自动驾驶数据集KITTI【8】tracking资料下载及2d侦测框绘制
1.tracking资料下载:http://www.cvlibs.net/datasets/kitti/eval_tracking.php
资料保存位置参考:压缩包-解压-放到kitti数据集的RawData同级目录中,如:
2.安装jupyter notebook前需要更新pygments
pip3 install --upgrade pygments
3.)使用jupyter notebook工具
安装指令:
sudo pip install jupyter notebook
4.使用时,终端输入:
jupyter notebook
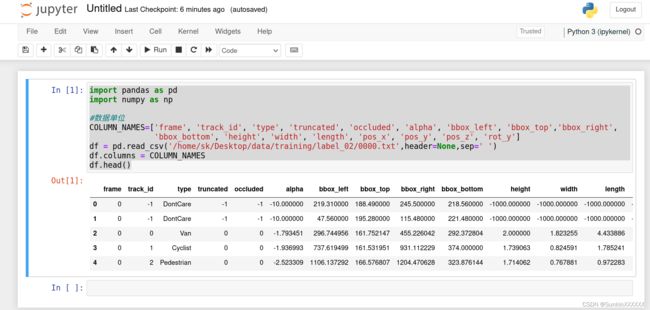
#数据单位
import pandas as pd
import numpy as np
#数据单位
COLUMN_NAMES=['frame', 'track_id', 'type', 'truncated', 'occluded', 'alpha', 'bbox_left', 'bbox_top','bbox_right',
'bbox_bottom', 'height', 'width', 'length', 'pos_x', 'pos_y', 'pos_z', 'rot_y']
df = pd.read_csv('/home/sk/Desktop/data/training/label_02/0000.txt',header=None,sep=' ')
df.columns = COLUMN_NAMES
df.head()#head()方法,默认读取前五行,如果想显示更多,那么在括号内赋值
df.type.isin(['Truck','Van','Tram'])
df.loc[df.type.isin(['Truck','Van','Tram']),'type']='Car'
df = df[df.type.isin(['Car','Pedestrian','Cyclist'])]
df
df.loc[2,['bbox_left' ,'bbox_top','bbox_right','bbox_bottom']]
box=np.array(df.loc[2,['bbox_left' ,'bbox_top','bbox_right','bbox_bottom']])
box
import cv2
image = cv2.imread('/home/sk/Desktop/data/kitti/2011_09_26/2011_09_26_drive_0005_sync/image_00/data/0000000000.png')
import cv2
image = cv2.imread('/home/sk/Desktop/data/kitti/2011_09_26/2011_09_26_drive_0005_sync/image_00/data/0000000000.png')
top_left = int(box[0]),int(box[1])
bottom_right = int(box[2]),int(box[3])
cv2.rectangle(image,top_left,bottom_right,(255,255,0),2)
cv2.imshow("image",image)
cv2.waitKey(0)
cv2.destroyAllWindows()
5.效果展示: