视觉SLAM学习笔记
本文是个人对《视觉SLAM十四讲》的内容进行个人理解说写下的笔记 以备忘
第三讲
-
向量
向量一般为列向量,用小写字母表示。
向量相乘
点乘为内积,可表达为以下,

叉乘为外积,可表达如下,结果为列向量,同时该列向量垂直于向量a、b,为两个向量张成的四边形有向面积。
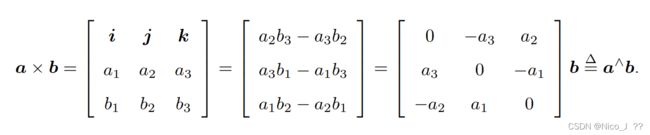
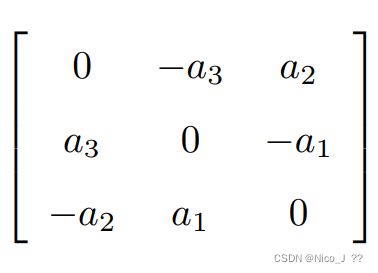
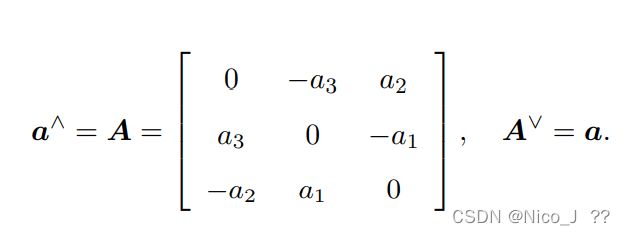
而在上述的运算中可知,向量a等价于反对称矩阵,如下,既向量转换为矩阵的一个重要的变换,用a^表示。反对称矩阵A有以下变换AT=-A。
-
坐标
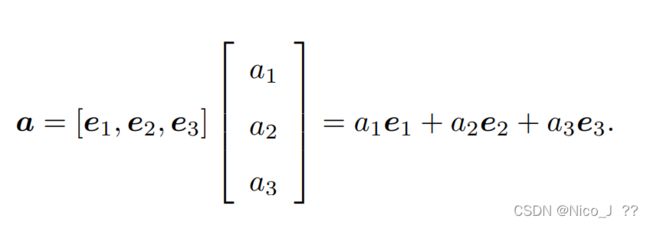
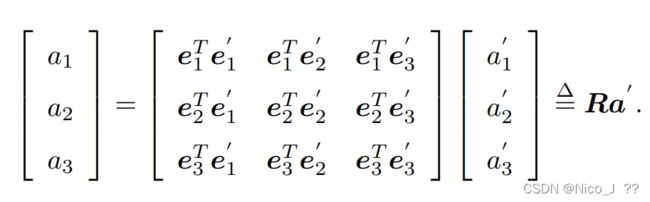
向量a(a1,a2,a3)T在基(e1,e2,e3)下,坐标为a1e1+2e2+a3e3,表达式如下。
经过旋转,向量于基均发生改变,表达式如下
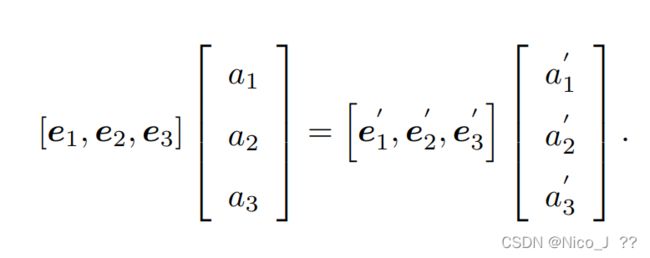
化简,得到旋转矩阵R,如下。
-
旋转矩阵
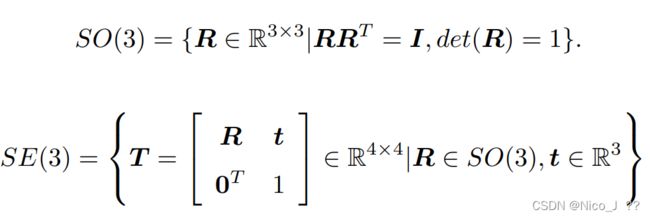
对于旋转矩阵R,定义李群SO(3),如下。det()为计算行列式

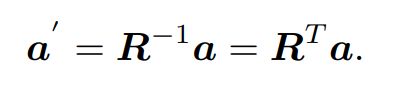
对于反向旋转可
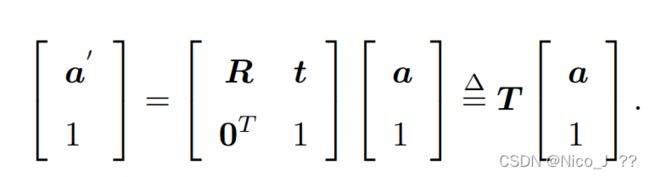
考虑到平移,需加上平移向量t,其中T为变换矩阵四维。
于是有定义李群SE(3),如下。
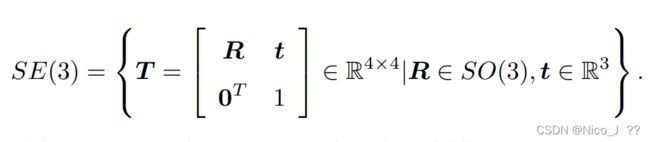
变换矩阵T的逆表示维。

对于安装完成Eigen后编译索引失败,需运行以下命令复制文件夹。sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include -
旋转向量
旋转矩阵必须是一个正交矩阵且行列式需为1,变换矩阵也是如此,这些约束使得求解变得困难,考虑到数据的紧凑性,为此定义旋转向量。
任意旋转可用一旋转轴与旋转角刻画,用一单位向量表示旋转轴,其长度表示旋转角,单位为rad。有罗德里格斯公式,如下。

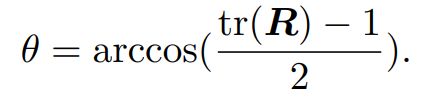
计算R的迹有

故旋转角
对于旋转轴n的旋转为:Rn=n -
欧拉角
绕Z轴旋转-偏航-yaw
绕Y轴旋转-俯仰-pitch
绕X轴旋转-滚转-roll
故可以[r, p, y]T 三维的向量描述旋转,不过注意旋转顺序之分。
关于万象锁的问题,简单来说对三轴的旋转过程中,第二次旋转为90°时,会出现第一次的旋转轴与第三次旋转轴相同。 -
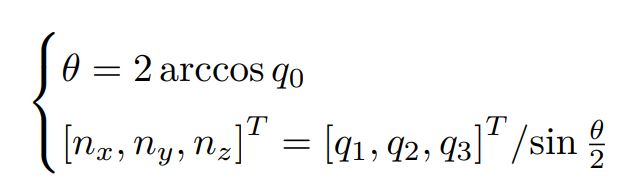
四元数
四元数由一个实部和三个虚部组成

有以下关系


第四讲
-
李群
旋转矩阵与变换矩阵分别构成特殊正交群SO(3)、特殊欧氏群SE(3),如下
对于群是一种集合加上一种运算的数据结构。满足以下条件,简称封结幺逆
封闭性: ∀a1, a2 ∈ A, a1 · a2 ∈ A.
结合律: ∀a1, a2, a3 ∈ A, (a1 · a2) · a3 = a1 · (a2 · a3).
幺元: ∃a0 ∈ A, s.t. ∀a ∈ A, a0 · a = a · a0 = a.
逆: ∀a ∈ A, ∃a−1 ∈ A, s.t. a · a−1 = a0.关于旋转矩阵满足 RRT=I
求导化简得

得知为反对称矩阵
回忆反对称矩阵,如下,^为向量转换为矩阵,而∨为矩阵转换为向量
于是对R(t)R(t)T = ϕ(t)∧化简得 同时得知对旋转矩阵求导只需左乘一个反对称矩阵即可
ϕ 反映了 R 的导数性质,故称它在 SO(3) 原点附近的正切空间

一阶泰勒展开为 f(x)=f(x0)+f’(x0)(x-x0)+o(x-x0) o为极小量
f(x)≈f(x0)+f’(x0)(x-x0)
于是

存在一个问题,根据上述及书上公式化简,普遍存在 R=exp(ϕ△)=I+ϕ△,那我们计算这个行列式会发现det®=1+a12+a22+a3≠1,那这也反映了这个约等于的误差 -
李代数



-
指数与对数映射
SO(3)指数与对数映射
ϕ 是三维向量等价于ϕ^这个反对称矩阵,而这个反对称矩阵在允许误差范围加一个I则表示为旋转矩阵,现在用ϕ既然是三维向量,尝试定义这个向量的模长和方向,分别记作 θ 和 a,于是有 ϕ = θa。这里 a 是一个长度为 1 的方向向量,满足以下两个性质。
a∧a∧ = aaT − I,
a∧a∧a∧ = −a∧

然后进行推导
发现这个推导的结果与旋转向量的罗德里格斯公式相同,那么得到一个重要的推断,反对称矩阵对应的向量就算旋转向量,既ϕ就是一个旋转向量,既李代数so(3)就是旋转向量!!!!!!
那旋转向量可由对数映射得到,既如下等式
SE(3)指数与对数映射


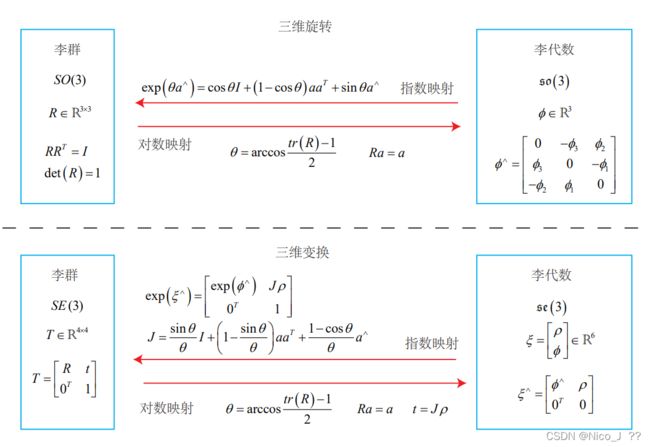
于是大总结
-
李代数求导与扰动模型
两个李代数指数映射乘积的完整形式,由 Baker-Campbell-Hausdorff 公式(BCH 公
式)得到

当 ϕ1 或ϕ2 为小量时,小量二次以上的项都可以被忽略掉。此时,BCH 拥有线性近似表达为

左乘 BCH 近似雅可比 Jl如下
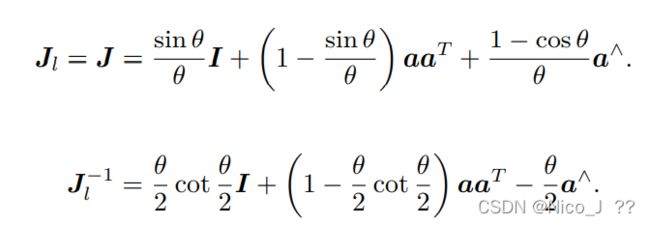
左乘 BCH 近似雅可比 Jl

假定对某个旋转 R,对应的李代数为 ϕ。我们给它左乘一个微小旋转,记作 ∆R,对应的李代数为 ∆ϕ。那么,在李群上,得到的结果就是 ∆R · R,而在李代数上,根据 BCH近似,为:J−1(ϕ)∆ϕ + ϕ。合并起来,可以简单地写成

反之,如果我们在李代数上进行加法,让一个 ϕ 加上 ∆ϕ,那么可以近似为李群上带
左右雅可比的乘法:

