<021t2,t≥0
L [ r ( t ) ] = 1 s 3 L[r(t)]=\frac{1}{s^3} L[r(t)]=s31
5、指数函数
r ( t ) = e a t r(t)=e^{at} r(t)=eat
r ( t ) = e − a t r(t)=e^{-at} r(t)=e−at
L [ e a t ] = 1 s − a L[e^{at}]=\frac{1}{s-a} L[eat]=s−a1
L [ e − a t ] = 1 s + a L[e^{-at}]=\frac{1}{s+a} L[e−at]=s+a1
6、正弦函数
r ( t ) = s i n ( ω t ) r(t)=sin(\omega t) r(t)=sin(ωt)
L [ s i n ( ω t ) ] = ω s 2 + ω 2 L[sin(\omega t)]=\frac{\omega}{s^2+\omega^2} L[sin(ωt)]=s2+ω2ω
7、余弦函数
r ( t ) = c o s ( ω t ) r(t)=cos(\omega t) r(t)=cos(ωt)
L [ c o s ( ω t ) ] = s s 2 + ω 2 L[cos(\omega t)]=\frac{s}{s^2+\omega^2} L[cos(ωt)]=s2+ω2s
8、幂函数
r ( t ) = t n r(t)=t^n r(t)=tn
L [ t n ] = n ! s n + 1 L[t^n]=\frac{n!}{s^{n+1}} L[tn]=sn+1n!
四、传递函数
输入U(t),输出X(t)
a x ′ ′ ( t ) + b x ′ ( t ) + c x = u ( t ) ax''(t)+bx'(t)+cx=u(t) ax′′(t)+bx′(t)+cx=u(t)
s 2 a X ( s ) + s b X ( s ) + C X ( s ) = U ( s ) s^2aX(s)+sbX(s)+CX(s)=U(s) s2aX(s)+sbX(s)+CX(s)=U(s)
G = X ( s ) U ( s ) G=\frac{X(s)}{U(s)} G=U(s)X(s)
五、一阶系统
一般形式
G = X ( s ) U ( s ) = a s + a G=\frac{X(s)}{U(s)}=\frac{a}{s+a} G=U(s)X(s)=s+aa
1、单位阶跃响应
令输入为单位阶跃函数,则
U ( S ) = 1 s , X ( S ) = 1 s − 1 s + a U(S)=\frac1s,X(S)=\frac1s-\frac1{s+a} U(S)=s1,X(S)=s1−s+a1
拉普拉斯反变换
x ( t ) = 1 − e a t x(t)=1-e^{at} x(t)=1−eat
时间常数
τ = 1 a \tau=\frac1a τ=a1
x ( τ ) = 0.63 x(\tau)=0.63 x(τ)=0.63
稳定时间 Settling time
T s s = 4 τ T_{ss}=4\tau Tss=4τ
x ( 4 τ ) = 0.98 x(4\tau)=0.98 x(4τ)=0.98
2、频率响应 G(jω)
输 入 : M i ∗ s i n ( ω t + ϕ i ) 输入:M_i*sin(\omega t+\phi_i) 输入:Mi∗sin(ωt+ϕi)
输 出 : M o ∗ s i n ( ω t + ϕ o ) 输出:M_o*sin(\omega t+\phi_o) 输出:Mo∗sin(ωt+ϕo)
振 幅 响 应 : M G = ∣ G ( j ω ) ∣ 振幅响应:M_G=|G(j\omega)| 振幅响应:MG=∣G(jω)∣
相 位 响 应 : ϕ G = ∠ G ( j ω ) 相位响应:\phi_G=\angle G(j\omega) 相位响应:ϕG=∠G(jω)

低 通 滤 波 器 : G = X ( s ) U ( s ) = a s + a 低通滤波器:G=\frac{X(s)}{U(s)}=\frac{a}{s+a} 低通滤波器:G=U(s)X(s)=s+aa

高 通 滤 波 器 : G = X ( s ) U ( s ) = s s + a 高通滤波器:G=\frac{X(s)}{U(s)}=\frac{s}{s+a} 高通滤波器:G=U(s)X(s)=s+as

