VC++ K-Means 图像二值化
K-MEANS算法的工作原理及流程
K-MEANS算法:
输入:聚类个数k,以及包含 n个数据对象的数据库。
输出:满足方差最小标准的k个聚类
处理流程
(1) 从 n个数据对象任意选择 k 个对象作为初始聚类中心;
(2) 根据每个聚类对象的均值(中心对象),计算每个对象与这些中心对象的距离;并根据最小距离重新对相应对象进行划分;
(3) 重新计算每个(有变化)聚类的均值(中心对象)
(4) 循环(2)到(3)直到每个聚类不再发生变化为止
k-means 算法接受输入量 k ;然后将n个数据对象划分为 k个聚类以便使得所获得的聚类满足:同一聚类中的对象相似度较高;而不同聚类中的对象相似度较小。聚类相似度是利用各聚类中对象的 均值所获得一个“中心对象”(引力中心)来进行计算的。
工作过程k-means 算法的工作过程
说明如下:首先从n个数据对象任意选择 k 个对象作为初始聚类中心;而对于所剩下其它对象,则根据它们与这些聚类中心的相似度(距离),分别将它们分配给与其最相似的(聚类中心所代表的)聚类;然 后再计算每个所获新聚类的聚类中心(该聚类中所有对象的均值);不断重复这一过程直到标准测度函数开始收敛为止。一般都采用均方差作为标准测度函数。k个聚类具有以下特点:各聚类本身尽可能的紧凑,而各聚类之间尽可能的分开。
K-MEANS 二值化,把图像分成两类,设置中心(随机选择中心点像素值, rand()%256 )
8位灰度图像 center1 =rand()%256, center2 =rand()%256
计算各像素点到中心聚类的距离,并根据最小距离重新对相应对象进行划分,重新计算每个(有变化)聚类的均值(中心对象),循环直到每个聚类不再发生变化为止。 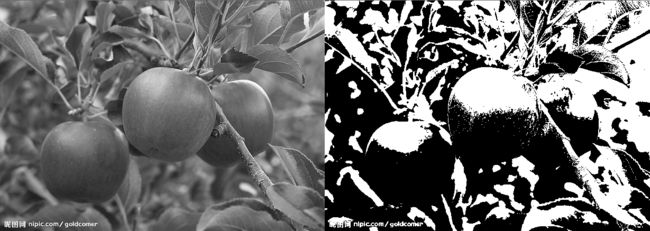
void CShowPicView::OnKmeans()
{
CShowPicDoc* pDoc = GetDocument();
CDC* pDC=GetDC();
srand((unsigned int)time(NULL));
int center1=rand()%256,center2=rand()%256, distance1 = 0,distance2 =0;
int temp_center1 =0,temp_center2=0;
int i=0,j=0;
bool convergence = 1;
do{
double center1_count = 0,center2_count = 0, count1 = 0, count2 = 0;
for(j = 0; j < intHeight; j++)//将图像中各像素值及特征读取出来
{
for(i = 0; i < intWidth; i++)
{
distance1 = abs(center1-Data[j][i]);
distance2 = abs(center2-Data[j][i]);
if(distance1
abs(center2-Data[j][i]) ? pDC->SetPixel(i+intWidth,j,RGB(255,255,255)) : pDC->SetPixel(i+intWidth,j,RGB(0,0,0));
delete pDoc;
ReleaseDC(pDC);
pDoc = NULL;
pDC = NULL;
}
24位彩色度图像 center1 (R_center1, G_center1, B_center1), center2 ( R_center2 , G_center2 , B_center2 )
计算各像素点到中心聚类的距离,并根据最小距离重新对相应对象进行划分,重新计算每个(有变化)聚类的均值(中心对象),循环直到每个聚类不再发生变化为止。

void CShowPicView::OnKMeansImageSegmentation()
{
CShowPicDoc* pDoc = GetDocument();
CDC* pDC=GetDC();
srand((unsigned int)time(NULL));
int R_center1=rand()%256,R_center2=rand()%256;
int G_center1=rand()%256,G_center2=rand()%256;
int B_center1=rand()%256,B_center2=rand()%256;
int R_temp_center1 =0,R_temp_center2=0;
int G_temp_center1 =0,G_temp_center2=0;
int B_temp_center1 =0,B_temp_center2=0;
int i=0,j=0;
double distance1 = 0,distance2 =0;
bool convergence = 1;
do{
double R_center1_count = 0, R_center2_count = 0, R_count1 = 0, R_count2 = 0;
double G_center1_count = 0, G_center2_count = 0, G_count1 = 0, G_count2 = 0;
double B_center1_count = 0, B_center2_count = 0, B_count1 = 0, B_count2 = 0;
//pDC->SetPixel(x,y,RGB(pDoc->pic[y][x][0],pDoc->pic[y][x][1],pDoc->pic[y][x][2]));
for(j = 0; j < intHeight; j++)//将图像中各像素值及特征读取出来
{
for(i = 0; i < intWidth; i++)