同样的对于SE(3),有如下

于是有有一点点点点点点点点点点点点点点点看不懂了
存在一点,坐标为p,相机位姿为T,对该点进行观测,得到贯彻数据z,噪声为w如下
z = T p + w.
那么实际数据与观测数据的误差e
e=z-Tp
如果存在一系列的点与观察那么需要寻找一个合适的T,以使整体误差最小

求解此问题,需要计算目标函数 J 关于变换矩阵 T 的导数。我们经常会构建与位姿有关的函数,然后讨论该函数关于
位姿的导数,以调整当前的估计值。然而,SO(3), SE(3) 上并没有良好定义的加法,它们
只是群。如果我们把 T 当成一个普通矩阵来处理优化,那就必须对它加以约束。而从李代
数角度来说,由于李代数由向量组成,具有良好的加法运算。因此,使用李代数解决求导
问题的思路分为两种:
1.用李代数表示姿态,然后对根据李代数加法来对李代数求导。
2.对李群左乘或右乘微小扰动,然后对该扰动求导,称为左扰动和右扰动模型。
1.李代数求导

求导结果得到较复杂的 Jl
2.扰动模型
另一种求导方式,是对 R 进行一次扰动 ∆R。这个扰动可以乘在左边也可以乘在右
边,最后结果会有一点儿微小的差异,以左扰动为例
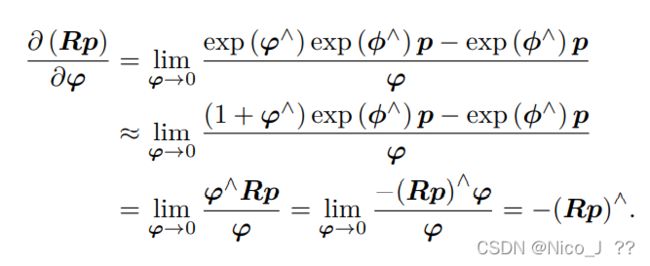
其实发现这两种方法的差别为右乘的一个Jl
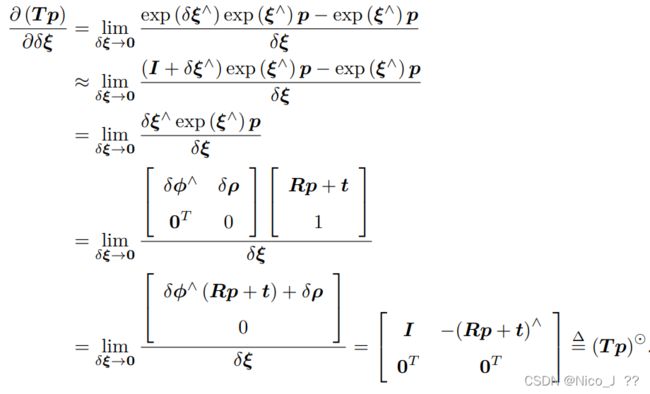
于是对SE(3)进行求导,用扰动模型
第五讲
- 相机模型
空间点P 的坐标为 [X, Y, Z]T,成像点P′ 为 [X′, Y ′, Z′]T
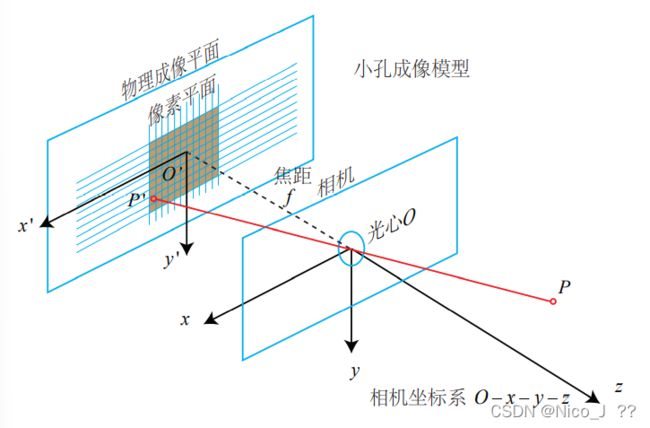
有三角关系,因成象是倒立的,所以有负号。

