ROS功能包在线把速腾聚创点云格式转为velodyne点云格式
国外算法很多slam算法是基于velodyne_lidar开发的,对国内雷达型号不友好,在这里记录一下使用rs_to_velodyne功能包实时在线将速腾聚创点云转化为velodyne点云的过程
环境:ubuntu16.04+ROSkinetic+robosense16线(其他版本的ros和速腾雷达过程相似可供参考)
一、安装依赖
sudo apt-get install libpcap-dev二、安装最新的速腾聚创驱动(robosense16老版的驱动没有ring和timestamp参数)
V1.3.0下载:https://github.com/RoboSense-LiDAR/rslidar_sdk/releases
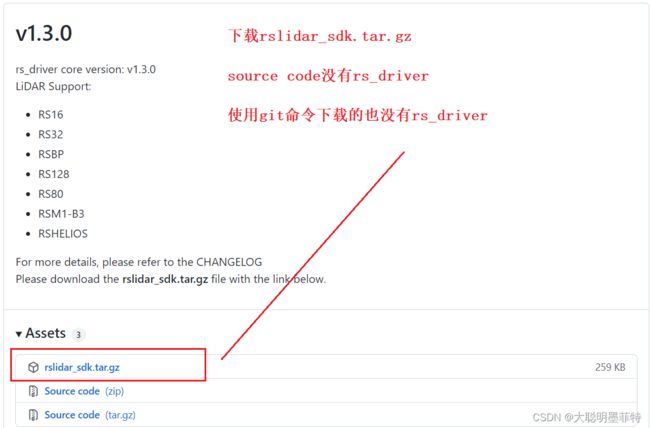
将包解压到RS_SDK/src/下
三、修改CMakeLists.txt和package.xml
修改rslidar_sdk/下的CMakeLists.txt将第八行的set(COMPILE_METHOD ORIGINAL)改为set(COMPILE_METHOD CATKIN)
修改第13行set(POINT_TYPE XYZI) 改为set(POINT_TYPE XYZIRT)
注释掉Protobu相关项122行到146行
修改rslidar_sdk工程目录下的package_ros1.xml文件重命名为package.xml
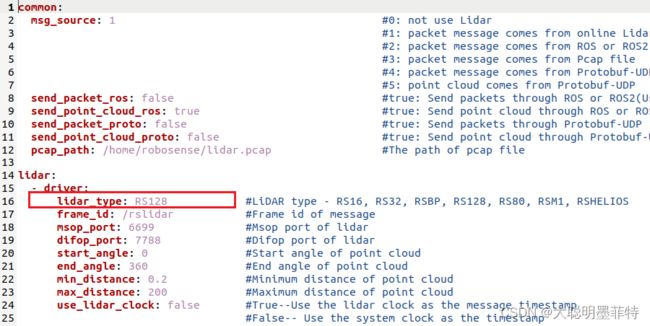
修改rslidar_sdk/config/config.yaml 默认是RS128线雷达改为你的雷达即可16线为RS16
四、编译
catkin_make //后来我在ubuntu20.04上编译失败了,具体错误如第五步所示
//添加环境变量
source /home/lds/RS_SDK/devel/setup.bash
// /home/lds/是我的工作路径你可以在当前工作空间RS_SDK里打开终端输入pwd查看自己的路径
五、题外话(编译bug,如果你编译成功就跳过步骤五)
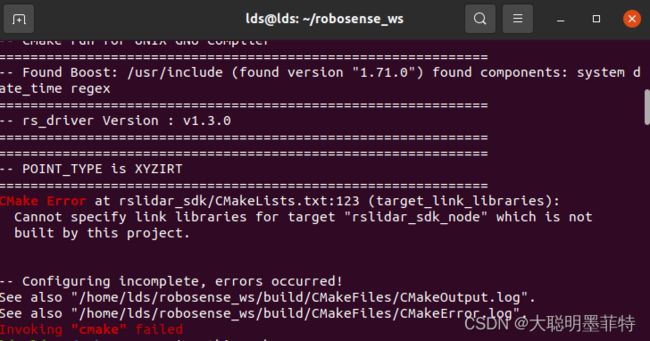
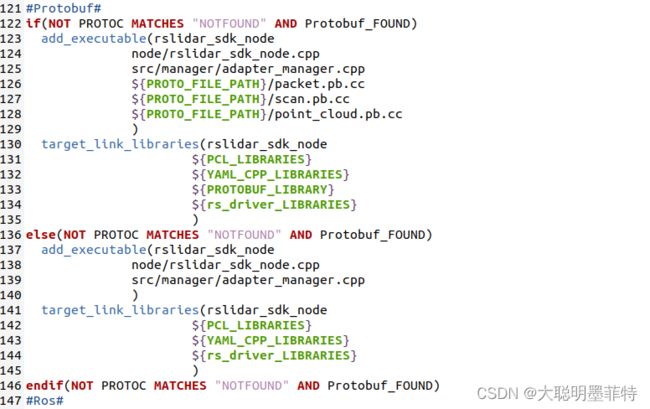
将注释掉的Protobu相关项122行到146行替换成如下内容
if(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)
add_executable(rslidar_sdk_node
node/rslidar_sdk_node.cpp
src/manager/adapter_manager.cpp
${PROTO_FILE_PATH}/packet.pb.cc
${PROTO_FILE_PATH}/scan.pb.cc
${PROTO_FILE_PATH}/point_cloud.pb.cc
)
target_link_libraries(rslidar_sdk_node yaml-cpp)
target_link_libraries(rslidar_sdk_node
${PCL_LIBRARIES}
${YAML_CPP_LIBRARIES}
${PROTOBUF_LIBRARY}