{
distance1 = sqrt( pow((R_center1-pDoc->pic[j][i][0]),2)+pow((G_center1-pDoc->pic[j][i][1]),2)+pow((B_center1-pDoc->pic[j][i][2]),2) );
distance2 = sqrt( pow((R_center2-pDoc->pic[j][i][0]),2)+pow((G_center2-pDoc->pic[j][i][1]),2)+pow((B_center2-pDoc->pic[j][i][2]),2) );
if(distance1
pic[j][i][0]; R_count1++;
G_center1_count+=pDoc->pic[j][i][1]; G_count1++;
B_center1_count+=pDoc->pic[j][i][2]; B_count1++;
}
else{
R_center2_count+=pDoc->pic[j][i][0]; R_count2++;
G_center2_count+=pDoc->pic[j][i][1]; G_count2++;
B_center2_count+=pDoc->pic[j][i][2]; B_count2++;
}
}
}
R_temp_center1 = int(R_center1_count/R_count1); R_temp_center2 = int(R_center2_count/R_count2);
G_temp_center1 = int(G_center1_count/G_count1); G_temp_center2 = int(G_center2_count/G_count2);
B_temp_center1 = int(B_center1_count/B_count1); B_temp_center2 = int(B_center2_count/B_count2);
if( abs(R_temp_center1-R_center1)<0.1&&abs(R_temp_center2-R_center2)<0.1
&&abs(G_temp_center1-G_center1)<0.1&&abs(G_temp_center2-G_center2)<0.1
&&abs(B_temp_center1-B_center1)<0.1&&abs(B_temp_center2-B_center2)<0.1)
convergence = 0;
else
{
R_center1 = R_temp_center1; R_center2 = R_temp_center2;
G_center1 = G_temp_center1; G_center2 = G_temp_center2;
B_center1 = B_temp_center1; B_center2 = B_temp_center2;
}
}while(convergence);
for(j = 0; j < intHeight; j++)//将图像中各像素值及特征读取出来
for(i = 0; i < intWidth; i++)
{
distance1 = sqrt( pow((R_center1-pDoc->pic[j][i][0]),2)+pow((G_center1-pDoc->pic[j][i][1]),2)+pow((B_center1-pDoc->pic[j][i][2]),2) );
distance2 = sqrt( pow((R_center2-pDoc->pic[j][i][0]),2)+pow((G_center2-pDoc->pic[j][i][1]),2)+pow((B_center2-pDoc->pic[j][i][2]),2) );
distance1 > distance2 ? pDC->SetPixel(i+intWidth,j,RGB(255,255,255)) : pDC->SetPixel(i+intWidth,j,RGB(0,0,0));
}
delete pDoc;
ReleaseDC(pDC);
pDoc = NULL;
pDC = NULL;
}
24位彩色度图像 ,分别对三通道的颜色R,G,B做单通道聚类,每通道二值化,结果会产生最多8个聚类结果。
(R_center1,R_center2) ,(G_center1,G_center2) ,(B_center1 ,B_center2) 
void CShowPicView::OnKMeansimagesegmentation()
{
CShowPicDoc* pDoc = GetDocument();
CDC* pDC=GetDC();
srand((unsigned int)time(NULL));
int R_center1=rand()%256,R_center2=rand()%256;
int G_center1=rand()%256,G_center2=rand()%256;
int B_center1=rand()%256,B_center2=rand()%256;
int R_temp_center1 =0,R_temp_center2=0;
int G_temp_center1 =0,G_temp_center2=0;
int B_temp_center1 =0,B_temp_center2=0;
int i=0,j=0;
int distance1 = 0,distance2 =0;
bool convergence = 1;
do{
double R_center1_count = 0, R_center2_count = 0, R_count1 = 0, R_count2 = 0;
