QT5.13.1--opencv3.4.2--配置海康摄像头--Windows
环境介绍
- 安装好QT5.13.1,安装过程看我的QT5.13.1的安装文档
- 安装好MVS,这个百度下去官网下载即可。
- 配置好MSVC的环境,不能是MinGW的环境,不然配置不成功!!!这个的配置也可以参考我的MSVC2017安装文档。
- 配置QT的opencv环境,我这边配置的是opencv3.4.2
MVS需要验证,这个需要有权限
下面开始配置opencv–QT版本
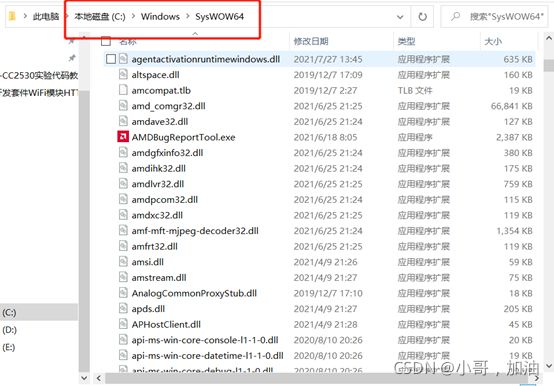
找到下面对应的文件
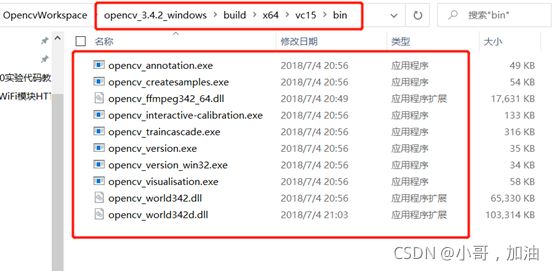
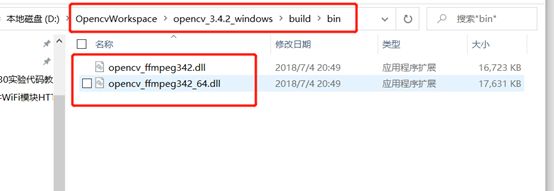
复制上面的所有文件,然后拷贝到C:\Windows\SysWOW64这个文件夹下
然后创建QT工程,QT工程自己创建一个。然后找到工程文件,添加环境配置。
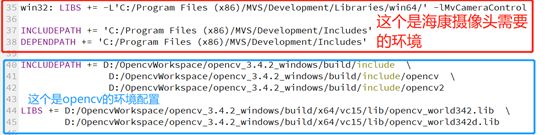
对着下面改,改成自己的对应的文件路径
win32: LIBS += -L’C:/Program Files(x86)/MVS/Development/Libraries/win64/’ -lMvCameraControl
INCLUDEPATH += ‘C:/Program Files (x86)/MVS/Development/Includes’
DEPENDPATH += ‘C:/Program Files (x86)/MVS/Development/Includes’
INCLUDEPATH+=D:/OpencvWorkspace/opencv_3.4.2_windows/build/include \ D:/OpencvWorkspace/opencv_3.4.2_windows/build/include/opencv \ D:/OpencvWorkspace/opencv_3.4.2_windows/build/include/opencv2
LIBS+=D:/OpencvWorkspace/opencv_3.4.2_windows/build/x64/vc15/lib/opencv_world342.lib \ D:/OpencvWorkspace/opencv_3.4.2_windows/build/x64/vc15/lib/opencv_world342d.lib
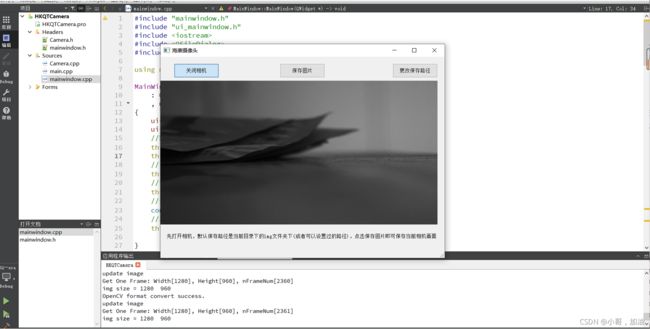
然后就可以使用海康摄像头了。
我这边对海康摄像头的代码进行了二次封装,可以通过一个函数即可获取到Mat对象。
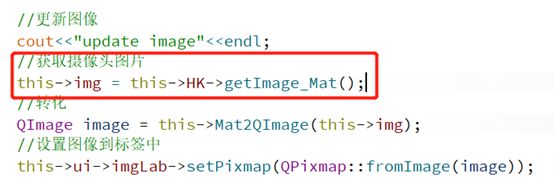
上面的getImage_Mat就可以获取到当前摄像头拍摄的画面。
代码如下:
Camera.h
#include "MvCameraControl.h"
#include Camera.cpp
#include "Camera.h"
#include 连接海康摄像头可以采用下面的默认配置
//连接海康摄像头
this->HK = new Camera(OpenCV_Mat, 0);
最后的效果: