【PyTorch学习笔记】8.对抗生成网络
文章目录
- 52.GAN简介
- 53.画家的成长历程
- 54.纳什均衡
-
- 54.1纳什均衡-D
- 54.2纳什均衡-G
- 55.JS散度的弊端
- 56.EM距离
- 57.WGAN与WGAN-GP
- 58.实战
-
- 58.1GAN
- 58.2WGAN
根据龙良曲Pytorch学习视频整理,视频链接:
【计算机-AI】PyTorch学这个就够了!
(好课推荐)深度学习与PyTorch入门实战——主讲人龙良曲
52.GAN简介
生成式对抗网络(Generative Adversarial Nets)是一种无监督深度学习模型,通过生成模型(Gererative Model)和判别模型(Discriminative Model)的互相博弈学习产生相当好的输出。一般捕获数据分布的G和估计样本来自训练数据概率的D都是深度神经网络。判别模型需要输入变量,通过某种模型来预测。生成模型是给定某种隐含信息,来随机产生观测数据。
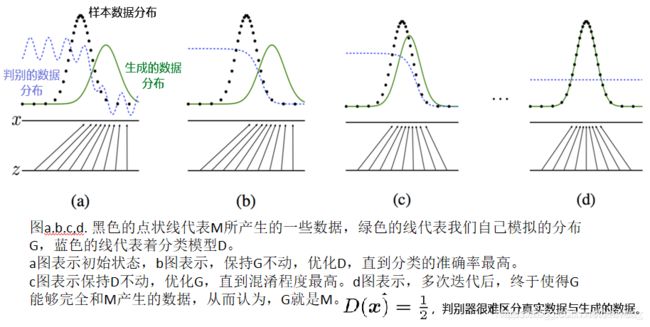
53.画家的成长历程
GAN 主要包括了两个部分,即生成器G (generator)与判别器D (discriminator)
- G通过接收一个随机噪声z生成图片,记作G(z)。G主要用来学习真实图像分布从而让自身生成的图像更加真实,以骗过判别器
- D的输入参数是x,输出D(x)代表x为真实图片的概率。判别器则需要对接收的图片进行真假判别
对于给定的真实图片(real image),判别器要为其打上标签 真1;对于给定的生成图片(fake image),判别器要为其打上标签 假0;对于生成器传给辨别器的生成图片,生成器希望辨别器打上标签 1。随着时间推移,生成器和判别器不断地进行对抗,最终两个网络达到了一个动态均衡:生成器生成的图像接近于真实图像分布,而判别器识别不出真假图像,对于给定图像的预测为真的概率基本接近 0.5(相当于随机猜测类别),即 D ( G ( z ) ) = 0.5 D(G(z))=0.5 D(G(z))=0.5。
损失函数
m i n G m a x L ( D , G ) = E x ∼ p r ( x ) [ l o g D ( x ) ] + E z ∼ p z ( z ) [ l o g ( 1 − D ( G ( z ) ) ) ] min_G\space max_L(D,G)=E_{x\sim p_r(x)}[logD(x)]+E_{z\sim p_z(z)}[log(1-D(G(z)))] minG maxL(D,G)=Ex∼pr(x)[logD(x)]+Ez∼pz(z)[log(1−D(G(z)))]
= E x ∼ p r ( x ) [ l o g D ( x ) ] + E x ∼ p g ( x ) [ l o g ( 1 − D ( x ) ) ] =E_{x\sim p_r(x)}[logD(x)]+E_{x\sim p_g(x)}[log(1-D(x))] =Ex∼pr(x)[logD(x)]+Ex∼pg(x)[log(1−D(x))]
54.纳什均衡
首先介绍一下KL散度、JS散度和交叉熵。三者都是用来衡量两个概率分布之间的差异性的指标。
KL散度(Kullback–Leibler Divergence):又称KL距离,相对熵。当概率分布P(x)和Q(x)的相似度越高,KL散度越小。KL散度主要有两个性质:
- 不对称性:尽管KL散度从直观上是个度量或距离函数,但它并不是一个真正的度量或者距离,因为它不具有对称性,即 D ( P ∣ ∣ Q ) ≠ D ( Q ∣ ∣ P ) D(P||Q)\neq D(Q||P) D(P∣∣Q)=D(Q∣∣P)
- 非负性:相对熵的值是非负值,即 D ( P ∣ ∣ Q ) > 0 D(P||Q)>0 D(P∣∣Q)>0
D K L ( p ∣ ∣ q ) = ∫ x p ( x ) l o g p ( x ) q ( x ) d x D_{KL}(p||q)=\int _xp(x)log\frac{p(x)}{q(x)}dx DKL(p∣∣q)=∫xp(x)logq(x)p(x)dx
JS散度(Jensen-Shannon Divergence):又称JS距离,是KL散度的一种变形。不同于KL主要有两方面:
- 值域范围:JS散度的值域范围是[0,1],相同则是0,相反为1。相较于KL,对相似度的判别更确切了
- 对称性:即 J S ( P ∣ ∣ Q ) = J S ( Q ∣ ∣ P ) JS(P||Q)=JS(Q||P) JS(P∣∣Q)=JS(Q∣∣P)
D J S ( p ∣ ∣ q ) = 1 2 D K L ( p ∣ ∣ p + q 2 + 1 2 D K L ( q ∣ ∣ p + q 2 ) D_{JS}(p||q)=\frac{1}{2}D_{KL}(p||\frac{p+q}{2}+\frac{1}{2}D_{KL}(q||\frac{p+q}{2}) DJS(p∣∣q)=21DKL(p∣∣2p+q+21DKL(q∣∣2p+q)

交叉熵(Cross Entropy):在神经网络中交叉熵可作为损失函数,因为它可以衡量P和Q的相似性 H ( P , Q ) = ∑ P ( x ) l o g 1 Q ( x ) H(P,Q)=\sum P(x)log\frac{1}{Q(x)} H(P,Q)=∑P(x)logQ(x)1
交叉熵和相对熵的关系: D ( P ∣ ∣ Q ) = H ( P , Q ) − H ( P ) D(P||Q)=H(P,Q)-H(P) D(P∣∣Q)=H(P,Q)−H(P)
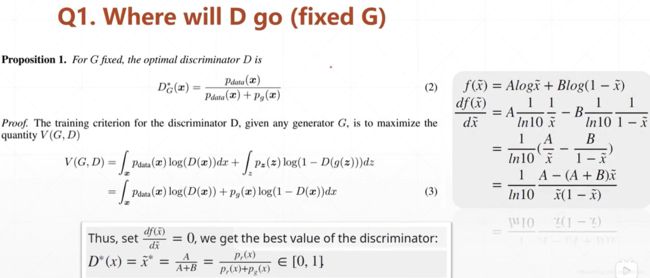
54.1纳什均衡-D
Q1. Where will D converge, given fixed G?
54.2纳什均衡-G
Q2, Where will G converge, after optimal D?
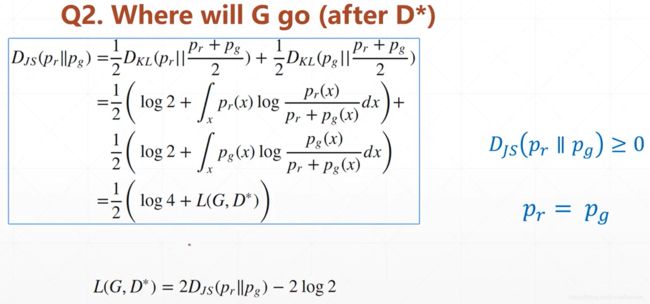
训练最好的情况时 p r = p g p_r=p_g pr=pg,此时 L ( G , D ∗ ) = 2 l o g 2 L(G,D^*)=2log2 L(G,D∗)=2log2
55.JS散度的弊端
通常GAN在训练的时候会出现不稳定,因为在大多数情况, P G P_G PG和 P d a t a P_{data} Pdata是不重叠的(overlapped):
- The nature of data:Both P G P_G PG and P d a t a P_{data} Pdata are low-dimanifold in high-dim space. The overlap can be ignored.
- Sampling:Even though P G P_G PG and P d a t a P_{data} Pdata have overlap. If you do not have enough sampling…
如果 P G P_G PG和 P d a t a P_{data} Pdata不重叠, D K L = + ∞ D_{KL}=+\infty DKL=+∞, D J S = l o g 2 D_{JS}=log2 DJS=log2


Gradient Vanishing
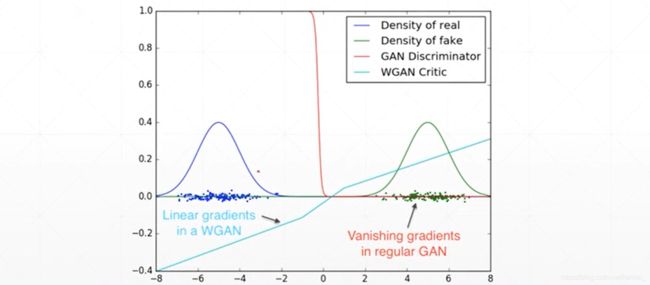
Traing Progress Invisible
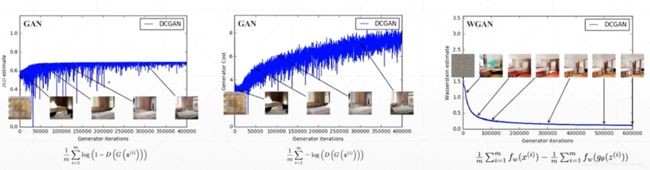
56.EM距离
WGAN可以解决以上问题,其引入了EM距离
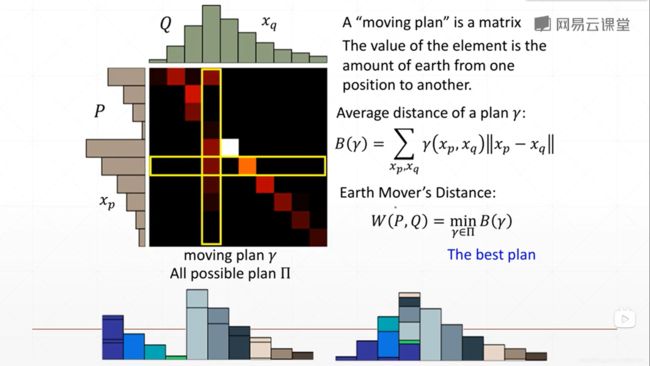
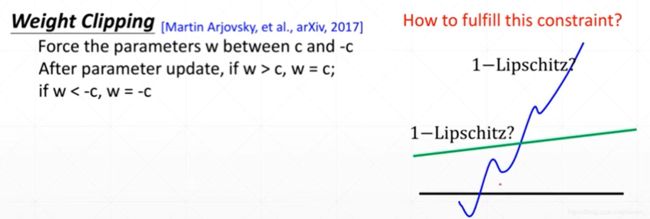
How to compute Wasserstein Distance?
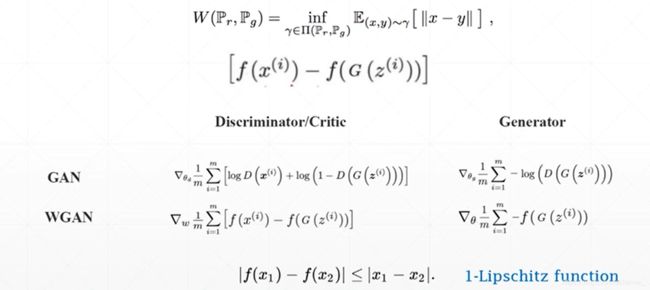
离散情况下Wasserstein Distance可以很好解决overlapped问题,连续情况如果f函数满足1-Lipschitz function,Discriminator就能模拟Wasserstein Distance,训练就会稳定。Weight Clipping是实现1-Lipschitz function的一种方式:
57.WGAN与WGAN-GP
WGAN-GP可以很好解决1-Lipschitz function问题

事实证明WGAN-GP可以训练更稳定,虽然DCGAN的训练结果更好,但是DCGAN需要精心设计网络和参数等,相较来说WGAN-GP是最佳选择
58.实战
58.1GAN
import torch
from torch import nn, optim, autograd
import numpy as np
import visdom
import random
import matplotlib.pyplot as plt
h_dim = 400
batchsz = 512
viz = visdom.Visdom()
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
self.net = nn.Sequential(
# z:[b, 2] => [b, 2]
nn.Linear(2, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, 2),
)
def forward(self, z):
output = self.net(z)
return output
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
self.net = nn.Sequential(
nn.Linear(2, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, 1),
nn.Sigmoid()
)
def forward(self, x):
output = self.net(x)
return output.view(-1)
def data_generator():
"""
8-gaussian mixture models
:return:
"""
scale = 2
centers = [
(1, 0),
(-1, 0),
(0, 1),
(0, -1),
(1. / np.sqrt(2), 1. / np.sqrt(2)),
(1. / np.sqrt(2), -1. / np.sqrt(2)),
(-1. / np.sqrt(2), 1. / np.sqrt(2)),
(-1. / np.sqrt(2), -1. / np.sqrt(2))
]
centers = [(scale * x, scale * y) for x, y in centers]
while True:
dataset = []
for i in range(batchsz):
point = np.random.randn(2) * 0.02
center = random.choice(centers)
# N(0, 1) + center x1/x2
point[0] += center[0]
point[1] += center[1]
dataset.append(point)
dataset = np.array(dataset).astype(np.float32)
dataset /= 1.414
yield dataset
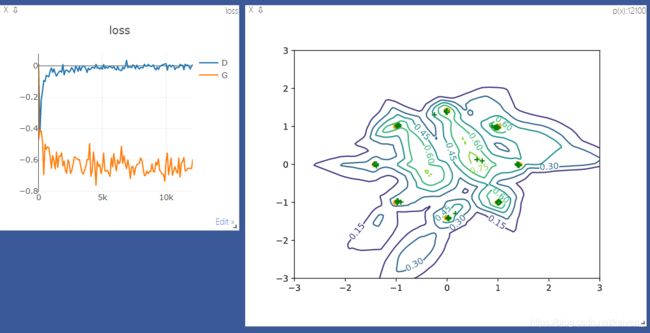
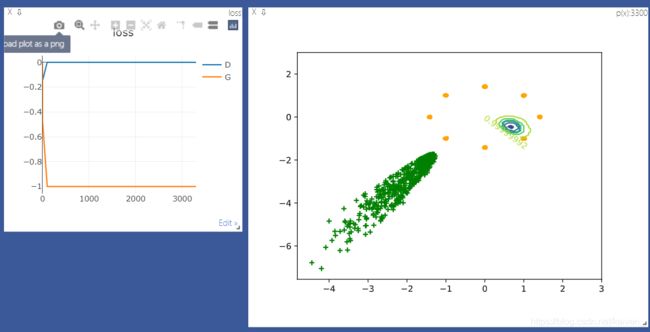
def generate_image(D, G, xr, epoch):
"""
Generates and saves a plot of the true distribution, the generator, and the critic
:param D:
:param G:
:param xr:
:param epoch:
:return:
"""
N_POINTS = 128
RANGE = 3
plt.clf() # 清除当前 figure 的所有axes,但是不关闭这个 window,所以能继续复用于其他的 plot。
points = np.zeros((N_POINTS, N_POINTS, 2), dtype='float32')
points[:, :, 0] = np.linspace(-RANGE, RANGE, N_POINTS)[:, None]
points[:, :, 1] = np.linspace(-RANGE, RANGE, N_POINTS)[None, :]
print('p:', points.shape) # p: (128, 128, 2)
points = points.reshape((-1, 2))
print('p:', points.shape) # # (16384, 2)
# draw contour
with torch.no_grad():
points = torch.Tensor(points).cuda() # [16384, 2]
disc_map = D(points).cpu().numpy() # [16384, ]
x = y = np.linspace(-RANGE, RANGE, N_POINTS)
cs = plt.contour(x, y, disc_map.reshape((len(x), len(y))).transpose())
plt.clabel(cs, inline=1, fontsize=10)
# draw samples
with torch.no_grad():
z = torch.randn(batchsz, 2).cuda() # [b, 2]
samples = G(z).cpu().numpy() # [b, 2]
plt.scatter(xr[:, 0], xr[:, 1], c='orange', marker='.')