定义像素坐标系定义为原点 o′ 位于图像的左上角,u 轴向右与 x 轴平行,v轴向下与 y 轴平行。像素坐标系与成像平面之间,相差了一个缩放和一个原点的平移。设像素坐标在 u 轴上缩放了 α 倍,在 v 上缩放了 β 倍,同时这样优化了图像处理,使坐标系相同。因为原点平移了[cx,cy]T,P′ 的坐标与像素坐标 [u, v]T 的关系为,并把 αf 合并成 fx,把 βf 合并成 fy,如下


其中,f 的单位为米,α, β 的单位为像素每米,所以 fx, fy 的单位为像素,转化为矩阵,其中K命名为内参数矩阵。如下:

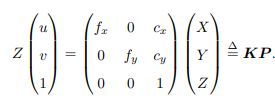
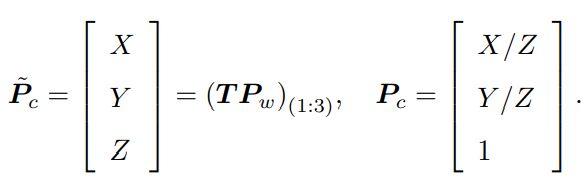
其中K命名为内参数矩阵,P为在相机坐标系下的坐标,由于P的相机坐标应该是世界坐标Pw,那相机的位姿由旋转矩阵R和平移向量t描述,那么
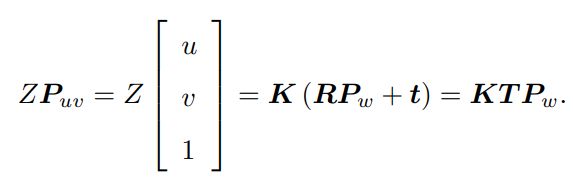
上式两侧都是齐次坐标。因为齐次坐标乘上非零常数后表达同样的含义,所以可以简
单地把 Z 去掉,如下:
但这样等号意义就变了,成为在齐次坐标下相等的概念,相差了一个非零常数。对于归一化处理,既对最后一维赋值为1, Pc 可以看成一个二维的齐次坐标,称为归一化坐标。
- 相机畸变
简单来说,径向畸变因为透镜形状发生改变而产生的畸变,导致图像中直线变曲线。切向畸变为透镜和成像面不平行也会引入切向畸变。
任意一点 p 可以用笛卡尔坐标表示为 [x, y]T, 也可以把它写成极坐标的形式[r, θ]T,其中 r 表示点 p 离坐标系原点的距离,θ 表示和水平轴的夹角。径向畸变可看成坐标点沿着长度方向发生了变化 δr, 也就是其距离原点的长度发生了变化。切向畸变可以看成坐标点沿着切线方向发生了变化,也就是水平夹角发生了变化 δθ。
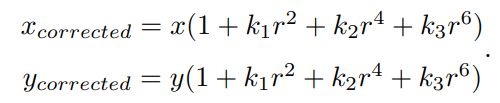
对于径向畸变,无论是桶形畸变还是枕形畸变,由于它们都是随着离中心的距离增加
而增加。我们可以用一个多项式函数来描述畸变前后的坐标变化:这类畸变可以用和距中
心距离有关的二次及高次多项式函数进行纠正,其中 [x, y]T 是未纠正的点的坐标,[xcorrected, ycorrected]T 是纠正后的点的坐标,注意它们都是归一化平面上的点,而不是像素平面上的点。如下:
对于切向畸变,可以使用另外的两个参数 p1, p2 来进行纠正:

