FreeRTOS实验使用02
1:队列集使用
主要就是函数xQueueSelectFromSet 返回值的判断,用于判断里面的消息谁有效

Pend (or block) on multiple RTOS queues and semaphores in a set (freertos.org)
官方给的例程更好,更规范
2:任务通知使用
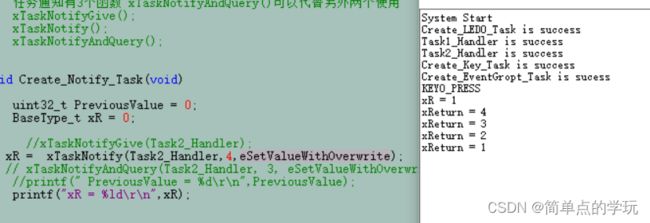
xR = xTaskNotify(Task2_Handler,4,eIncrement); //返回值一直为1,分析源码返回值为pdPASS=1
xReturn = ulTaskNotifyTake(pdFALSE ,portMAX_DELAY );//这个保持不变
 pdTRUE:把通知值清零;pdFALSE:把通知值减一
pdTRUE:把通知值清零;pdFALSE:把通知值减一
更改任务通知方式
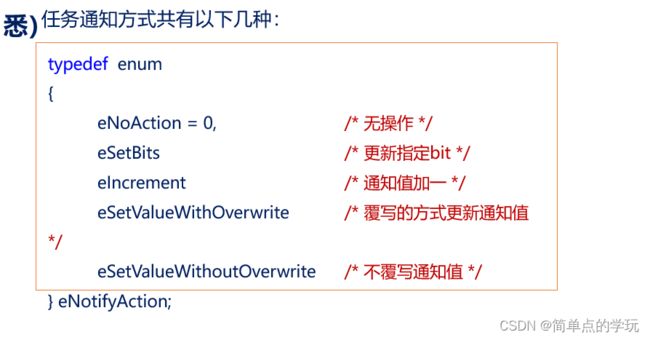
任务通知方式如何理解--分析源码


xTaskGenericNotify()源码分析
BaseType_t xTaskGenericNotify( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction, uint32_t *pulPreviousNotificationValue )
{
TCB_t * pxTCB;
BaseType_t xReturn = pdPASS;
pxTCB = ( TCB_t * ) xTaskToNotify;//xTaskToNotify是任务句柄,接收方
taskENTER_CRITICAL();
{
if( pulPreviousNotificationValue != NULL ) //不为NULL,就保存之前的值
{
*pulPreviousNotificationValue = pxTCB->ulNotifiedValue;
}
switch( eAction ) //任务更新方式
{
case eSetBits :
pxTCB->ulNotifiedValue |= ulValue;//此时的ulValue的值为某一位,把该为置一
break;
case eIncrement :
( pxTCB->ulNotifiedValue )++;//把原先的值加一
break;
case eSetValueWithOverwrite :
pxTCB->ulNotifiedValue = ulValue;//覆盖原来的值
break;
case eSetValueWithoutOverwrite :
if( ucOriginalNotifyState != taskNOTIFICATION_RECEIVED )//如果你是第一次进来就执行if里面的,如果不是则执行下面的,一般都是第一次进来
{
pxTCB->ulNotifiedValue = ulValue;
}
else
{
/* The value could not be written to the task. */
xReturn = pdFAIL;
}
break;
case eNoAction:
/* The task is being notified without its notify value being
updated. */
break;
}
traceTASK_NOTIFY();
taskEXIT_CRITICAL();
return xReturn;
}ulTaskNotifyTake源码分析
uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait )
{
uint32_t ulReturn;
taskENTER_CRITICAL();
{
/* Only block if the notification count is not already non-zero. */
if( pxCurrentTCB->ulNotifiedValue == 0UL )
{
//判断你发送的通知值是否为0,为0表示没发送,那么把此时的状态变成阻塞等待
/* Mark this task as waiting for a notification. */
pxCurrentTCB->ucNotifyState = taskWAITING_NOTIFICATION;
if( xTicksToWait > ( TickType_t ) 0 )
{
prvAddCurrentTaskToDelayedList( xTicksToWait, pdTRUE );
traceTASK_NOTIFY_TAKE_BLOCK();
/* All ports are written to allow a yield in a critical
section (some will yield immediately, others wait until the
critical section exits) - but it is not something that
application code should ever do. */
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
taskENTER_CRITICAL();
{
traceTASK_NOTIFY_TAKE();
ulReturn = pxCurrentTCB->ulNotifiedValue;
if( ulReturn != 0UL )
{
if( xClearCountOnExit != pdFALSE )
{
pxCurrentTCB->ulNotifiedValue = 0UL;//二值信号量情况
}
else
{
pxCurrentTCB->ulNotifiedValue = ulReturn - 1;//然后赋值回去--计数型信号量
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
pxCurrentTCB->ucNotifyState = taskNOT_WAITING_NOTIFICATION;
}
taskEXIT_CRITICAL();
return ulReturn;
}模拟二值信号量
我们只需要关注有没有发通知即可,不需要关注发的内容是啥
xR = xTaskNotifyGive(Task2_Handler); //xR的值为1
xTaskNotifyGive这个函数自带加一,所以接收到了1,然后清零,等待下一次
xReturn = ulTaskNotifyTake(pdTRUE ,portMAX_DELAY ); //xReturn的值为1
pdTRUE清零,为了下次继续,如果改成不清零,改成减一呢?
结果是一样的,发过去为1,再减一,变成0了,就不会继续下一次了,除非我们发的通知值为大于1的值
xR = xTaskNotify(Task2_Handler,4,eNoAction); //结果NotifyTask is fail
分析上面的源码就知道为什么是错误了,因为它啥都没有干,所以错误
xR = xTaskNotify(Task2_Handler,4,eIncrement);//xReturn = 1,为什么不是4呢?因为我没有覆盖,源码上是原来的值加一,而原来的值是0,因此这个4是没用的
xR = xTaskNotify(Task2_Handler,4,eSetValueWithOverwrite);//会打印四次,因为通知值变成了4覆盖了,接收到了4,然后减一,变成了3,此时又满足了,因此接收到了3,除非你清零就不会了
如果只是想单纯的接收值得话,需要更换另外一个接收函数xTaskNotifyWait
模拟计数信号量
发送者10ms延时,接收者1000ms延时,两者需要存在时间差,不然成功不了
任务通知发送键值,接收键值
这里可以衍生到发送其他数据啊等,但是一次性只能发送一个数据
BaseType_t xReturn;
uint32_t pulNotificationValue;
while(1)
{
// xReturn = ulTaskNotifyTake(pdFALSE ,portMAX_DELAY ); //模拟信号量 //pdFALSE pdTRUE
xReturn = xTaskNotifyWait(0,0XFFFF, &pulNotificationValue,portMAX_DELAY);
// switch()
// {
// //对通知值进行操作
// }
if(xReturn == pdTRUE)
{
printf("pulNotificationValue = %ld\r\n",pulNotificationValue);
}
else
{
printf("NotifyTask is fail\r\n");
}任务通知发送设置不同标志位
按键0设置第二位(0X02),按键1设置第三位(0X04)
xTaskNotify(Task2_Handler,0X02,eSetBits);
xTaskNotify(Task2_Handler,0X04,eSetBits);
xReturn = xTaskNotifyWait(0,0XFFFFFFFF, &pulNotificationValue,portMAX_DELAY);
0XFFFFFFFF是把标志位清零,为0的话,上一次的会被记录下来,因此会一直成立打印K0K1
if(pulNotificationValue & 0X02)//如果成立,表示按键0按下
{
printf("K0\r\n");
event_bit |= 0x02;
}
if(pulNotificationValue & 0X04)//如果成立,表示按键1按下
{
printf("K1\r\n");
event_bit |= 0x04;
}
if(event_bit == (0x02 | 0x04 )) //如果成立,表示按键0和按键1都发生了
{
printf("K0K1\r\n");
event_bit = 0;
}低功耗源码分析
#if ( configUSE_TICKLESS_IDLE != 0 )
{
TickType_t xExpectedIdleTime;
/* It is not desirable to suspend then resume the scheduler on
each iteration of the idle task. Therefore, a preliminary
test of the expected idle time is performed without the
scheduler suspended. The result here is not necessarily
valid. */
xExpectedIdleTime = prvGetExpectedIdleTime();//获取下一个任务的解锁时间,即进入低功耗的时间
if( xExpectedIdleTime >= configEXPECTED_IDLE_TIME_BEFORE_SLEEP )
{
//如果大于
vTaskSuspendAll();
{
/* Now the scheduler is suspended, the expected idle
time can be sampled again, and this time its value can
be used. */
configASSERT( xNextTaskUnblockTime >= xTickCount );
xExpectedIdleTime = prvGetExpectedIdleTime();
if( xExpectedIdleTime >= configEXPECTED_IDLE_TIME_BEFORE_SLEEP )
{
traceLOW_POWER_IDLE_BEGIN();
portSUPPRESS_TICKS_AND_SLEEP( xExpectedIdleTime );//这个就是核心函数
traceLOW_POWER_IDLE_END();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
( void ) xTaskResumeAll();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_TICKLESS_IDLE */
}低功耗实际操作
就是操作两个函数即可--自己宏定义的函数
/* 低功耗模式 */
#define configPRE_SLEEP_PROCESSING(x) PRE_SLEEP_PROCESSING()
#define configPOSR_SLEEP_PROCESSING(x) POSR_SLEEP_PROCESSING()