自动驾驶 PointNet++ 点云处理原理与代码实战 1(代码部分)
文章目录
- PointNet 模型代码详解
- PointNet++ 点云处理任务的代码
-
- PointNet++ 物体形状分类代码
- PointNet++ 部件分割代码
- PointNet++ 语义分割代码
- PointNet++ Util工具函数代码
-
- Farthest Point Sample 最远点采样
- Ball Query 球查询
- Sample and Group
- Set Abstraction
- 分割中的 Feature Prepogation
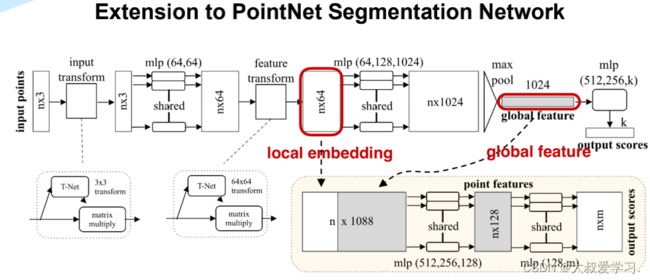
PointNet 模型代码详解
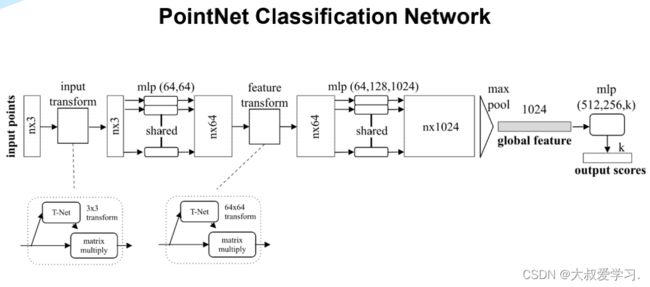
整个模型概览图
下面分部分的代码:
import torch.utils.data
from torch.autograd import Variable
import numpy as np
import torch.nn.functional as F
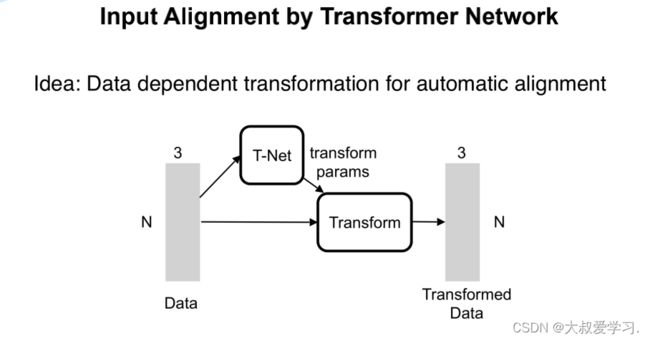
# STN3d: T-Net 3*3 transform
# 类似一个mini-PointNet
class STN3d(nn.Module):
def __init__(self, channel):
super(STN3d, self).__init__()
# torch.nn.Conv1d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
self.conv1 = torch.nn.Conv1d(channel, 64, 1)
self.conv2 = torch.nn.Conv1d(64, 128, 1)
self.conv3 = torch.nn.Conv1d(128, 1024, 1)
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, 9) # 9=3*3
self.relu = nn.ReLU()
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
self.bn4 = nn.BatchNorm1d(512)
self.bn5 = nn.BatchNorm1d(256)
def forward(self, x):
batchsize = x.size()[0]
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
# Symmetric function: max pooling
x = torch.max(x, 2, keepdim=True)[0]
# x参数展平(拉直)
x = x.view(-1, 1024)
x = F.relu(self.bn4(self.fc1(x)))
x = F.relu(self.bn5(self.fc2(x)))
x = self.fc3(x)
# 展平的对角矩阵:np.array([1, 0, 0, 0, 1, 0, 0, 0, 1])
iden = Variable(torch.from_numpy(np.array([1, 0, 0, 0, 1, 0, 0, 0, 1]).astype(np.float32))).view(1, 9).repeat(
batchsize, 1)
if x.is_cuda:
iden = iden.cuda()
x = x + iden # affine transformation
# 用view,转换成batchsize*3*3的数组
x = x.view(-1, 3, 3)
return x
# STNkd: T-Net 64*64 transform,k默认是64
class STNkd(nn.Module):
def __init__(self, k=64):
super(STNkd, self).__init__()
self.conv1 = torch.nn.Conv1d(k, 64, 1)
self.conv2 = torch.nn.Conv1d(64, 128, 1)
self.conv3 = torch.nn.Conv1d(128, 1024, 1)
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, k * k)
self.relu = nn.ReLU()
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
self.bn4 = nn.BatchNorm1d(512)
self.bn5 = nn.BatchNorm1d(256)
self.k = k
def forward(self, x):
batchsize = x.size()[0]
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
# Symmetric function: max pooling
x = torch.max(x, 2, keepdim=True)[0]
# 参数拉直(展平)
x = x.view(-1, 1024)
x = F.relu(self.bn4(self.fc1(x)))
x = F.relu(self.bn5(self.fc2(x)))
x = self.fc3(x)
# 展平的对角矩阵
iden = Variable(torch.from_numpy(np.eye(self.k).flatten().astype(np.float32))).view(1, self.k * self.k).repeat(
batchsize, 1)
if x.is_cuda:
iden = iden.cuda()
x = x + iden # affine transformation
x = x.view(-1, self.k, self.k)
return x

# PointNet编码器
class PointNetEncoder(nn.Module):
def __init__(self, global_feat=True, feature_transform=False, channel=3):
super(PointNetEncoder, self).__init__()
self.stn = STN3d(channel) # STN3d: T-Net 3*3 transform
