非最大值抑制(NMS)(一)
1.什么是非最大值抑制,为什么使用它?
非最大值抑制是一种主要用于目标检测的技术,其目的是从一组重叠框中选择出最佳的边界框。
首先,目标检测与图像分类不同,图像分类往往只有一个输出,但目标检测的输出个数却是未知的。除了Ground-Truth(标注数据)训练,模型永远无法百分百确信自己要在一张图上预测多少物体。
所以目标检测问题的老大难问题之一就是如何提高召回率。召回率(Recall)是模型找到所有某类目标的能力(所有标注的真实边界框有多少被预测出来了)。检测时按照是否检出边界框与边界框是否存在,可以分为下表四种情况:

召回率是所有某类物体中被检测出的概率,并由下式给出:

为了提高这个值,很直观的想法是“宁肯错杀一千,绝不放过一个”。因此在目标检测中,模型往往会提出远高于实际数量的区域提议(Region Proposal,SSD等one-stage的Anchor也可以看作一种区域提议)。
这就导致最后输出的边界框数量往往远大于实际数量,而这些模型的输出边界框往往是堆叠在一起的。因此,我们需要NMS从堆叠的边框中挑出最好的那个。
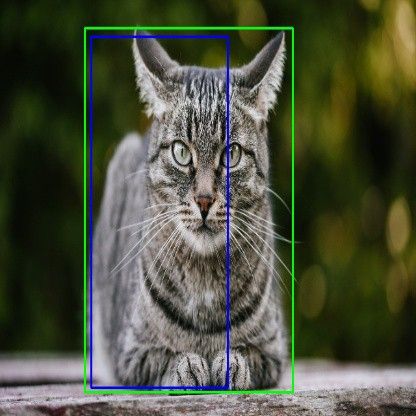
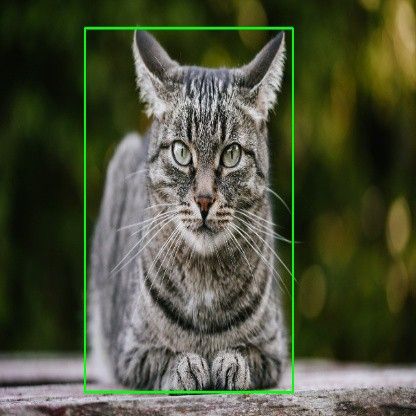
在下图中,非最大值抑制的目的是移除黄色和蓝色框,这样我们就只剩下绿色框了。

2.NMS的计算过程:
2.1解释使用的术语:
- 我们将使用的每个边界框的格式如下:
bbox = [x1, y1, x2, y2, class, confidence]. - 假设对于这个图像我们有一个3个边界框列表;
i.e bbox_list = [blue_box, yellow_box, green_box].green_box = [x1, y1, x2, y2, ”Cat”, 0.9]blue_box = [x3, y3, x4, y4, ”Cat”, 0.85]yellow_box = [x5, y5, x6, y6, ”Cat”, 0.75]
2.2 分阶段滤除boxes
2.2.1第 1 阶段(初步移除boxes):
- 作为NMS的第一步,我们按照置信度对框进行降序排序。这给了我们:
bbox_list = [green_box, blue_box, yellow_box] - 然后定义置信阈值。任何置信值低于此阈值的框都将被删除。对于本例,让我们假设置信阈值为0.8。使用这个阈值,我们将删除黄色框,因为它的置信度< 0.8。这就给我们留下了:
bbox_list = [green_box, blue_box]
2.2.1第 2 阶段(比较boxes的IOU):
- 由于方框按照置信度降序排列,我们知道列表中的第一个方框具有最高的置信度。我们从列表中删除第一个框,并将其添加到一个新列表中。在本例中,我们将删除绿色框,并将其放入一个新列表中,例如bbox_list_new。
- 在这个阶段,我们为 IOU 定义了一个额外的阈值。此阈值用于删除具有高重叠的框。其推理如下:如果两个框有大量重叠,并且它们也属于同一类,则两个框很可能覆盖同一对象。由于目标是每个对象有一个框,我们尝试删除置信度较低的框。
- 对于我们的示例,假设我们的 IOU 阈值为 0.5
- 我们现在开始计算 绿色框与bbox_list 中也具有相同类的每个剩余框的 IOU。在我们的例子中,我们将只计算蓝色框与绿色框的 IOU。
- 如果绿框和蓝框的 IOU 大于我们定义的阈值 0.5,我们将移除蓝框,因为它具有较低的置信度,并且也有显着的重叠。
- 对图像中的每个框重复此过程,以仅得到具有高置信度的唯一框。
2.3算法
- 1.为confence_threshold和IOU_Threshold定义一个值。
- 2.按置信度的降序对边界框进行排序。
- 3.删除置信度 < Confidence_Threshold 的框
- 4.循环所有剩余的框,首先从具有最高置信度的框开始。
- 5.计算当前框与属于同一类的所有剩余框的 IOU。
- 6.如果 2 个框的 IOU > IOU_Threshold,则从我们的框列表中删除置信度较低的框。
- 7.重复此操作,直到我们遍历完列表中的所有框。
2.4 代码实现
下面的代码是执行NMS的基本功能。可以优化以下计算 NMS 的代码以提高性能。
def nms(boxes, conf_threshold=0.7, iou_threshold=0.4):
"""
该函数对框列表执行 nms:
boxes: [box1, box2, box3...]
box1: [x1, y1, x2, y2, Class, Confidence]
"""
bbox_list_thresholded = [] # 按置信度过滤后包含框的列表
bbox_list_new = [] # 包含 nms 之后的最终框的列表
# 第 1 阶段:(对框进行排序,并过滤掉置信度低的框)
boxes_sorted = sorted(boxes, reverse=True, key = lambda x : x[5]) # 根据置信度对框进行排序
for box in boxes_sorted:
if box[5] > conf_threshold: # 检查方框的置信度是否大于阈值
bbox_list_thresholded.append(box) # 将框附加到bbox_list_thresholded列表
else:
pass
#第 2 阶段:(循环遍历所有框,并删除 IOU 高的框)
while len(bbox_list_thresholded) > 0:
current_box = bbox_list_thresholded.pop(0) # 移除最高置信度的包围框
bbox_list_new.append(current_box) # 将其附加到最终框bbox_list_new列表中
for box in bbox_list_thresholded:
if current_box[4] == box[4]: # 检查两个框是否属于同一类
iou = IOU(current_box[:4], box[:4]) # 计算两个包围框的IOU
if iou > iou_threshold: # 检查iou是否大于定义的阈值
bbox_list_thresholded.remove(box) # 如果有显著重叠,则删除框
return bbox_list_new
2.5 代码解析
- 1.该函数将特定图像的框列表、置信阈值和 iou 阈值作为输入。 (我已将它们的默认值分别设置为 0.7 和 0.4)
- 2.我们创建了 2 个名为
bbox_list_thresholded和bbox_list_new的列表。bbox_list_thresholded:包含过滤低置信度框后的新框列表bbox_list_new:包含执行NMS后的最终box列表 - 3.我们通过按置信度降序对框列表进行排序来开始阶段 1,并将新列表存储在变量
box_sorted中。名为 sorted 的Python 内置函数遍历我们的框列表,并根据我们指定的关键字对其进行排序。在我们的例子中,我们指定关键字reverse=True以降序对列表进行排序。第二个关键字 key 指定我们要用于排序的约束。我们使用的lambda 函数提供了一个映射,该映射返回每个边界框的第 5 个元素(置信度)。 sorted 函数在遍历每个框时,会查看 lambda 函数,该函数将返回框的第 5 个元素(置信度),并以相反的顺序对其进行排序。 - 4.我们迭代所有已排序的框,并删除置信度低于我们设置的阈值的框(conf_threshold=0.7)
- 5.在第 2 阶段,我们将阈值框列表(
bbox_list_thresholded)中的所有框一一循环,直到列表被清空。 我们首先从这个列表(current_box)中删除(弹出)第一个框,因为它具有最高的置信度,并将其附加到我们的最终列表(bbox_list_new)。 - 6.然后我们遍历列表
bbox_list_thresholded中所有剩余的框,并检查它们是否与当前框属于同一类。 (box[4] 对应类) - 7.如果两个框属于同一类,我们计算这些框之间的 IOU(我们将 box[:4] 传递给 IOU 函数,因为它对应于 (x1, y1, x2, y2) 的值,因为我们的 IOU函数不需要类别和置信度)。
- 8.如果 IOU > iou_threshold,我们从列表 bbox_list_thresholded 中删除该框,因为该框是IOU较大的框。
- 9.在NMS之后,我们返回更新的框列表。
3.样例
import cv2
import numpy as np
def draw_boxes(frame, bbox_list, color=(255,0,0)):
"""绘制框列表中的所有框,并显示置信度
bbox_list = [box1,box2,box3....etc]
box1 = [x1, y1, x2, y2, Class, confidence]
要绘制框,我们只需要坐标,
box1[:4] = [x1, y1, x2, y2]
box1[5] = confidence"""
for box in bbox_list:
x1, y1, x2, y2 = box[:4] # 我们只需要 (x1, y1) 和 (x2, y2) 坐标
conf = box[5]
cv2.rectangle(frame, pt1=(x1, y1), pt2=(x2, y2), color=color, thickness=2)
frame = cv2.putText(frame, str(conf), (x1, y1-5), cv2.FONT_HERSHEY_SIMPLEX , 0.5,
(255, 255, 255), 1, cv2.LINE_AA) # 在图像上绘制IOU
return frame
def IOU(boxA, boxB):
""" 我们假设框遵循以下格式:
box1 = [x1,y1,x2,y2], and box2 = [x3,y3,x4,y4],
其中 (x1,y1) 和 (x3,y3) 表示左上角坐标
(x2,y2) 和 (x4,y4) 代表右下角坐标 """
# 确定相交矩形的 (x, y) 坐标
xA = max(boxA[0], boxB[0])
yA = max(boxA[1], boxB[1])
xB = min(boxA[2], boxB[2])
yB = min(boxA[3], boxB[3])
# 计算相交矩形的面积
interArea = max(0, xB - xA + 1) * max(0, yB - yA + 1)
# 计算预测和真实矩形的面积
boxAArea = (boxA[2] - boxA[0] + 1) * (boxA[3] - boxA[1] + 1)
boxBArea = (boxB[2] - boxB[0] + 1) * (boxB[3] - boxB[1] + 1)
# 通过取交集区域并将其除以预测 + 真实区域 - 交集区域的总和来计算并集交集
iou = interArea / float(boxAArea + boxBArea - interArea)
return iou
def nms(boxes, conf_threshold=0.7, iou_threshold=0.4):
"""
该函数对框列表执行 nms:
boxes: [box1, box2, box3...]