六、二阶系统
1、弹簧阻尼系统
m x ′ ′ = F − k x − B x ′ mx''=F-kx-Bx' mx′′=F−kx−Bx′
x ′ ′ + B m x ′ + k m x = F x''+\frac{B}{m}x'+\frac{k}{m}x=F x′′+mBx′+mkx=F
特殊概念
固 有 频 率 : ω n = k m 固有频率:\omega_n=\sqrt{\frac{k}{m}} 固有频率:ωn=mk
阻 尼 比 : ζ = B 2 k m 阻尼比:\zeta=\frac{B}{2\sqrt{km}} 阻尼比:ζ=2kmB
整理微分方程
x ′ ′ + 2 ζ ω n x ′ + ω n 2 x = F x''+2\zeta\omega_n x'+\omega_n^2x=F x′′+2ζωnx′+ωn2x=F
2、单位阶跃响应
定义u(t)=F/wn2(单位化)
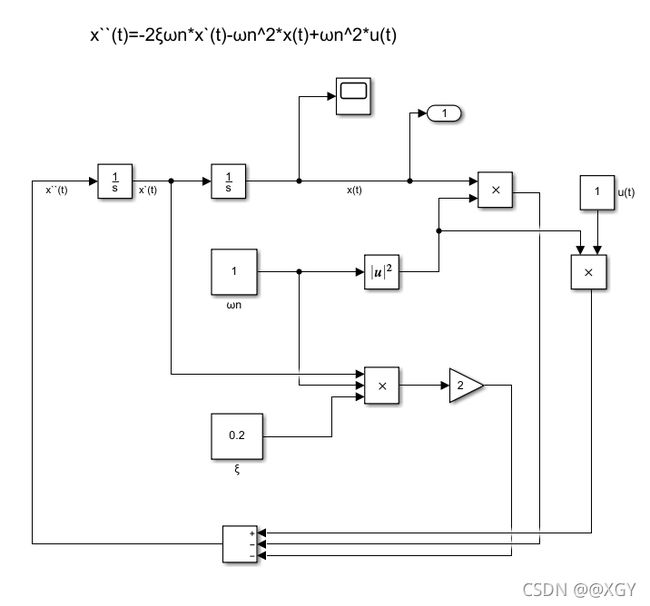
x ′ ′ + 2 ζ ω n x ′ + ω n 2 x = ω n 2 u ( t ) x''+2\zeta\omega_n x'+\omega_n^2x=\omega_n^2u(t) x′′+2ζωnx′+ωn2x=ωn2u(t)
(1)ζ>1,过阻尼
(2)ζ=1,临界阻尼
(3)0<ζ<1,欠阻尼

3、系统性能分析

百 分 之 2 稳 定 : T s s = 4 ζ ω n 百分之2稳定:T_{ss}=\frac{4}{\zeta \omega_n} 百分之2稳定:Tss=ζωn4
百 分 之 5 稳 定 : T s s = 3 ζ ω n 百分之5稳定:T_{ss}=\frac{3}{\zeta \omega_n} 百分之5稳定:Tss=ζωn3
4、频率响应 G(jω)
振 幅 响 应 : M G = ∣ G ( j ω ) ∣ 振幅响应:M_G=|G(j\omega)| 振幅响应:MG=∣G(jω)∣
相 位 响 应 : ϕ G = ∠ G ( j ω ) 相位响应:\phi_G=\angle G(j\omega) 相位响应:ϕG=∠G(jω)
传递函数
G ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 G(s)=\frac{\omega_n^2}{s^2+2\zeta\omega_ns+\omega_n^2} G(s)=s2+2ζωns+ωn2ωn2
共振频率
ω = ω n 1 − 2 ζ 2 \omega=\omega_n\sqrt{1-2\zeta^2} ω=ωn1−2ζ2
七、Bode图
振幅相应图:20logM(dB)
相位响应图
振 幅 响 应 : M G = ∣ G ( j ω ) ∣ 振幅响应:M_G=|G(j\omega)| 振幅响应:MG=∣G(jω)∣
相 位 响 应 : ϕ G = ∠ G ( j ω ) 相位响应:\phi_G=\angle G(j\omega) 相位响应:ϕG=∠G(jω)
Matlab函数:bode
d B = 10 lg ( M 0 M i ) 2 = 20 lg M dB=10\lg(\frac{M_0}{M_i})^2=20\lg M dB=10lg(MiM0)2=20lgM
利用logAB=logA+logB组合绘制不同图形
G ( j ω ) = G 1 ( j ω ) ∗ G 2 ( j ω ) G(j\omega)=G_1(j\omega)*G_2(j\omega) G(jω)=G1(jω)∗G2(jω)
20 l o g ∣ G ( j ω ) ∣ = 20 l o g ∣ G 1 ( j ω ) ∣ + 20 l o g ∣ G 2 ( j ω ) ∣ 20log|G(j\omega)|=20log|G_1(j\omega)|+20log|G_2(j\omega)| 20log∣G(jω)∣=20log∣G1(jω)∣+20log∣G2(jω)∣