YOLOV5源码的详细解读
YOLOv5 目录结构
├── data:主要是存放一些超参数的配置文件(这些文件(yaml文件)是用来配置训练集和测试集还有验证集的路径的,其中还包括目标检测的种类数和种类的名称);还有一些官方提供测试的图片。如果是训练自己的数据集的话,那么就需要修改其中的yaml文件。但是自己的数据集不建议放在这个路径下面,而是建议把数据集放到yolov5项目的同级目录下面。
|——dataset :存放自己的数据集,分为images和labels两部分
├── models:里面主要是一些网络构建的配置文件和函数,其中包含了该项目的四个不同的版本,分别为是s、m、l、x。从名字就可以看出,这几个版本的大小。他们的检测测度分别都是从快到慢,但是精确度分别是从低到高。这就是所谓的鱼和熊掌不可兼得。如果训练自己的数据集的话,就需要修改这里面相对应的yaml文件来训练自己模型。
├── utils:存放的是工具类的函数,里面有loss函数,metrics函数,plots函数等等。
├── weights:放置训练好的权重参数pt文件。
├── detect.py:利用训练好的权重参数进行目标检测,可以进行图像、视频和摄像头的检测。
├── train.py:训练自己的数据集的函数。
├── test.py:测试训练的结果的函数。
|—— hubconf.py:pytorch hub 相关代码
|—— sotabench.py: coco数据集测试脚本
|—— tutorial.ipynb: jupyter notebook 演示文件
├──requirements.txt:这是一个文本文件,里面写着使用yolov5项目的环境依赖包的一些版本,可以利用该文本导入相应版本的包。
|—-run日志文件,每次训练的数据,包含权重文件,训练数据,直方图等
|——LICENCE 版权文件
以上就是yolov5项目代码的整体介绍。我们训练和测试自己的数据集基本就是利用到如上的代码。
文件夹 data
- yaml多种数据集的配置文件,如coco,coco128,pascalvoc等
- hyps 超参数微调配置文件
- scripts文件夹存放着下载数据集额shell命令
在利用自己的数据集进行训练时,需要将配置文件中的路径进行修改,改成自己对应的数据集所在目录,最好复制+重命名。
train: E:/project/yolov5/yolov5-master/dataset/images/train # train images
val: E:/project/yolov5/yolov5-master/dataset/images/val # val images
文件夹 dataset
存放着自己的数据集,但应按照image和label分开,同时每一个文件夹下,又应该分为train,val。
.cache文件为缓存文件,将数据加载到内存中,方便下次调用快速。

文件夹 model
网络组件模块
common.py
实验测试代码
tryTest.py
模型导出脚本
tf.py # 模型导出脚本,负责将模型转化,TensorFlow, Keras and TFLite versions of YOLOv5
整体网络代码
yolo.py
网络模型配置
yolo5s.yaml
# YOLOv5 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes 类别数
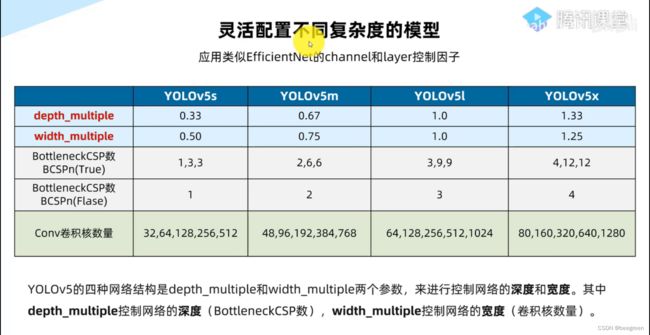
depth_multiple: 0.33 # model depth multiple 控制模型的深度
width_multiple: 0.50 # layer channel multiple 控制conv 通道的个数,卷积核数量
#depth_multiple: 表示BottleneckCSP模块的层缩放因子,将所有的BotleneckCSP模块的B0ttleneck乘上该参数得到最终个数
#width_multiple表示卷积通道的缩放因子,就是将配置里的backbone和head部分有关conv通道的设置,全部乘以该系数
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
#from 列参数 :当前模块输入来自那一层输出,-1 表示是从上一层获得的输入
#number 列参数:本模块重复次数,1 表示只有一个,3 表示有三个相同的模块
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4 128表示128个卷积核,3 表示3*3卷积核,2表示步长为2
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
#作者没有分neck模块,所以head部分包含了panet+detect部分
head:
[[-1, 1, Conv, [512, 1, 1]], #上采样
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
文件夹 runs
文件夹 train 存放着训练数据时记录的数据过程
文件夹 detect 存放着使用训练好的模型,每次预测判断的数据

文件夹 utils
目标检测性能指标
检测精度
precision,recall,f1 score
iou(intersection over union)交并比
P-R curve (precision-recall curve)
AP (average precison)
mAP (mean ap)
检测速度
前传耗时
每秒帧数FPS
浮点运算量 FLOPS
激活函数
activation.py
图像增强
augmentations.py
# YOLOv5 by Ultralytics, GPL-3.0 license
"""
Image augmentation functions
"""
## 读取数据集并进行处理
callback.py
datasets.py 读取数据集,并做处理的相关函数
# YOLOv5 by Ultralytics, GPL-3.0 license
"""
Dataloaders and dataset utils
"""
# Get orientation exif tag
# 是专门为数码相机相片设计的
#返回文件列表的hash值
#获取图片的宽高信息
#定义迭代器,用于detect.py
#定义迭代器,用于detect.py文件,处理摄像头
'''
cv2视频函数;
cap.grap()获取视频的下一帧,返回T/F
cap.retrieve()在grap后使用,对获取的帧进行解码,返回T/F
cap.read(frame)结合了grap和retrieve的功能,抓取下一帧并解码
'''
# Ancillary functions ----------------------------------------------------------
#加载图片并根据设定的输入大小与原图片大小比例ratio进行resize
#引入三张随机照片,生成一个图像增强图片
def load_mosaic(self, index):
# YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
labels4, segments4 = [], []
s = self.img_size
#随机取mosaic中心点
yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
#随机取三张图片的索引
indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
random.shuffle(indices)
for i, index in enumerate(indices):
# Load image
#加载图片并根据设定的输入大小与图片原大小的比例ratio进行resize
img, _, (h, w) = load_image(self, index)
# place img in img4
if i == 0: # top left
#初始化大图
#设置大图上的位置(左上角)
#选取小图上位置
#将小图上截取的部分贴到大图上
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
#计算小图到大图上时所产生的偏移,用来计算mosaic增强后的标签框位置
# Labels
labels, segments = self.labels[index].copy(), self.segments[index].copy()
if labels.size:
#重新调整标签框坐标信息
# Concat/clip labels
#调整坐标框在图片内部
# Augment
#进行mosaic的时候将四张图片整合到一起之后shape为[2*img_size,2*img_size]
#随机旋转平移缩放剪切,并resize为输入大小img_size
#随机加入8张照片,构造9张照片
#随机取三张图片的索引
# Load image
#加载图片并根据设定的输入大小与图片原大小的比例ratio进行resize
img, _, (h, w) = load_image(self, index)
# place img in img9
if i == 0: # center
#初始化大图
# Labels
# Image
# Offset
#随机取mosaic中心
# Concat/clip labels
# img9, labels9 = replicate(img9, labels9) # replicate
# Augment
# Create folder
if os.path.exists(path):
shutil.rmtree(path) # delete output folder
os.makedirs(path) # make new output folder
# Flatten a recursive directory by bringing all files to top level
# Convert detection dataset into classification dataset, with one directory per class
加载权重文件等函数
donwload.py
项目通用代码
general.py
通用代码
general.py
#Settings
#设置日志的保存级别
#获取最近训练的权重文件,last.pt
#检查当前的分支和Git上的版本是否一致,否则提醒用户
#检查图像的尺寸是否是32的整数倍。否则调整
#非极大值抑制
#torch_utils 辅助程序代码并行计算,早停策略等函数
损失函数
loss.py




计算性能指标评价
metrics.py

#计算类别的ap(p,r,f1)
#根据PR曲线计算ap
#定义混淆矩阵
huizhi t
plots.py
文件夹 weight
注意:下载的权重文件,smlx,建议提前到Git上下载好,放在此处,download.py 一般会下载失败
检测
detect.py
其余
详见:https://www.bilibili.com/video/BV19K4y197u8?p=36
代码链接
链接:https://pan.baidu.com/s/1ECUulQzNZrYxpDUjCoZZ7w
提取码:14ql
参考来源
https://www.iotword.com/3480.html