第六讲非线性优化
- 先验、后验、似然
以下为相机的一状态方程和一观测方程,其中xk为当前相机位姿,xk-1为上一刻相机位姿,uk为运动输入,wk为噪声,设定为符合正态分布。zk,j为在位姿xk处对路标yi观察得到的像素位置,yj为路标,xk为相机位姿,vkj为噪声,符合正态分布。
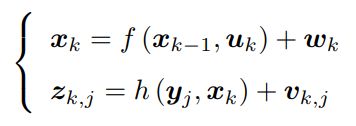
其中K 为相机内参,s 为像素点的距离,严格来说相机的观测方程可以表达为:

机器人状态的估计,是求已知输入数据 u 和观测数据 z 的条件下,计算状态 x 的条件概率分布

只有一张张的图像时,即只考虑观测方程带来的数据时,相当于估计 P(x|z) 的条件概率
分布。简单来说是根据照片对路标j的观察推断位姿x的可能性。该问题也称为 Structure from Motion(SfM),即如何从许多图像中重建三维空间结构 。在这种情况下,SLAM 可以看作是图像具有时间先后顺序的,需要实时求解一个 SfM 问题。为了估计状态变量的条件分布,利用贝叶斯法则,贝叶斯法则的分母部分与待估计的状态 x 无关,因而可以忽略,简单来说就是P(x|z)正比于P(z|x) 与P(x)的乘积,求解最大后验概率,相当于最大化似然和先验的乘积。

左侧通常称为后验概率,右侧的 P(z|x) 称为似然,P(x) 称为先验。直接求后验分布是困难的,但是求一个状态最优估计,使得在该状态下,后验概率最大化(Maximize a Posterior,MAP),则是可行的: arg max P(x|z)的意思是当P(x|z)最大时,变量的取值

现在,在只有图像数据且无位置信息时,那么就没有了先验P(x),那么求解x的最大大似然估计(Maximize Likelihood Estimation, MLE):

那么这个的意思可以理解为:观察的数据在最可能的位置姿态。 - 最小二乘
观测方程如下:

假设噪声项 vk ∼ N (0, Qk,j ),所以观测数据的条件概率为:

代入后依然符合高斯分布,为了计算使它最大化的 xk, yj,我们往往使用最小化负对数的方式,来求一个高斯分布的最大似然。
对于高维高斯分布 x ∼ N(µ, Σ),概率密度函数展开形式为,并取负对数:


对原分布求最大化相当于对负对数求最小化。在最小化上式的 x 时,第一项与 x 无关,可以略去。于是,只要最小化右侧的二次型项,就得到了对状态的最大似然估计。简单来说:求最大化的P(x),等价于求最小化的负对数,化简后,第一项与x无关,略去,于是只需最小化第二项,就可以得到对状态的最大似然估计,代入SLAM的观测模型,相当于求:

该式等价于最小化噪声项(即误差)的平方(Σ 范数意义下)。因此,对于所有的运动和任意的观测,我们定义数据与估计值之间的误差:
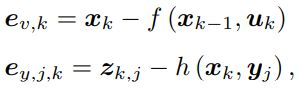
并求其误差的平方和

这就得到了一个总体意义下的最小二乘问题(Least Square Problem)。我们明白它的最优
解等价于状态的最大似然估计。直观来讲,由于噪声的存在,存在误差,为此,把状态的估计值进行微调,使得整体的误差下降一些。当然这个下降也有限度,它一般会到达一个极小值。这就是一个典型非线性优化的过程。
• 首先,整个问题的目标函数由许多个误差的(加权的)平方和组成。虽然总体的状
态变量维数很高,但每个误差项都是简单的,仅与一两个状态变量有关。例如运动
误差只与 xk−1, xk 有关,观测误差只与 xk, yj 有关。每个误差项是一个小规模的约
束,我们之后会谈论如何对它们进行线性近似,最后再把这个误差项的小雅可比矩阵
块放到整体的雅可比矩阵中。由于这种做法,我们称每个误差项对应的优化变量为
参数块(Parameter Block)。
• 整体误差由很多小型误差项之和组成的问题,其增量方程的求解会具有一定的稀疏
性(会在第十讲详细讲解),使得它们在大规模时亦可求解。
• 其次,如果使用李代数表示,则该问题是无约束的最小二乘问题。但如果用旋转矩阵
(变换矩阵)描述位姿,则会引入旋转矩阵自身的约束(旋转矩阵必须是正交阵且行
列式为 1)。额外的约束会使优化变得更困难。这体现了李代数的优势。
• 最后,我们使用了平方形式(二范数)度量误差,它是直观的,相当于欧氏空间中距
离的平方。但它也存在着一些问题,并且不是唯一的度量方式。我们亦可使用其他的
范数构建优化问题。
简单的最小二乘问题
若f是一非线性函数,甚至有m维,对于这类问题一般采用迭代的方法。
1.给定某个初始值 x0。
2.对于第 k 次迭代,寻找一个增量 ∆xk,使得 ∥f (xk + ∆xk)∥22 达到极小值。
3.若 ∆xk 足够小,则停止。
4.否则,令 xk+1 = xk + ∆xk,返回 2
这让求解导函数为零的问题,变成了一个不断寻找梯度并下降的过程。直到某个时刻
增量非常小,无法再使函数下降。此时算法收敛,目标达到了一个极小,我们完成了寻找
极小值的过程。在这个过程中,我们只要找到迭代点的梯度方向即可,而无需寻找全局导
函数为零的情况,那么问题是如何求增量∆xk 。
求解增量最直观的方式是将目标函数在 x 附近进行泰勒展开:

这里 J 是 ∥f(x)∥2 关于 x 的导数(雅可比矩阵),而 H 则是二阶导数(海塞(Hessian)
矩阵)。我们可以选择保留泰勒展开的一阶或二阶项,对应的求解方法则为一阶梯度或二
阶梯度法。如果保留一阶梯度,那么增量的方向为:

它的直观意义非常简单,只要我们沿着反向梯度方向前进即可。当然,我们还需要该方向上取一个步长 λ,求得最快的下降方式。这种方法被称为最速下降法。另一方面,如果保留二阶梯度信息,那么增量方程为:

要使得最小,进行求导,∆x在等式中只含零次项、一次项、二次项,那么求导并令为0,则:
但存在H,增加计算量。
高数牛顿法它的思想是将 f(x) 进行一阶的泰勒展开(请注意不是目标函数 f(x)2):

这里 J(x) 为 f(x) 关于 x 的导数,实际上是一个 m × n 的矩阵,也是一个雅可比矩阵。根据前面的框架,当前的目标是为了寻找下降矢量 ∆x,使得 ∥f (x + ∆x)∥2 达到最小。为了求 ∆x,我们需要解一个线性的最小二乘问题:

于是先开方,再对∆x进行求导,并令其为0,如下:



我们要求解的变量是 ∆x,因此这是一个线性方程组,我们称它为增量方程,也可以称为高斯牛顿方程 (Gauss Newton equations) 或者正规方程 (Normal equations)。我们把左边的系数定义为 H,右边定义为 g,那么上式变为:
注意注意注意这里的f(x)是误差是误差是误差!!!

这里把左侧记作 H 是有意义的。对比牛顿法可见,高斯牛顿法用 JT J 作为牛顿法中二阶 Hessian 矩阵的近似,从而省略了计算 H 的过程。求解增量方程是整个优化问题的核心所在。如果我们能够顺利解出该方程,那么 高斯牛顿法的算法步骤可以写成:
1.给定初始值 x0。
2.对于第 k 次迭代,求出当前的雅可比矩阵 J(xk) 和误差 f(xk)。
3.求解增量方程:H∆xk = g.
4.若 ∆xk 足够小,则停止。否则,令 xk+1 = xk + ∆xk,返回 2
对代码的理解,如下:
slambook2/ch6/gaussNewton.cpp
#include