【零基础强化学习】100行代码教你实现基于DQN的gym车杆控制
基于DQN的gym车杆控制
- 写在前面
- show me code, no bb
- 结果展示
- 写在最后
-
- 谢谢点赞交流!(❁´◡`❁)
更多代码: gitee主页:https://gitee.com/GZHzzz
博客主页: CSDN:https://blog.csdn.net/gzhzzaa
写在前面
- 作为一个新手,写这个强化学习-基础知识专栏是想和大家分享一下自己强化学习的学习历程,希望大家互相交流一起进步!在我的gitee收集了强化学习经典论文:强化学习经典论文,搭建了基于pytorch的典型智能体模型,大家一起多篇多交流,互相学习啊!
show me code, no bb
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import gym
# Hyper Parameters
BATCH_SIZE = 32
LR = 0.01 # learning rate
EPSILON = 0.9 # greedy policy
GAMMA = 0.9 # reward discount
TARGET_REPLACE_ITER = 100 # target update frequency
MEMORY_CAPACITY = 2000
env = gym.make('CartPole-v0')
env = env.unwrapped
N_ACTIONS = env.action_space.n
N_STATES = env.observation_space.shape[0]
ENV_A_SHAPE = 0 if isinstance(env.action_space.sample(), int) else env.action_space.sample().shape # to confirm the shape
class Net(nn.Module):
def __init__(self, ):
super(Net, self).__init__()
self.fc1 = nn.Linear(N_STATES, 50)
self.fc1.weight.data.normal_(0, 0.1) # initialization
self.out = nn.Linear(50, N_ACTIONS)
self.out.weight.data.normal_(0, 0.1) # initialization
def forward(self, x):
x = self.fc1(x)
x = F.relu(x)
actions_value = self.out(x)
return actions_value
class DQN(object):
def __init__(self):
self.eval_net, self.target_net = Net(), Net()
self.learn_step_counter = 0 # for target updating
self.memory_counter = 0 # for storing memory
self.memory = np.zeros((MEMORY_CAPACITY, N_STATES * 2 + 2)) # initialize memory
self.optimizer = torch.optim.Adam(self.eval_net.parameters(), lr=LR)
self.loss_func = nn.MSELoss()
def choose_action(self, x):
x = torch.unsqueeze(torch.FloatTensor(x), 0)
# input only one sample
if np.random.uniform() < EPSILON: # greedy
actions_value = self.eval_net.forward(x)
action = torch.max(actions_value, 1)[1].data.numpy()
action = action[0] if ENV_A_SHAPE == 0 else action.reshape(ENV_A_SHAPE) # return the argmax index
else: # random
action = np.random.randint(0, N_ACTIONS)
action = action if ENV_A_SHAPE == 0 else action.reshape(ENV_A_SHAPE)
return action
def store_transition(self, s, a, r, s_):
transition = np.hstack((s, [a, r], s_))
# replace the old memory with new memory
index = self.memory_counter % MEMORY_CAPACITY
self.memory[index, :] = transition
self.memory_counter += 1
def learn(self):
# target parameter update
if self.learn_step_counter % TARGET_REPLACE_ITER == 0:
self.target_net.load_state_dict(self.eval_net.state_dict())
self.learn_step_counter += 1
# sample batch transitions
sample_index = np.random.choice(MEMORY_CAPACITY, BATCH_SIZE)
b_memory = self.memory[sample_index, :]
b_s = torch.FloatTensor(b_memory[:, :N_STATES])
b_a = torch.LongTensor(b_memory[:, N_STATES:N_STATES+1].astype(int))
b_r = torch.FloatTensor(b_memory[:, N_STATES+1:N_STATES+2])
b_s_ = torch.FloatTensor(b_memory[:, -N_STATES:])
# q_eval w.r.t the action in experience
q_eval = self.eval_net(b_s).gather(1, b_a) # shape (batch, 1)
q_next = self.target_net(b_s_).detach() # detach from graph, don't backpropagate
q_target = b_r + GAMMA * q_next.max(1)[0].view(BATCH_SIZE, 1) # shape (batch, 1)
loss = self.loss_func(q_eval, q_target)
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
dqn = DQN()
print('\nCollecting experience...')
for i_episode in range(400):
s = env.reset()
ep_r = 0
while True:
env.render()
a = dqn.choose_action(s)
# take action
s_, r, done, info = env.step(a)
# modify the reward
x, x_dot, theta, theta_dot = s_
r1 = (env.x_threshold - abs(x)) / env.x_threshold - 0.8
r2 = (env.theta_threshold_radians - abs(theta)) / env.theta_threshold_radians - 0.5
r = r1 + r2
dqn.store_transition(s, a, r, s_)
ep_r += r
if dqn.memory_counter > MEMORY_CAPACITY:
dqn.learn()
if done:
print('Ep: ', i_episode,
'| Ep_r: ', round(ep_r, 2))
if done:
break
s = s_
- 代码全部亲自跑过,你懂的!
结果展示
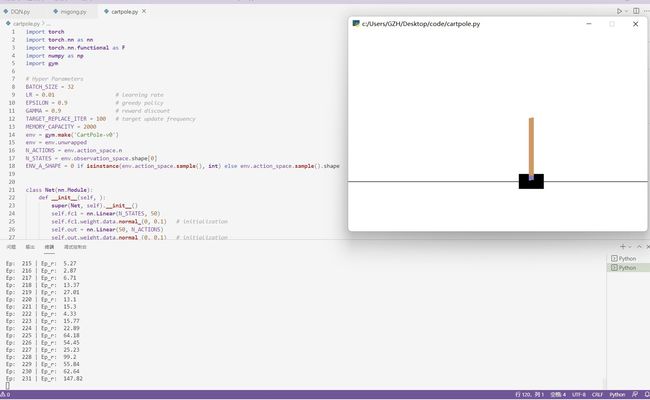
- 相信自己,也可以和我一样优秀!
写在最后
十年磨剑,与君共勉!
更多代码:gitee主页:https://gitee.com/GZHzzz
博客主页:CSDN:https://blog.csdn.net/gzhzzaa
- Fighting!
基于pytorch的经典模型:基于pytorch的典型智能体模型
强化学习经典论文:强化学习经典论文

while True:
Go life
