OpenCV 中的图像处理 006_图像渐变
本文主要内容来自于 OpenCV-Python 教程 的 OpenCV 中的图像处理 部分,这部分的全部主要内容如下:
-
改变色彩空间
学习在不同色彩空间之间改变图像。另外学习跟踪视频中的彩色对象。
-
图像的几何变换
学习对图像应用不同的几何变换,比如旋转、平移等。
-
图像阈值
学习使用全局阈值、自适应阈值、Otsu 的二值化等将图像转换为二值图像。
-
平滑图像
学习模糊图像,使用自定义内核过滤图像等。
-
形态变换
了解形态学变换,如侵蚀、膨胀、开放、闭合等。
-
图像渐变
学习寻找图像渐变、边缘等。
-
Canny 边缘检测
学习通过 Canny 边缘检测寻找边缘。
-
图像金字塔
学习关于图像金字塔的内容,以及如何使用它们进行图像混合。
-
OpenCV 中的轮廓
所有关于 OpenCV 中的轮廓的内容。
-
OpenCV 中的直方图
所有关于 OpenCV 中的直方图的内容。
-
OpenCV 中的图像变换
在 OpenCV 中遇到不同的图像变换,如傅里叶变换、余弦变换等。
-
模板匹配
学习使用模板匹配在图像中搜索对象。
-
霍夫线变换
学习在一幅图像中探测线。
-
霍夫圆变换
学习在一幅图像中探测圆。
-
使用分水岭算法的图像分割
学习使用分水岭分割算法分割图像。
-
使用 GrabCut 算法的交互式前景提取
学习使用 GrabCut 算法提取前景
目标
在本章中,我们将学习:
- 寻找图像的渐变,边缘等。
- 我们将看下如下的函数: cv.Sobel(),cv.Scharr(),cv.Laplacian() 等等。
理论
OpenCV 提供了三种类型的渐变滤波器或高通滤波器,Sobel、Scharr 和 Laplacian。我们将看下它们中的每一个。
1. Sobel 和 Scharr 导数
Sobel 算子是联合高斯平滑加微分运算,所以抗噪声能力更强。我们可以指定要采用的导数方向,垂直或水平(分别通过参数 yorder 和 xorder)。你也可以通过参数 ksize 指定内核的大小。如果 ksize = -1,则将使用一个 3x3 Scharr 滤波器,相对于 3x3 Sobel 滤波器它能给出更好的结果。请参考所使用的内核的文档。
2. Laplacian 导数
它计算由关系 Δ s r c = ∂ 2 s r c ∂ x 2 + ∂ 2 s r c ∂ y 2 \Delta src = \frac{\partial ^2{src}}{\partial x^2} + \frac{\partial ^2{src}}{\partial y^2} Δsrc=∂x2∂2src+∂y2∂2src 给出的图像的拉普拉斯算子,其中每个导数都是使用 Sobel 导数找到的。如果 ksize = 1,则将使用如下的内核用于滤波
k e r n e l = [ 0 1 0 1 − 4 1 0 1 0 ] kernel = \begin{bmatrix} 0 & 1 & 0 \\ 1 & -4 & 1 \\ 0 & 1 & 0 \end{bmatrix} kernel=⎣⎡0101−41010⎦⎤
代码
下面的代码在一幅图中展示了所有这些操作。所有的内核都是 5x5 大小的。输出图像的深度传入 -1,以获得 np.uint8 类型的结果。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
def image_gradients():
cv.samples.addSamplesDataSearchPath("/media/data/my_multimedia/opencv-4.x/samples/data")
img = cv.imread(cv.samples.findFile('sudoku.png'), 0)
print(img.shape)
img = cv.resize(img, (359, 361))
laplacian = cv.Laplacian(img, cv.CV_64F)
sobelx = cv.Sobel(img, cv.CV_64F, 1, 0, ksize=5)
sobely = cv.Sobel(img, cv.CV_64F, 0, 1, ksize=5)
cv.imshow("Original", img)
cv.imshow("Laplacian", laplacian)
cv.imshow("Sobel X", sobelx)
cv.imshow("Sobel Y", sobely)
cv.waitKey(-1)
cv.destroyAllWindows()
if __name__ == "__main__":
image_gradients()
结果如下:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qZrKoTJl-1651362541111)(https://upload-images.jianshu.io/upload_images/1315506-5e604eab748f2c88.png)]
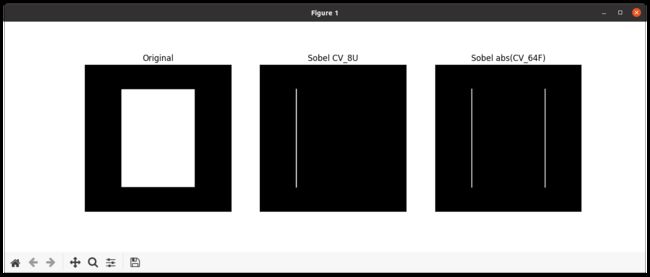
一个重要的问题
在我们的上一个例子中,输出数据类型是 cv.CV_8U 或 np.uint8。但这有一个小问题。黑色到白色的过渡被视为正斜率(它具有正值),而白色到黑色的过渡被视为负斜率(它具有负值)。因此当你将数据转为 np.uint8 时,所有的负斜率都被设置为了 0。简单来说,就是丢失了边缘。
如果我们想要探测两个边缘,更好的选项是保持输出数据类型为一些更高的形式,比如 cv.CV_16S,cv.CV_64F 等等,取它的绝对值,然后将它转回 cv.CV_8U。下面的代码演示了水平 Sobel 滤波器的此过程和结果差异。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
def image_gradients2():
img = np.zeros((600, 600))
cv.rectangle(img, (150, 100), (450, 500), (255), -1)
# Output dtype = cv.CV_8U
sobelx8u = cv.Sobel(img, cv.CV_8U, 1, 0, ksize=5)
# Output dtype = cv.CV_64F. Then take its absolute and convert to cv.CV_8U
sobelx64f = cv.Sobel(img, cv.CV_64F, 1, 0, ksize=5)
abs_sobel64f = np.absolute(sobelx64f)
sobel_8u = np.uint8(abs_sobel64f)
plt.subplot(1, 3, 1), plt.imshow(img, cmap='gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(1, 3, 2), plt.imshow(sobelx8u, cmap='gray')
plt.title('Sobel CV_8U'), plt.xticks([]), plt.yticks([])
plt.subplot(1, 3, 3), plt.imshow(sobel_8u, cmap='gray')
plt.title('Sobel abs(CV_64F)'), plt.xticks([]), plt.yticks([])
plt.show()
if __name__ == "__main__":
image_gradients2()
检查结果如下:
其它资源
练习
参考文档
Image Gradients
Done.