double G_center1_count = 0, G_center2_count = 0, G_count1 = 0, G_count2 = 0;
double B_center1_count = 0, B_center2_count = 0, B_count1 = 0, B_count2 = 0;
//pDC->SetPixel(x,y,RGB(pDoc->pic[y][x][0],pDoc->pic[y][x][1],pDoc->pic[y][x][2]));
for(j = 0; j < intHeight; j++)//将图像中各像素值及特征读取出来
{
for(i = 0; i < intWidth; i++)
{
distance1 = abs(R_center1-pDoc->pic[j][i][0]); distance2 = abs(R_center2-pDoc->pic[j][i][0]);
if(distance1
pic[j][i][0]; R_count1++;
}
else{
R_center2_count+=pDoc->pic[j][i][0]; R_count2++;
}
distance1 = abs(G_center1-pDoc->pic[j][i][1]); distance2 = abs(G_center2-pDoc->pic[j][i][1]);
if(distance1
pic[j][i][1]; G_count1++;
}
else{
G_center2_count+=pDoc->pic[j][i][1]; G_count2++;
}
distance1 = abs(B_center1-pDoc->pic[j][i][2]); distance2 = abs(B_center2-pDoc->pic[j][i][2]);
if(distance1
pic[j][i][2]; B_count1++;
}
else{
B_center2_count+=pDoc->pic[j][i][2]; B_count2++;
}
}
}
R_temp_center1 = int(R_center1_count/R_count1); R_temp_center2 = int(R_center2_count/R_count2);
G_temp_center1 = int(G_center1_count/G_count1); G_temp_center2 = int(G_center2_count/G_count2);
B_temp_center1 = int(B_center1_count/B_count1); B_temp_center2 = int(B_center2_count/B_count2);
if( abs(R_temp_center1-R_center1)<0.1&&abs(R_temp_center2-R_center2)<0.1
&&abs(G_temp_center1-G_center1)<0.1&&abs(G_temp_center2-G_center2)<0.1
&&abs(B_temp_center1-B_center1)<0.1&&abs(B_temp_center2-B_center2)<0.1)
convergence = 0;
else
{
R_center1 = R_temp_center1; R_center2 = R_temp_center2;
G_center1 = G_temp_center1; G_center2 = G_temp_center2;
B_center1 = B_temp_center1; B_center2 = B_temp_center2;
}
}while(convergence);
int temp1=0,temp2=0,temp3=0;
for(j = 0; j < intHeight; j++)//将图像中各像素值及特征读取出来
for(i = 0; i < intWidth; i++)
{
distance1 = abs(R_center1-pDoc->pic[j][i][0])+abs(G_center1-pDoc->pic[j][i][1])+abs(B_center1-pDoc->pic[j][i][2]);
distance2 = abs(R_center2-pDoc->pic[j][i][0])+abs(G_center2-pDoc->pic[j][i][1])+abs(B_center2-pDoc->pic[j][i][2]);
distance1 > distance2 ? pDC->SetPixel(i+2*intWidth,j,RGB(255,255,255)) : pDC->SetPixel(i+2*intWidth,j,RGB(0,0,0));
abs(R_center1-pDoc->pic[j][i][0])>abs(R_center2-pDoc->pic[j][i][0]) ? temp1=255 : temp1=0 ;
abs(G_center1-pDoc->pic[j][i][1])>abs(G_center2-pDoc->pic[j][i][1]) ? temp2=255 : temp2=0 ;
abs(B_center1-pDoc->pic[j][i][2])>abs(B_center2-pDoc->pic[j][i][2]) ? temp3=255 : temp3=0 ;
pDC->SetPixel(i+intWidth,j,RGB(temp1,temp2,temp3));
}
// delete pDoc;
// ReleaseDC(pDC);
// pDoc = NULL;
// pDC = NULL;
}
https://github.com/wukai0909/Image-Processing-Segmentation/tree/master