摄像头标定(carlibration)、Homography以及它的matlab实现
- Homogeneous Coordinates
- Pin-hole camera Model
- Standard Perspective Camera Model
- affine camera model
- 计算标定矩阵
- 总结
- homography
- Matlab实现图片拼接
- 计算H
- 把你的照片嵌入海报
- 图片拼接
转载请注明:http://blog.csdn.net/c602273091/article/details/54572428
Homogeneous Coordinates

点的二维坐标可以用三维表示,因为用二维怎么表示无穷,用无穷符号么?显然不够理想。当w=0的时候,就在无穷远点。
2D的直线表示:

Pin-hole camera Model



在小孔模型的基础上,我们进一步得到摄像头的透视模型。
Standard Perspective Camera Model

从真实世界的点投影到图片2D的过程。
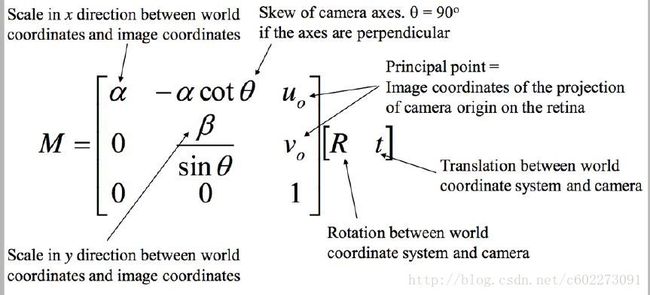
这个矩阵左边的就叫做内参,右边的就是外参。
这里需要注意的是有一些基本的变换要记住:

以上的M矩阵可以有多种写法:

使用投影矩阵把3D的点投影到2D中:


当分子为0的时候,那么这时候这个公式表示方向为 a1 的平面,感觉这个东西和ORB-SLAM描述的点云的方向一样。
它们描述的平面如下图:

给定一个图片上的平面的点,怎么计算它真实的3D点的拍摄方向以及怎么计算摄像头的中心呢?
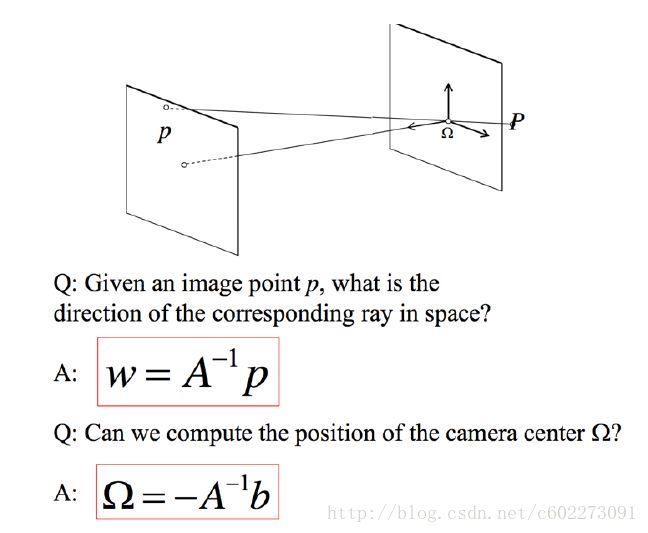
现在我才知道Gary讲的东西真是很有用。
affine camera model
如果M矩阵最后一行是[0 0 0 1],那么这就是一个仿射相机,并且真实世界与图片只是线性变化。比如weak Perspective。

计算标定矩阵
可以发现,这里是认为已知真实世界坐标和图片坐标的对应关系。



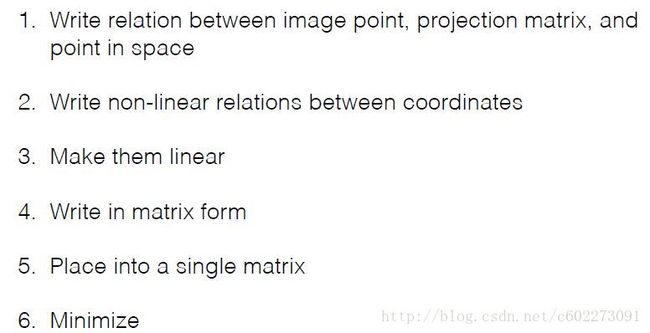
总结
对整个标定做一个总结:


对于优化部分不理解的话可以看我代码的实现,里面讲得更加清楚些。
homography
如果你对上面的标定已经了解了的话,对于H矩阵应该更容易理解。H这个指的在低视角(两幅图片之间拍摄角度)、近似平面或平面(这样就是线性变换)情况下,拍摄的图片之间可以进行转换。
比如p1和p2分别是两幅图片上的点,对应同一个3D坐标。那么在满足低视角、近乎平面的时候就有:(看我的第一次CV作业的理论部分)


当进行纯粹旋转的时候证明它是Homography?


怎么计算H矩阵?最少需要多少个对应点呢?



Matlab实现图片拼接
计算H
把上面的式子写出来计算它的H,代码如下:
这里要记住matlab是列存储的。
% YU CHEN
% Q 4.1
% 2016
% CMU ECE
function H2to1 = computeH(p1, p2)
N = size(p1, 2); % the number of points
A = zeros(2*N, 9); % set A to the required size
p1 = p1';
p2 = p2';
for i = 1 : N
j = bitshift(i, 1);
A(j - 1,:) = [p2(i,:), 1, zeros(1,3), -p1(i,1)*[p2(i,:), 1]];
A(j, :) = [zeros(1,3), p2(i,:), 1, -p1(i,2)*[p2(i,:), 1]];
end
ATA = A'* A;
[EigVector, EigValue] = eig(ATA);
EigV = diag(EigValue); % get eign value from symmetry line.
[~,pos] = min(EigV); % get the minimal value position.
H = EigVector(:, pos); % get the vectoe with smallest eign value.
H2to1 = reshape(H,3,3)';把你的照片嵌入海报

实现代码如下:如果你看我的代码会发现我的代码用了很多matlab技巧做加速,而且基本看不到for循环。
function q42checker
img_PNCpark = imread('pnc.jpg');
img_yourname = imread('pnc_tomap.jpg');
A = load('Q4.2.p1p2.mat');
[img_yourname_warped, img_PNCpark_yourname]=warp2PNCpark(img_PNCpark, img_yourname, A.p1, A.p2);
A.p1 = A.p1';
A.p2 = A.p2';
colors = ['r+'; 'b+'; 'g+'; 'm+'; 'c+'; 'k+'; 'w+'; 'y+'];
subaxis(2,2,1, 'Spacing', 0.03, 'Padding', 0, 'Margin', 0);
imshow(img_PNCpark);
hold on;
for u=1:size(A.p1, 1)
plot(A.p1(u, 1), A.p1(u, 2), colors(mod(u-1,size(colors,1))+1, :), 'MarkerSize', 24, 'LineWidth', 6);
end
subaxis(2,2,2, 'Spacing', 0.03, 'Padding', 0, 'Margin', 0);
imshow(img_yourname);
hold on;
for u=1:size(A.p2, 1)
plot(A.p2(u, 1), A.p2(u, 2), colors(mod(u-1,size(colors,1))+1, :), 'MarkerSize', 24, 'LineWidth', 6);
end
subaxis(2,2,3, 'Spacing', 0.03, 'Padding', 0, 'Margin', 0);
imshow(img_yourname_warped);
subaxis(2,2,4, 'Spacing', 0.03, 'Padding', 0, 'Margin', 0);
imshow(img_PNCpark_yourname);
end% YU CHEN
% Q 4.3
% 2016
function [img_YuChen_warped, img_PNCpark_yourname] = warp2PNCpark(img_PNCpark, img_YuChen, p1, p2)
H = computeH(p1, p2);
% get warped name
img_YuChen_warped = warpH(img_YuChen, H, size(img_PNCpark), 0);
% combine warped image with mine
R0 = ~img_YuChen_warped(:,:,1)>0;
G0 = ~img_YuChen_warped(:,:,2)>0;
B0 = ~img_YuChen_warped(:,:,3)>0;
R0 = uint8(R0);
G0 = uint8(G0);
B0 = uint8(B0);
img_PNCpark_yourname = img_PNCpark;
img_PNCpark_yourname(:,:,1) = img_PNCpark(:,:,1).*R0;
img_PNCpark_yourname(:,:,2) = img_PNCpark(:,:,2).*G0;
img_PNCpark_yourname(:,:,3) = img_PNCpark(:,:,3).*B0;
img_PNCpark_yourname = img_PNCpark_yourname + img_YuChen_warped;% Draw lines between corresponding points in two image
% img1, img2, two images of equal size
% pts - a 4xN matrix of points, where pts(1:2,:) are the points in image
% 1 and pts(3:4,:) are points in image 2.
function [] = plotMatches(img1,img2, pts)
if (size(img1) ~= size(img2))
fprintf('Images must be the same size.\n');
return
end
img = [img1 img2];
imshow(img);
axis equal;
lx = [pts(1,:); pts(3,:)+size(img1,2)];
ly = [pts(2,:); pts(4,:)];
perm = randperm(size(pts,2)) ;
sel = perm(1:100) ;
line(lx(:,sel),ly(:,sel),'Color','g');
end% YU CHEN
% Q 4.2
% 2016
%clc;
%clear all;
img1 = imread('pnc.jpg');
img2 = imread('pnc_tomap.jpg');
[points1,points2] = cpselect(img1,img2);
% use cpselect to save 2 sets of point pairs
% ... move to p1 and p2 as required
p1 = p1';
p2 = p2';
save('Q4.2.p1p2.mat', 'p1', 'p2'); % save it图片拼接
第一种:把图二变换到图一的位置
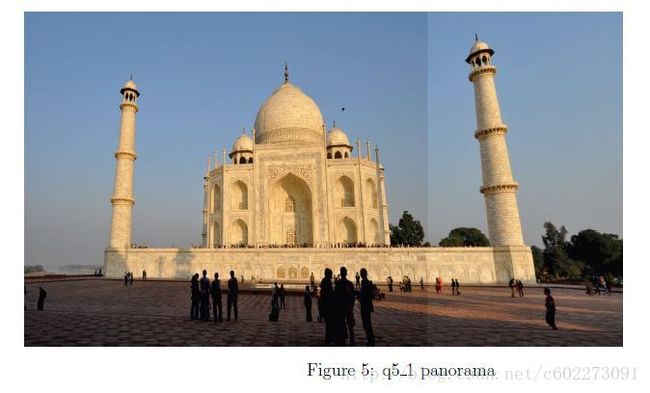
function [H2to1_q51,warped_q51,panoImg_q51]= q5_1(im1,im2,pts)
H2to1_q51 = computeH(pts(1:2,:), pts(3:4,:));
% save H2to1
save('q5_1.mat', 'H2to1_q51'); % save it
w = size(pts, 2);
thirdCol = ones(w, 1);
pt1 = [(pts(1:2,:))', thirdCol];
pt2 = [(pts(3:4,:))', thirdCol];
% save warped feature points
taj2totaj1warpedFeature = H2to1_q51*pt2';
% normalization, very important
for i = 1:w
taj2totaj1warpedFeature(:,i) = taj2totaj1warpedFeature(:,i)./taj2totaj1warpedFeature(3,i);
end
save('q5_1_warpedFeatures.mat', 'taj2totaj1warpedFeature');
% calculate RMSE
diff = pts(1:2,:)-taj2totaj1warpedFeature(1:2,:);
numP = size(diff, 2);
RMSE = sqrt(sum(diff(1,:).^2 + diff(2,:).^2)/numP);
disp('The ROOT MEAN SQUARE ERROR BETWEEN CORRESPONDING POINTS is');
format short g;
RMSE
outSize = [size(im1,1), 3000];
img2Size = size(im2);
Img2Map = zeros(img2Size(1:2));
%round((pts(3:4,:))')
Img2Map(round((pts(4,:))'), round((pts(3,:))')) = 1;
Img2Map = uint8(Img2Map);
%size(im2(:,:,1))
%im2(:,:,1) = im2(:,:,1).*Img2Map;
%im2(:,:,2) = im2(:,:,2).*Img2Map;
%im2(:,:,3) = im2(:,:,3).*Img2Map;
% get warped image
warped_q51 = warpH(im2, H2to1_q51, outSize, 0);
imwrite(warped_q51,'q5_1.jpg','jpg');
imshow( warped_q51);
% produce panorama
panoImg_q51 = warped_q51;
row1 = 1;
col1 = 2;
%panoImg_q51(round((pts(row1,:))'), round((pts(col1,:))'), 1) = im1(round((pts(row1,:))'), round((pts(col1,:))'), 1);
%panoImg_q51(round((pts(row1,:))'), round((pts(col1,:))'), 2) = im1(round((pts(row1,:))'), round((pts(col1,:))'), 2);
%panoImg_q51(round((pts(row1,:))'), round((pts(col1,:))'), 3) = im1(round((pts(row1,:))'), round((pts(col1,:))'), 3);
img1Size = size(im1);
%[X, Y] = meshgrid(1:img1Size(2), 1:img1Size(1));
%lengthIm = img1Size(1)*img1Size(2);
%X = reshape(X, lengthIm, 1);
%Y = reshape(Y, lengthIm, 1);
%m1Index = [Y, X];
%m1IndexRow = m1Index(:,row1);
%m1IndexCol = m1Index(:,col1);
%panoImg_q51(m1IndexRow, m1IndexCol, 1) = im1(m1IndexRow, m1IndexCol, 1);
%panoImg_q51(m1IndexRow, m1IndexCol, 2) = im1(m1IndexRow, m1IndexCol, 2);
%panoImg_q51(m1IndexRow, m1IndexCol, 3) = im1(m1IndexRow, m1IndexCol, 3);
panoImg_q51(1:img1Size(1), 1:img1Size(2), 1) = im1(1:img1Size(1), 1:img1Size(2), 1);
panoImg_q51(1:img1Size(1), 1:img1Size(2), 2) = im1(1:img1Size(1), 1:img1Size(2), 2);
panoImg_q51(1:img1Size(1), 1:img1Size(2), 3) = im1(1:img1Size(1), 1:img1Size(2), 3);
imshow(panoImg_q51);
imwrite(panoImg_q51,'q5_1_pan.jpg','jpg');
end
第二种:两幅图片同时变换
function [H2to1, panoImg_q51] = q5_2(img1, img2, pts)
% calculate H
H2to1 = computeH(pts(1:2,:), pts(3:4,:));
% four corners
c1 = [0,size(img1, 2), size(img1, 2),0; 0,0,size(img1, 1),size(img1, 1); 1,1,1,1];
c2 = [0,size(img2, 2), size(img2, 2),0; 0,0,size(img2, 1),size(img2, 1); 1,1,1,1];
% warp corners
c1_warped = c1;
c2_warped = H2to1*c2;
% normalize to 1
for i = 1:4
c2_warped(:,i) = c2_warped(:,i)./c2_warped(3,i);
end
c1_warped = round(c1_warped);
c2_warped = round(c2_warped);
maxY = max([c1_warped(2,:),c2_warped(2,:)]);
minY = min([c1_warped(2,:),c2_warped(2,:)]);
maxX = max([c1_warped(1,:),c2_warped(1,:)]);
minX = min([c1_warped(1,:),c2_warped(1,:)]);
% calculate the four corners after transformation
out_size = [maxY - minY, maxX - minX];
% calculate scalar
s = 1280/out_size(2);
M = [s, 0, -s*minX; 0, s, -s*minY; 0, 0, 1];
out_size = round(s*out_size);
% warp img1 and img2
warp_im1=warpH(img1, M, out_size, 0);
warp_im2=warpH(img2, M*H2to1, out_size, 0);
% calculate overlapped area and set to 0
R2 = uint8(~warp_im2(:,:,1)>0);
G2 = uint8(~warp_im2(:,:,2)>0);
B2 = uint8(~warp_im2(:,:,3)>0);
panoImg_q51 = warp_im1;
panoImg_q51(:,:,1) = warp_im1(:,:,1).*R2;
panoImg_q51(:,:,2) = warp_im1(:,:,2).*G2;
panoImg_q51(:,:,3) = warp_im1(:,:,3).*B2;
% combine two warped images
panoImg_q51 = panoImg_q51 + warp_im2;
imwrite(panoImg_q51,'q5_2_pan.jpg','jpg');
end我做的这个完整的代码不就会放在Github上
点击这里
希望可以给作者一颗心,鼓励作者继续前进~
PS:以上ppt截图来自于CMU ECE的Gary老师。