self.conv1 = torch.nn.Conv1d(channel, 64, 1)
self.conv2 = torch.nn.Conv1d(64, 128, 1)
self.conv3 = torch.nn.Conv1d(128, 1024, 1)
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
self.global_feat = global_feat
self.feature_transform = feature_transform
if self.feature_transform:
self.fstn = STNkd(k=64) # STNkd: T-Net 64*64 transform
def forward(self, x):
B, D, N = x.size() # batchsize,3(xyz坐标)或6(xyz坐标+法向量),1024(一个物体所取的点的数目)
trans = self.stn(x) # STN3d T-Net
x = x.transpose(2, 1) # 交换一个tensor的两个维度
if D >3 :
x, feature = x.split(3,dim=2)
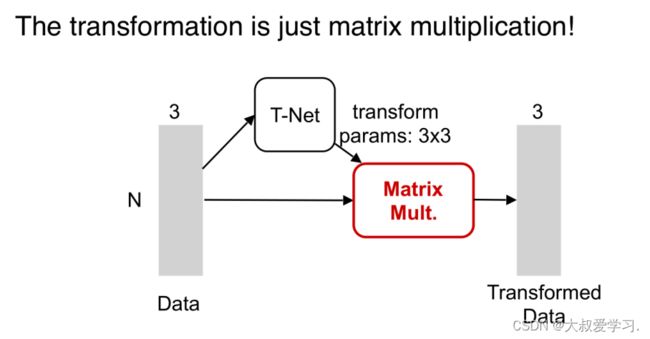
# 对输入的点云进行输入转换(input transform)
# input transform: 计算两个tensor的矩阵乘法
# bmm是两个三维张量相乘, 两个输入tensor维度是(b×n×m)和(b×m×p),
# 第一维b代表batch size,输出为(b×n×p)
x = torch.bmm(x, trans)
if D > 3:
x = torch.cat([x,feature],dim=2)
x = x.transpose(2, 1)
x = F.relu(self.bn1(self.conv1(x))) # MLP
if self.feature_transform:
trans_feat = self.fstn(x) # STNkd T-Net
x = x.transpose(2, 1)
# 对输入的点云进行特征转换(feature transform)
# feature transform: 计算两个tensor的矩阵乘法
x = torch.bmm(x, trans_feat)
x = x.transpose(2, 1)
else:
trans_feat = None
pointfeat = x # 局部特征
x = F.relu(self.bn2(self.conv2(x))) # MLP
x = self.bn3(self.conv3(x)) # MLP
x = torch.max(x, 2, keepdim=True)[0] # 最大池化得到全局特征
x = x.view(-1, 1024) # 展平
if self.global_feat: # 需要返回的是否是全局特征?
return x, trans, trans_feat # 返回全局特征
else:
x = x.view(-1, 1024, 1).repeat(1, 1, N)
# 返回局部特征与全局特征的拼接
return torch.cat([x, pointfeat], 1), trans, trans_feat
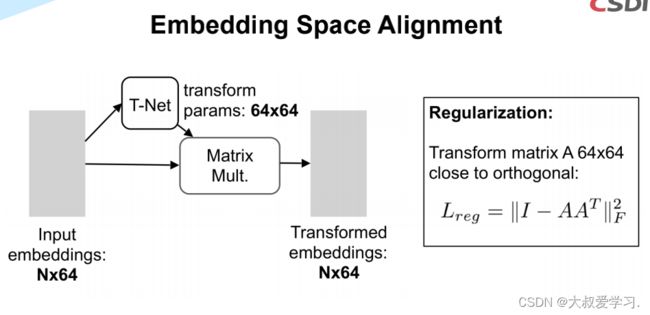
# 对特征转换矩阵做正则化:
# constrain the feature transformation matrix to be close to orthogonal matrix
def feature_transform_reguliarzer(trans):
d = trans.size()[1]
I = torch.eye(d)[None, :, :] # torch.eye(n, m=None, out=None) 返回一个2维张量,对角线位置全1,其它位置全0
if trans.is_cuda:
I = I.cuda()
# 正则化损失函数
loss = torch.mean(torch.norm(torch.bmm(trans, trans.transpose(2, 1) - I), dim=(1, 2)))
return loss
PointNet++ 点云处理任务的代码
PointNet++ 物体形状分类代码
import torch.nn as nn
import torch.utils.data
import torch.nn.functional as F
from pointnet import PointNetEncoder, feature_transform_reguliarzer
class get_model(nn.Module):
def __init__(self, k=40, normal_channel=True):
super(get_model, self).__init__()
if normal_channel:
channel = 6
else:
channel = 3
self.feat = PointNetEncoder(global_feat=True, feature_transform=True, channel=channel)
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, k)
self.dropout = nn.Dropout(p=0.4)
self.bn1 = nn.BatchNorm1d(512)
self.bn2 = nn.BatchNorm1d(256)
self.relu = nn.ReLU()
def forward(self, x):
x, trans, trans_feat = self.feat(x)
x = F.relu(self.bn1(self.fc1(x)))
x = F.relu(self.bn2(self.dropout(self.fc2(x))))
x = self.fc3(x)
x = F.log_softmax(x, dim=1) # 计算对数概率
return x, trans_feat
class get_loss(torch.nn.Module):
def __init__(self, mat_diff_loss_scale=0.001):
super(get_loss, self).__init__()
self.mat_diff_loss_scale = mat_diff_loss_scale
def forward(self, pred, target, trans_feat):
# NLLLoss的输入是一个对数概率向量和一个目标标签. 它不会计算对数概率.
# 适合网络的最后一层是log_softmax.
# 损失函数 nn.CrossEntropyLoss()与NLLLoss()相同, 唯一的不同是它去做softmax.
loss = F.nll_loss(pred, target) # 分类损失
mat_diff_loss = feature_transform_reguliarzer(trans_feat) #特征变换正则化损失
# 总的损失函数
total_loss = loss + mat_diff_loss * self.mat_diff_loss_scale
return total_loss
PointNet++ 部件分割代码
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.utils.data
import torch.nn.functional as F
from pointnet import STN3d, STNkd, feature_transform_reguliarzer
class get_model(nn.Module):
def __init__(self, part_num=50, normal_channel=True):
super(get_model, self).__init__()
if normal_channel: # 是否有法向量信息
channel = 6
else:
channel = 3
self.part_num = part_num # 部件类别数量, ShapeNet中为50
self.stn = STN3d(channel)
self.conv1 = torch.nn.Conv1d(channel, 64, 1)
self.conv2 = torch.nn.Conv1d(64, 128, 1)
self.conv3 = torch.nn.Conv1d(128, 128, 1)
self.conv4 = torch.nn.Conv1d(128, 512, 1)
self.conv5 = torch.nn.Conv1d(512, 2048, 1)
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(128)
self.bn4 = nn.BatchNorm1d(512)
self.bn5 = nn.BatchNorm1d(2048)
self.fstn = STNkd(k=128) # 维度为128
self.convs1 = torch.nn.Conv1d(4944, 256, 1)
self.convs2 = torch.nn.Conv1d(256, 256, 1)
self.convs3 = torch.nn.Conv1d(256, 128, 1)
self.convs4 = torch.nn.Conv1d(128, part_num, 1)
self.bns1 = nn.BatchNorm1d(256)
self.bns2 = nn.BatchNorm1d(256)
self.bns3 = nn.BatchNorm1d(128)
def forward(self, point_cloud, label):
B, D, N = point_cloud.size()
trans = self.stn(point_cloud)
point_cloud = point_cloud.transpose(2, 1)
if D > 3:
point_cloud, feature = point_cloud.split(3, dim=2)
point_cloud = torch.bmm(point_cloud, trans)
if D > 3:
point_cloud = torch.cat([point_cloud, feature], dim=2)
point_cloud = point_cloud.transpose(2, 1)
out1 = F.relu(self.bn1(self.conv1(point_cloud)))
out2 = F.relu(self.bn2(self.conv2(out1)))
out3 = F.relu(self.bn3(self.conv3(out2)))
trans_feat = self.fstn(out3)
x = out3.transpose(2, 1)
net_transformed = torch.bmm(x, trans_feat)
net_transformed = net_transformed.transpose(2, 1)
out4 = F.relu(self.bn4(self.conv4(net_transformed)))
out5 = self.bn5(self.conv5(out4))
out_max = torch.max(out5, 2, keepdim=True)[0] # max后为2048个元素
out_max = out_max.view(-1, 2048)
out_max = torch.cat([out_max,label.squeeze(1)],1)
expand = out_max.view(-1, 2048+16, 1).repeat(1, 1, N) # 16个物体类别
concat = torch.cat([expand, out1, out2, out3, out4, out5], 1) # 局部特征与全局特征拼接
net = F.relu(self.bns1(self.convs1(concat)))
net = F.relu(self.bns2(self.convs2(net)))
net = F.relu(self.bns3(self.convs3(net)))
net = self.convs4(net)
net = net.transpose(2, 1).contiguous()
net = F.log_softmax(net.view(-1, self.part_num), dim=-1)
net = net.view(B, N, self.part_num) # [B, N, 50]
return net, trans_feat
class get_loss(torch.nn.Module):
def __init__(self, mat_diff_loss_scale=0.001):
super(get_loss, self).__init__()
self.mat_diff_loss_scale = mat_diff_loss_scale
def forward(self, pred, target, trans_feat):
loss = F.nll_loss(pred, target)
mat_diff_loss = feature_transform_reguliarzer(trans_feat)
total_loss = loss + mat_diff_loss * self.mat_diff_loss_scale
return total_loss
PointNet++ 语义分割代码
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.utils.data
import torch.nn.functional as F
from pointnet import PointNetEncoder, feature_transform_reguliarzer
class get_model(nn.Module):
def __init__(self, num_class, with_rgb=True):
super(get_model, self).__init__()
if with_rgb:
channel = 6
else:
channel = 3
self.k = num_class # 类别数
self.feat = PointNetEncoder(global_feat=False, feature_transform=True, channel=channel) # 注意:global_feat=False
self.conv1 = torch.nn.Conv1d(1088, 512, 1)
self.conv2 = torch.nn.Conv1d(512, 256, 1)
self.conv3 = torch.nn.Conv1d(256, 128, 1)
self.conv4 = torch.nn.Conv1d(128, self.k, 1)
self.bn1 = nn.BatchNorm1d(512)
self.bn2 = nn.BatchNorm1d(256)
self.bn3 = nn.BatchNorm1d(128)
def forward(self, x):
batchsize = x.size()[0]
n_pts = x.size()[2]
x, trans, trans_feat = self.feat(x)
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
x = self.conv4(x)
x = x.transpose(2,1).contiguous()
x = F.log_softmax(x.view(-1,self.k), dim=-1)
x = x.view(batchsize, n_pts, self.k)
return x, trans_feat
class get_loss(torch.nn.Module):
def __init__(self, mat_diff_loss_scale=0.001):
super(get_loss, self).__init__()
self.mat_diff_loss_scale = mat_diff_loss_scale
def forward(self, pred, target, trans_feat, weight):
loss = F.nll_loss(pred, target, weight = weight)
mat_diff_loss = feature_transform_reguliarzer(trans_feat)
total_loss = loss + mat_diff_loss * self.mat_diff_loss_scale
return total_loss
if __name__ == '__main__':
model = get_model(13, with_rgb=False)
xyz = torch.rand(12, 3, 2048)
(model(xyz))
PointNet++ Util工具函数代码
Farthest Point Sample 最远点采样
import torch
import torch.nn as nn
import torch.nn.functional as F
from time import time
import numpy as np
def timeit(tag, t):
print("{}: {}s".format(tag, time() - t))
return time()
# 归一化点云,使用以centroid为中心的坐标,球半径为1
def pc_normalize(pc):
l = pc.shape[0]
centroid = np.mean(pc, axis=0)
pc = pc - centroid
m = np.max(np.sqrt(np.sum(pc**2, axis=1)))
pc = pc / m
return pc
# square_distance函数用来在ball query过程中确定每一个点距离采样点的距离。
# 函数输入是两组点,N为第一组点src的个数,M为第二组点dst的个数,C为输入点的通道数(如果是xyz时C=3)
# 函数返回的是两组点两两之间的欧几里德距离,即N×M的矩阵。
# 在训练中数据以Mini-Batch的形式输入,所以一个Batch数量的维度为B。
def square_distance(src, dst):
"""
Calculate Euclid distance between each two points.
