Pytorch 实现DenseNet网络
DenseNet的特性:
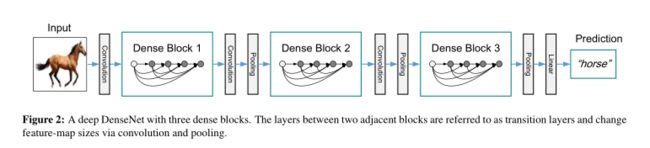
(1)神经网络一般需要使用池化操作缩小特征图尺寸来提取语义特征。而Dense Block需要保持每一个Block内的特征图尺寸一致来进行Concatnate操作,因此Dense Block被分成多个Block。Block的数量一般为4.
(2)两个相邻的Dense Block之间的部分被称为Transition层,具体包括BN,ReLU、1x1卷积、2x2平均池化操作。1x1的作用是降维,起到压缩模型的作用,而平均池化则是降低特征图的尺寸。
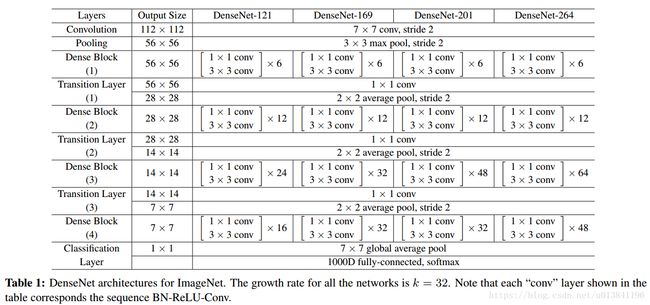
DenseNet的结构图:
网络四个优点
- 减轻梯度消失
- 提高了特征的传播效率
- 提高了特征的利用效率
- 减小了网络的参数量
Pytorch实现:
import torch
from torch import nn
import torch.nn.functional as F
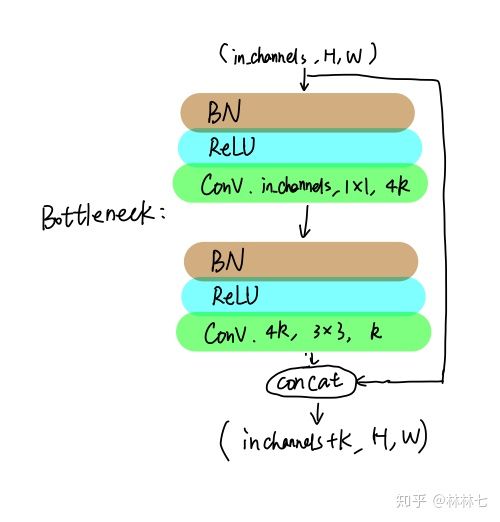
#实现一个Bottleneck的类,初始化需要输入通道数与GrowthRate这两个参数
class Bottleneck(nn.Module):
def __init__(self,nChannels,growthRate):
super(Bottleneck,self).__init__()
#通常1x1卷积的通道数为GrowthRate的4倍
interChannels=4*growthRate
self.bn1=nn.BatchNorm2d(nChannels)
self.conv1=nn.Conv2d(nChannels,interChannels,kernel_size=1,bias=False)
self.bn2=nn.BatchNorm2d(interChannels)
self.conv2=nn.Conv2d(interChannels,growthRate,kernel_size=3,padding=1,bias=False)
def forward(self,x):
out=self.conv1(F.relu(self.bn1(x)))
out=self.conv2(F.relu(self.bn2(out)))
#将输入x同计算的结果out进行通道拼接
out=torch.cat((x,out),1)
return out
class Denseblock(nn.Module):
def __init__(self,nChannels,growthRate,nDenseBlocks):
super(Denseblock,self).__init__()
layers=[]
#将每一个Bottleneck利用nn.Sequential()整合起来,输入通道数需要线性增长
for i in range(int(nDenseBlocks)):
layers.append(Bottleneck(nChannels,growthRate))
nChannels+=growthRate
self.denseblock=nn.Sequential(*layers)
def forward(self,x):
return self.denseblock(x)module=Denseblock(64,32,6).cuda()
module结构:
Denseblock(
(denseblock): Sequential(
(0): Bottleneck(
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv1): Conv2d(64, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(1): Bottleneck(
(bn1): BatchNorm2d(96, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv1): Conv2d(96, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(2): Bottleneck(
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv1): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(3): Bottleneck(
(bn1): BatchNorm2d(160, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv1): Conv2d(160, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(4): Bottleneck(
(bn1): BatchNorm2d(192, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv1): Conv2d(192, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
(5): Bottleneck(
(bn1): BatchNorm2d(224, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv1): Conv2d(224, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
)
)
)