ROS实验笔记之——基于Prometheus的无人机运动规划
本博文基于Prometheus项目来学习无人机的运动规划。关于该项目的配置可以参考《ROS实验笔记之——基于Prometheus自主无人机开源项目的学习与仿真》
Demo演示
基于2D-LiDAR的APF路径规划
基于rgbd camera的APF路径规划
基于3D-LiDAR的Astar路径规划
ego-planner
对于ego-planner,直接下载源码编译即可。
(源码连接:
https://github.com/ZJU-FAST-Lab/ego-planner
https://github.com/ZJU-FAST-Lab/ego-planner-swarm)
注意:编译的时候统一采用
catkin_make -DCMAKE_BUILD_TYPE=Release采用下面命令可能会报错
catkin_make -DCMAKE_BUILD_TYPE=Release -j1仿真过程需要先进入对应的文件,然后运行
source devel/setup.bash
roslaunch ego_planner rviz.launch
注意:添加工作空间的话,可以省略source
对于群机器人可以运行
roslaunch ego_planner swarm.launch对于单机器人可以运行
roslaunch ego_planner run_in_sim.launchecho "source /home/kwanwaipang/ego-planner-swarm-master/devel/setup.sh" >> ~/.bashrc
source ~/.bashrc
仿真视频如下所示
ego-planner复现(基于单无人机)
swarm-ego-planner复现(基于单无人机)
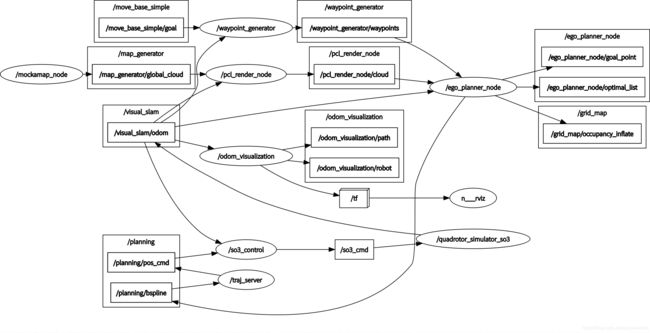
对应的节点图如下
在Prometheus项目中也有ego-planner,但是直接编译好像会出各种的错误,建议采用的方法是:先进入对应的文件里面,然后单独编译ego-planner,然后把对应的devel以及build复制即可(build文件复制后可能会报错,删掉再编译就可以成功)
参考资料
https://zhuanlan.zhihu.com/p/369196042(ego-planner-swarm)
Conflict-based search for optimal multi-agent path finding
ODrM*: Optimal multi-robot path planning in low dimensional search spaces(2013 ICRA)
Reciprocal Velocity Obstacles for real-time multi-agent navigation (http://gamma.cs.unc.edu/RVO/)
Reciprocal n-Body Collision Avoidance (https://gamma.cs.unc.edu/ORCA/)
Cooperative Collision Avoidance for Nonholonomic Robots
Towards cognitive exploration through deep reinforcement learning for mobile robots
Virtual-to-real Deep Reinforcement Learning: Continuous Control of Mobile Robots for Mapless Navigation
Autonomous Navigation of UAVs in Large-Scale Complex Environments: A Deep Reinforcement Learning Approach
Deep-Reinforcement-Learning-Based Autonomous UAV Navigation With Sparse Rewards
Multi-agent actor-critic for mixed cooperative-competitive environments
Motion Planning Among Dynamic, Decision-Making Agents with Deep Reinforcement Learning
Multi-Agent Motion Planning for Dense and Dynamic Environments via Deep Reinforcement Learning
Towards Optimally Decentralized Multi-Robot Collision Avoidance via Deep Reinforcement Learning
Towards Optimally Decentralized Multi-Robot Collision Avoidance via Deep Reinforcement Learnin
RACE: Reinforced Cooperative Autonomous Vehicle Collision Avoidance
Long-Range Indoor Navigation With PRM-RL
A Two-Stage Reinforcement Learning Approach for Multi-UAV Collision Avoidance Under Imperfect Sensing
PRIMAL: Pathfinding via Reinforcement and Imitation Multi-Agent Learning
Scaling Up Multi-agent Reinforcement Learning for Robotic Systems: Learn an Adaptive Sparse Communication Graph
Graph Neural Networks for Decentralized Multi-Robot Path Planning
From Perception to Decision: A Data-driven Approach to End-to-end Motion Planning for Autonomous Ground Robots
Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures
Graph Policy Gradients for Large Scale Unlabeled Motion Planning with Constraints
GLAS: Global-to-Local Safe Autonomy Synthesis for Multi-Robot Motion Planning with End-to-End Learning