src^T * dst = xn * xm + yn * ym + zn * zm;
sum(src^2, dim=-1) = xn*xn + yn*yn + zn*zn;
sum(dst^2, dim=-1) = xm*xm + ym*ym + zm*zm;
dist = (xn - xm)^2 + (yn - ym)^2 + (zn - zm)^2
= sum(src**2,dim=-1)+sum(dst**2,dim=-1)-2*src^T*dst
Input:
src: source points, [B, N, C]
dst: target points, [B, M, C]
Output:
dist: per-point square distance, [B, N, M]
"""
B, N, _ = src.shape
_, M, _ = dst.shape
dist = -2 * torch.matmul(src, dst.permute(0, 2, 1))
dist += torch.sum(src ** 2, -1).view(B, N, 1)
dist += torch.sum(dst ** 2, -1).view(B, 1, M)
return dist
# 按照输入的点云数据和索引返回索引的点云数据。
# 例如points为B×2048×3点云,idx为[5,666,1000,2000],
# 则返回Batch中第5,666,1000,2000个点组成的B×4×3的点云集。
# 如果idx为一个[B,D1,...DN],则它会按照idx中的维度结构将其提取成[B,D1,...DN,C]。
def index_points(points, idx):
"""
Input:
points: input points data, [B, N, C]
idx: sample index data, [B, S]
Return:
new_points:, indexed points data, [B, S, C]
"""
device = points.device
B = points.shape[0]
view_shape = list(idx.shape)
view_shape[1:] = [1] * (len(view_shape) - 1)
repeat_shape = list(idx.shape)
repeat_shape[0] = 1
batch_indices = torch.arange(B, dtype=torch.long).to(device).view(view_shape).repeat(repeat_shape)
new_points = points[batch_indices, idx, :]
return new_points
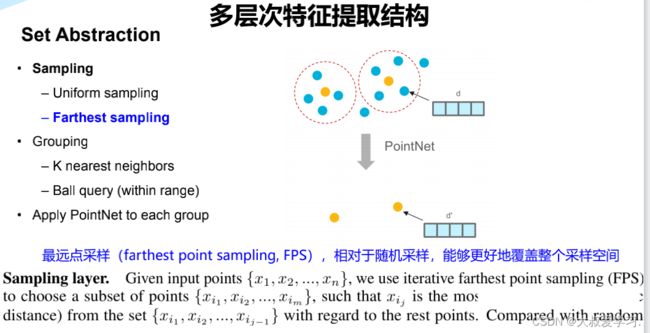
# farthest_point_sample函数完成最远点采样:
# 从一个输入点云中按照所需要的点的个数npoint采样出足够多的点,
# 并且点与点之间的距离要足够远。
# 返回结果是npoint个采样点在原始点云中的索引。
def farthest_point_sample(xyz, npoint):
"""
Input:
xyz: pointcloud data, [B, N, 3]
npoint: number of samples
Return:
centroids: sampled pointcloud index, [B, npoint]
"""
device = xyz.device
B, N, C = xyz.shape
# 初始化一个centroids矩阵,用于存储npoint个采样点的索引位置,大小为B×npoint
# 其中B为BatchSize的个数
centroids = torch.zeros(B, npoint, dtype=torch.long).to(device)
# distance矩阵(B×N)记录某个batch中所有点到某一个点的距离,初始化的值很大,后面会迭代更新
distance = torch.ones(B, N).to(device) * 1e10
# farthest表示当前最远的点,也是随机初始化,范围为0~N,初始化B个;每个batch都随机有一个初始最远点
farthest = torch.randint(0, N, (B,), dtype=torch.long).to(device)
# batch_indices初始化为0~(B-1)的数组
batch_indices = torch.arange(B, dtype=torch.long).to(device)
# 直到采样点达到npoint,否则进行如下迭代:
for i in range(npoint):
# 设当前的采样点centroids为当前的最远点farthest
centroids[:, i] = farthest
# 取出该中心点centroid的坐标
centroid = xyz[batch_indices, farthest, :].view(B, 1, 3)
# 求出所有点到该centroid点的欧式距离,存在dist矩阵中
dist = torch.sum((xyz - centroid) ** 2, -1)
# 建立一个mask,如果dist中的元素小于distance矩阵中保存的距离值,则更新distance中的对应值
# 随着迭代的继续,distance矩阵中的值会慢慢变小,
# 其相当于记录着某个Batch中每个点距离所有已出现的采样点的最小距离
mask = dist < distance
distance[mask] = dist[mask]
# 从distance矩阵取出最远的点为farthest,继续下一轮迭代
farthest = torch.max(distance, -1)[1]
return centroids
Ball Query 球查询
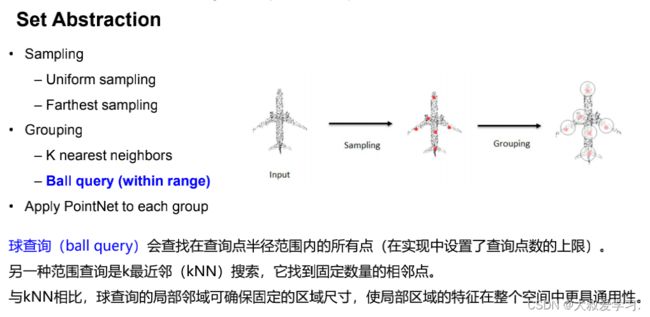
# query_ball_point函数用于寻找球形邻域中的点。
# 输入中radius为球形邻域的半径,nsample为每个邻域中要采样的点,
# new_xyz为centroids点的数据,xyz为所有的点云数据
# 输出为每个样本的每个球形邻域的nsample个采样点集的索引[B,S,nsample]
def query_ball_point(radius, nsample, xyz, new_xyz):
"""
Input:
radius: local region radius
nsample: max sample number in local region
xyz: all points, [B, N, 3]
new_xyz: query points, [B, S, 3]
Return:
group_idx: grouped points index, [B, S, nsample]
"""
device = xyz.device
B, N, C = xyz.shape
_, S, _ = new_xyz.shape
group_idx = torch.arange(N, dtype=torch.long).to(device).view(1, 1, N).repeat([B, S, 1])
# sqrdists: [B, S, N] 记录S个中心点(new_xyz)与所有点(xyz)之间的欧几里德距离
sqrdists = square_distance(new_xyz, xyz)
# 找到所有距离大于radius^2的点,其group_idx直接置为N;其余的保留原来的值
group_idx[sqrdists > radius ** 2] = N
# 做升序排列,前面大于radius^2的都是N,会是最大值,所以直接在剩下的点中取出前nsample个点
group_idx = group_idx.sort(dim=-1)[0][:, :, :nsample]
# 考虑到有可能前nsample个点中也有被赋值为N的点(即球形区域内不足nsample个点),
# 这种点需要舍弃,直接用第一个点来代替即可
# group_first: 实际就是把group_idx中的第一个点的值复制;为[B, S, K]的维度,便于后面的替换
group_first = group_idx[:, :, 0].view(B, S, 1).repeat([1, 1, nsample])
# 找到group_idx中值等于N的点
mask = group_idx == N
# 将这些点的值替换为第一个点的值
group_idx[mask] = group_first[mask]
return group_idx # S个group
Sample and Group
# Sampling + Grouping主要用于将整个点云分散成局部的group,
# 对每一个group都可以用PointNet单独地提取局部的全局特征。
# Sampling + Grouping分成了sample_and_group和sample_and_group_all两个函数,
# 其区别在于sample_and_group_all直接将所有点作为一个group。
# 例如:
# 512 = npoint: points sampled in farthest point sampling
# 0.2 = radius: search radius in local region
# 32 = nsample: how many points in each local region
def sample_and_group(npoint, radius, nsample, xyz, points, returnfps=False):
"""
Input:
npoint:
radius:
nsample:
xyz: input points position data, [B, N, 3]
points: input points data, [B, N, D]
Return:
new_xyz: sampled points position data, [B, npoint, nsample, 3]
new_points: sampled points data, [B, npoint, nsample, 3+D]
"""
B, N, C = xyz.shape
S = npoint
# 从原点云通过最远点采样挑出的采样点作为new_xyz:
# 先用farthest_point_sample函数实现最远点采样得到采样点的索引,
# 再通过index_points将这些点的从原始点中挑出来,作为new_xyz
fps_idx = farthest_point_sample(xyz, npoint) # [B, npoint, C]
torch.cuda.empty_cache()
new_xyz = index_points(xyz, fps_idx) # 中心点
torch.cuda.empty_cache()
# idx:[B, npoint, nsample],代表npoint个球形区域中每个区域的nsample个采样点的索引
idx = query_ball_point(radius, nsample, xyz, new_xyz)
torch.cuda.empty_cache()
grouped_xyz = index_points(xyz, idx) # [B, npoint, nsample, C]
torch.cuda.empty_cache()
# grouped_xyz减去采样点即中心值
grouped_xyz_norm = grouped_xyz - new_xyz.view(B, S, 1, C)
torch.cuda.empty_cache()
# 如果每个点上有新的特征的维度,则拼接新的特征与旧的特征,否则直接返回旧的特征
# 注:用于拼接点特征数据和点坐标数据
if points is not None:
grouped_points = index_points(points, idx)
new_points = torch.cat([grouped_xyz_norm, grouped_points], dim=-1) # [B, npoint, nsample, C+D]
else:
new_points = grouped_xyz_norm
if returnfps:
return new_xyz, new_points, grouped_xyz, fps_idx
else:
return new_xyz, new_points
# sample_and_group_all直接将所有点作为一个group; npoint=1
def sample_and_group_all(xyz, points):
"""
Input:
xyz: input points position data, [B, N, 3]
points: input points data, [B, N, D]
Return:
new_xyz: sampled points position data, [B, 1, 3]
new_points: sampled points data, [B, 1, N, 3+D]
"""
device = xyz.device
B, N, C = xyz.shape
new_xyz = torch.zeros(B, 1, C).to(device)
grouped_xyz = xyz.view(B, 1, N, C)
if points is not None:
new_points = torch.cat([grouped_xyz, points.view(B, 1, N, -1)], dim=-1)
else:
new_points = grouped_xyz
return new_xyz, new_points
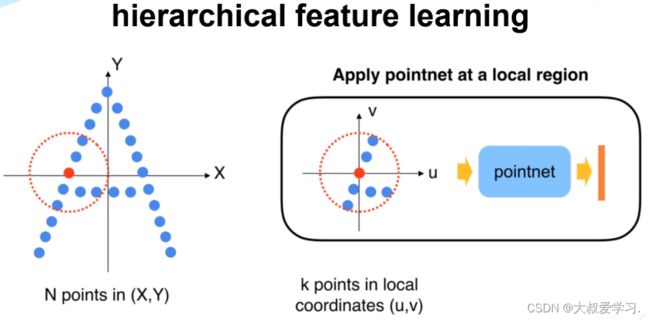
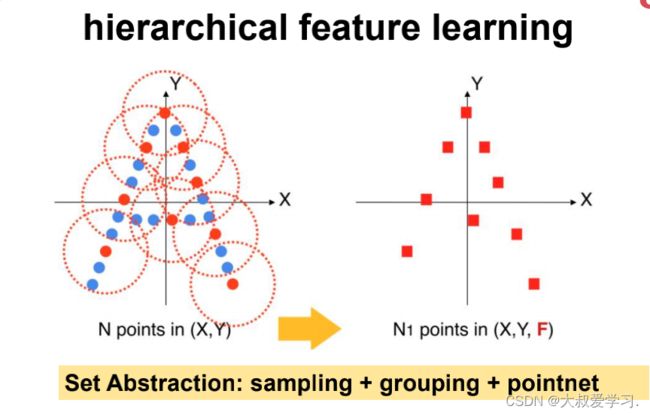
Set Abstraction

# PointNetSetAbstraction类实现普通的Set Abstraction:
# 首先通过sample_and_group的操作形成局部group,
# 然后对局部group中的每一个点做MLP操作,最后进行局部的最大池化,得到局部的全局特征。
class PointNetSetAbstraction(nn.Module):
# 例如:npoint=128, radius=0.4, nsample=64, in_channel=128 + 3, mlp=[128, 128, 256], group_all=False
# 128 = npoint: points sampled in farthest point sampling
# 0.4 = radius: search radius in local region
# 64 = nsample: how many points in each local region
# [128, 128 ,256] = output size for MLP on each point
def __init__(self, npoint, radius, nsample, in_channel, mlp, group_all):
super(PointNetSetAbstraction, self).__init__()
self.npoint = npoint
self.radius = radius
self.nsample = nsample
self.mlp_convs = nn.ModuleList()
self.mlp_bns = nn.ModuleList()
last_channel = in_channel
for out_channel in mlp:
self.mlp_convs.append(nn.Conv2d(last_channel, out_channel, 1))
self.mlp_bns.append(nn.BatchNorm2d(out_channel))
last_channel = out_channel
self.group_all = group_all
def forward(self, xyz, points):
"""
Input:
xyz: input points position data, [B, C, N]
points: input points data, [B, D, N]
Return:
new_xyz: sampled points position data, [B, C, S]
new_points_concat: sample points feature data, [B, D', S]
"""
xyz = xyz.permute(0, 2, 1)
if points is not None:
points = points.permute(0, 2, 1)
# 形成局部的group
if self.group_all:
new_xyz, new_points = sample_and_group_all(xyz, points)
else:
new_xyz, new_points = sample_and_group(self.npoint, self.radius, self.nsample, xyz, points)
# new_xyz: sampled points position data, [B, npoint, C]
# new_points: sampled points data, [B, npoint, nsample, C+D]
new_points = new_points.permute(0, 3, 2, 1) # [B, C+D, nsample,npoint]
# 以下是pointnet操作:
# 对局部group中的每一个点做MLP操作:
# 利用1x1的2d的卷积相当于把每个group当成一个通道,共npoint个通道,
# 对[C+D, nsample]的维度上做逐像素的卷积,结果相当于对单个C+D维度做1d的卷积
for i, conv in enumerate(self.mlp_convs):
bn = self.mlp_bns[i]
new_points = F.relu(bn(conv(new_points)))
# 最后进行局部的最大池化,得到局部的全局特征
new_points = torch.max(new_points, 2)[0]
new_xyz = new_xyz.permute(0, 2, 1)
return new_xyz, new_points
# PointNetSetAbstractionMSG类实现MSG方法的Set Abstraction:
# 这里radius_list输入的是一个list,例如[0.1,0.2,0.4];
# 对于不同的半径做ball query,将不同半径下的点云特征保存在new_points_list中,最后再拼接到一起。
class PointNetSetAbstractionMsg(nn.Module):
# 例如:128, [0.2, 0.4, 0.8], [32, 64, 128], 320, [[64, 64, 128], [128, 128, 256], [128, 128, 256]]
def __init__(self, npoint, radius_list, nsample_list, in_channel, mlp_list):
super(PointNetSetAbstractionMsg, self).__init__()
self.npoint = npoint
self.radius_list = radius_list
self.nsample_list = nsample_list
self.conv_blocks = nn.ModuleList()
self.bn_blocks = nn.ModuleList()
for i in range(len(mlp_list)):
convs = nn.ModuleList()
bns = nn.ModuleList()
last_channel = in_channel + 3
for out_channel in mlp_list[i]:
convs.append(nn.Conv2d(last_channel, out_channel, 1))
bns.append(nn.BatchNorm2d(out_channel))
last_channel = out_channel
self.conv_blocks.append(convs)
self.bn_blocks.append(bns)
def forward(self, xyz, points):
"""
Input:
xyz: input points position data, [B, C, N]
points: input points data, [B, D, N]
Return:
new_xyz: sampled points position data, [B, C, S]
new_points_concat: sample points feature data, [B, D', S]
"""
xyz = xyz.permute(0, 2, 1)
if points is not None:
points = points.permute(0, 2, 1)
B, N, C = xyz.shape
S = self.npoint
# 最远点采样
new_xyz = index_points(xyz, farthest_point_sample(xyz, S))
# 将不同半径下的点云特征保存在new_points_list
new_points_list = []
for i, radius in enumerate(self.radius_list):
K = self.nsample_list[i]
# query_ball_point函数用于寻找球形邻域中的点
group_idx = query_ball_point(radius, K, xyz, new_xyz)
# 按照输入的点云数据和索引返回索引的点云数据
grouped_xyz = index_points(xyz, group_idx)
grouped_xyz -= new_xyz.view(B, S, 1, C)
if points is not None:
grouped_points = index_points(points, group_idx)
# 拼接点特征数据和点坐标数据
grouped_points = torch.cat([grouped_points, grouped_xyz], dim=-1)
else:
grouped_points = grouped_xyz
grouped_points = grouped_points.permute(0, 3, 2, 1) # [B, D, K, S]
for j in range(len(self.conv_blocks[i])):
conv = self.conv_blocks[i][j]
bn = self.bn_blocks[i][j]
grouped_points = F.relu(bn(conv(grouped_points)))
# 最大池化,获得局部区域的全局特征
new_points = torch.max(grouped_points, 2)[0] # [B, D', S]
new_points_list.append(new_points) # 不同半径下的点云特征的列表
new_xyz = new_xyz.permute(0, 2, 1)
# 拼接不同半径下的点云特征
new_points_concat = torch.cat(new_points_list, dim=1)
return new_xyz, new_points_concat
分割中的 Feature Prepogation
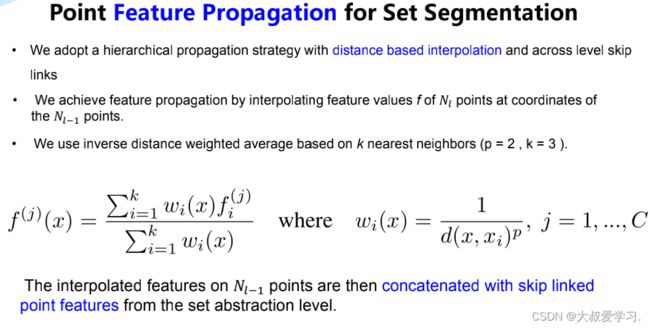
# Feature Propagation的实现主要通过线性差值和MLP完成。
# 当点的个数只有一个的时候,采用repeat直接复制成N个点;
# 当点的个数大于一个的时候,采用线性差值的方式进行上采样,
# 拼接上下采样对应点的SA层的特征,再对拼接后的每一个点都做一个MLP。
class PointNetFeaturePropagation(nn.Module):
def __init__(self, in_channel, mlp): # 例如in_channel=384, mlp=[256, 128]
super(PointNetFeaturePropagation, self).__init__()
self.mlp_convs = nn.ModuleList()
self.mlp_bns = nn.ModuleList()
last_channel = in_channel
for out_channel in mlp:
self.mlp_convs.append(nn.Conv1d(last_channel, out_channel, 1))
self.mlp_bns.append(nn.BatchNorm1d(out_channel))
last_channel = out_channel
def forward(self, xyz1, xyz2, points1, points2):
"""
Input:
xyz1: input points position data, [B, C, N]
xyz2: sampled input points position data, [B, C, S]
points1: input points data, [B, D, N]
points2: input points data, [B, D, S]
Return:
new_points: upsampled points data, [B, D', N] # 上采样后的点
"""
xyz1 = xyz1.permute(0, 2, 1)
xyz2 = xyz2.permute(0, 2, 1)
points2 = points2.permute(0, 2, 1)
B, N, C = xyz1.shape
_, S, _ = xyz2.shape
if S == 1:
# 当点的个数只有一个的时候,采用repeat直接复制成N个点
interpolated_points = points2.repeat(1, N, 1)
else:
# 当点的个数大于一个的时候,采用线性差值的方式进行上采样
dists = square_distance(xyz1, xyz2)
dists, idx = dists.sort(dim=-1)
dists, idx = dists[:, :, :3], idx[:, :, :3] # [B, N, 3]
dist_recip = 1.0 / (dists + 1e-8) # 距离越远的点权重越小
norm = torch.sum(dist_recip, dim=2, keepdim=True)
weight = dist_recip / norm # 对于每一个点的权重再做一个全局的归一化
# 获得插值点
interpolated_points = torch.sum(index_points(points2, idx) * weight.view(B, N, 3, 1), dim=2)
if points1 is not None:
points1 = points1.permute(0, 2, 1)
# 拼接上下采样前对应点SA层的特征
new_points = torch.cat([points1, interpolated_points], dim=-1)
else:
new_points = interpolated_points
new_points = new_points.permute(0, 2, 1)
# 对拼接后每一个点都做一个MLP
for i, conv in enumerate(self.mlp_convs):
bn = self.mlp_bns[i]
new_points = F.relu(bn(conv(new_points)))
return new_points