${rs_driver_LIBRARIES}
)
else(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)
add_executable(rslidar_sdk_node
node/rslidar_sdk_node.cpp
src/manager/adapter_manager.cpp
)
target_link_libraries(rslidar_sdk_node yaml-cpp)
target_link_libraries(rslidar_sdk_node
${PCL_LIBRARIES}
${YAML_CPP_LIBRARIES}
${rs_driver_LIBRARIES}
)
endif(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)六、设置ip地址
robosense16出厂默认ip地址是192.168.1.200,你需要将你的计算机ip设置为前三段与雷达相同即192.168.1.开头,最后一位取0-255之间不与雷达的ip相同即可。如果你对激光雷达的使用过程不熟悉可参考我的另一篇博客robosense16使用保姆教学
设置ubuntu的IP地址为:192.168.1.100子网掩码为:255.255.255.0
重启网络以便使新ip生效
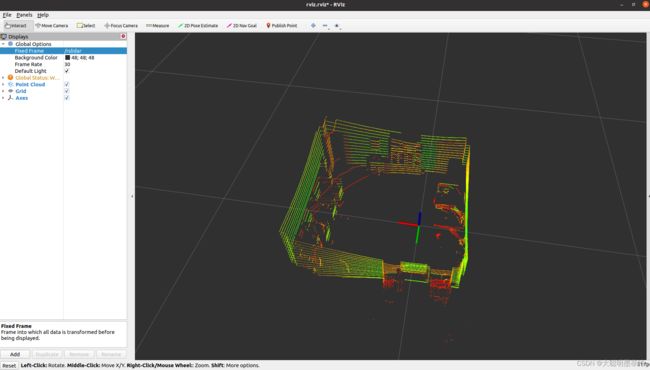
sudo service network-manager restart七、启动雷达(正常显示后即可关闭)
source devel/setup.bash
roslaunch rslidar_sdk start.launch八、安装rs_to_velodyne功能包
打开RS_SDK/src/位置与rslidar_sdk并列新建workspace/src/安装rs_to_velodyne功能包并编译
cd ~/RS_SDK/src
mkdir transition/src
cd transition/src
git clone https://hub.fastgit.org/HViktorTsoi/rs_to_velodyne.git
cd ..
catkin_make在transition/src/rs_to_velodyne/下与src并列的位置新建launch文件夹,在此处右键新开终端:
touch rstovelodyne.launchrstovelodyne.launch写入:
九、启动rs_to_velodyne转化节点
cd ~/RS_SDK/src/transition
source devel/setup.bash
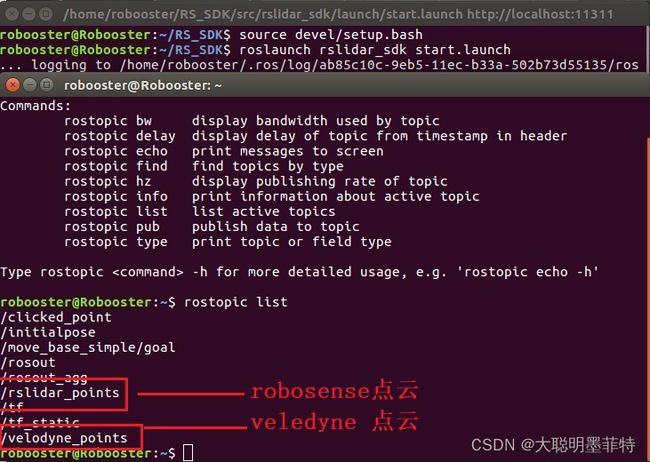
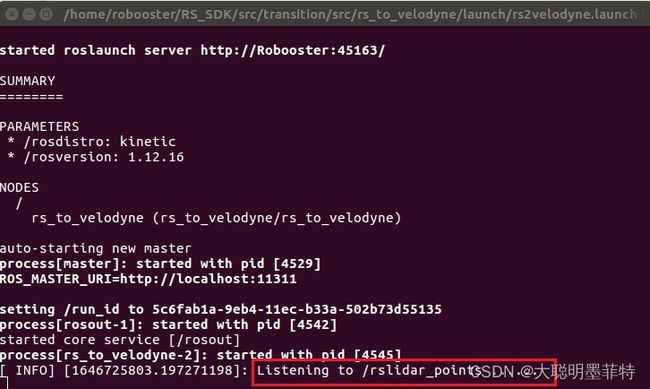
roslaunch rs_to_velodyne rstovelodyne.launch启动转化节点成功
十、集成launch
打开RS_SDK/src/rslidar_sdk/launch/start.launch在末尾将启动转化节点的launch加进去
十一、启动rslidar
cd ~/RS_SDK
source devel/setup.bash
roslaunch rslidar_sdk start.launch