box1: [x1, y1, x2, y2, Class, Confidence]
"""
bbox_list_thresholded = [] # 按置信度过滤后包含框的列表
bbox_list_new = [] # 包含 nms 之后的最终框的列表
# 第 1 阶段:(对框进行排序,并过滤掉置信度低的框)
boxes_sorted = sorted(boxes, reverse=True, key = lambda x : x[5]) # 根据置信度对框进行排序
for box in boxes_sorted:
if box[5] > conf_threshold: # 检查方框的置信度是否大于阈值
bbox_list_thresholded.append(box) # 将框附加到bbox_list_thresholded列表
else:
pass
#第 2 阶段:(循环遍历所有框,并删除 IOU 高的框)
while len(bbox_list_thresholded) > 0:
current_box = bbox_list_thresholded.pop(0) # 移除最高置信度的包围框
bbox_list_new.append(current_box) # 将其附加到最终框bbox_list_new列表中
for box in bbox_list_thresholded:
if current_box[4] == box[4]: # 检查两个框是否属于同一类
iou = IOU(current_box[:4], box[:4]) # 计算两个包围框的IOU
if iou > iou_threshold: # 检查iou是否大于定义的阈值
bbox_list_thresholded.remove(box) # 如果有显著重叠,则删除框
return bbox_list_new
def main():
img = cv2.imread("Images/img.jpg") # 读取图像
img = cv2.resize(img, (416, 416)) # 调整要在屏幕上显示的图像的大小
img_nms = img.copy() # 创建图像的副本以在其上绘图
bbox_dog1 = [90, 261, 228, 378, "Dog", 0.9] # 定义不同的边界框
bbox_dog2 = [121, 290, 216, 374, "Dog", 0.6]
bbox_dog3 = [49, 265, 243, 388, "Dog", 0.85]
bbox_person1 = [234, 91, 359, 370, "Person", 0.95]
bbox_person2 = [239, 116, 359, 374, "Person", 0.45]
bbox_person3 = [234, 71, 359, 370, "Person", 0.92]
bbox_list = [bbox_dog1, bbox_dog2, bbox_dog3, bbox_person1, bbox_person2, bbox_person3] # 创建框的列表
bbox_list_new = nms(bbox_list, conf_threshold=0.7, iou_threshold=0.4) # 调用该函数执行NMS
img = draw_boxes(img, bbox_list) # 绘制nms之前的所有框
img_nms = draw_boxes(img_nms, bbox_list_new) # 绘制nms后的所有框
img = cv2.putText(img, str("Before NMS"), (30, 30), cv2.FONT_HERSHEY_SIMPLEX , 1, # 写在nms之前的图像上
(0, 0, 0), 2, cv2.LINE_AA)
img_nms = cv2.putText(img_nms, str("After NMS"), (30, 30), cv2.FONT_HERSHEY_SIMPLEX , 1, # 写在nms之后图像上
(0, 0, 0), 2, cv2.LINE_AA)
cv2.imwrite("img.jpg", np.hstack((img, img_nms))) # 保存图像
cv2.imshow("IMG", np.hstack((img, img_nms))) # 水平堆叠图像并显示
cv2.waitKey() # 等待按任意键退出
if __name__ == "__main__":
main()
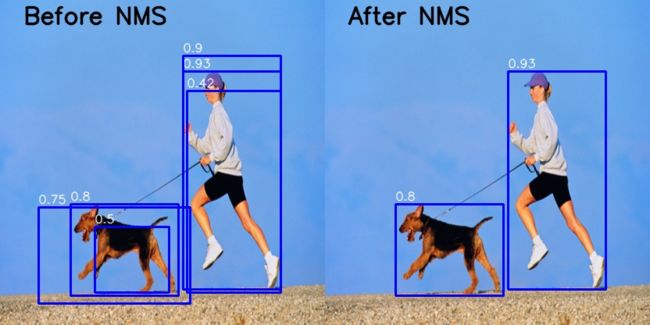
4.结果展示
原图:

NMS前后图:
参考目录
https://medium.com/analytics-vidhya/non-max-suppression-nms-6623e6572536