plt.scatter(samples[:, 0], samples[:, 1], c='green', marker='+')
viz.matplot(plt, win='contour', opts=dict(title='p(x):%d'%epoch))
def main():
torch.manual_seed(23)
np.random.seed(23)
data_iter = data_generator()
x = next(data_iter)
# [b, 2]
# print(x.shape) # (512, 2)
G = Generator().cuda()
D = Discriminator().cuda()
# print(G)
# print(D)
optim_G = optim.Adam(G.parameters(), lr=5e-4, betas=(0.5, 0.9))
optim_D = optim.Adam(D.parameters(), lr=5e-4, betas=(0.5, 0.9))
viz.line([[0, 0]], [0], win='loss', opts=dict(title='loss', legend=['D', 'G']))
for epoch in range(50000):
# 1. train Discrimator firstly
for _ in range(5):
# 1.1 train on real data
xr = next(data_iter)
xr = torch.from_numpy(xr).cuda()
# [b, 2] => [b, 1]
predr = D(xr)
# max predr
lossr = -predr.mean()
# 1.2 train on fake data
# [b, ]
z = torch.randn(batchsz, 2).cuda()
xf = G(z).detach() # tf.stop_gradient()
predf = D(xf)
lossf = predf.mean()
# aggregate all
loss_D = lossr + lossf
# optimize
optim_D.zero_grad()
loss_D.backward()
optim_D.step()
# 2. train Generator
z = torch.randn(batchsz, 2).cuda()
xf = G(z)
predf = D(xf)
# max gredf.mean()
loss_G = -predf.mean()
# optimize
optim_G.zero_grad()
loss_G.backward()
optim_G.step()
if epoch % 100 == 0:
viz.line([[loss_D.item(), loss_G.item()]], [epoch], win='loss', update='append')
print(loss_D.item(), loss_G.item())
generate_image(D, G, xr.cpu(), epoch)
if __name__ == '__main__':
main()
58.2WGAN
def gradient_penalty(D, xr, xf):
"""
:param D:
:param xr: [b, 2]
:param xf: [b, 2]
:return:
"""
# [b, 1]
t = torch.rand(batchsz, 1).cuda()
# [b, 1] => [b, 2]
t = t.expand_as(xr)
# interpolation
mid = t * xr + (1 - t) * xf
# set it requires gradient
mid.requires_grad_()
pred = D(mid)
grads = autograd.grad(outputs=pred, inputs=mid,
grad_outputs=torch.ones_like(pred),
create_graph=True, retain_graph=True, only_inputs=True)[0]
gp = torch.pow(grads.norm(2, dim=1) - 1, 2).mean()
return gp
...
# 1.3 gradient penalty
gp = gradient_penalty(D, xr, xf.detach())
# aggregate all
loss_D = lossr + lossf + 0.2*gp