共轭梯度法的简单直观理解
共轭梯度法的简单直观理解
- 参考资料
- What is: 什么是共轭梯度法?(简单直观理解)
-
- 共轭向量
- 共轭方向
- 误差与残差
- 搜索方向的确定
- 步长,或者说系数alpha
- How to: 怎么用共轭梯度法?(完整算法)
- Python numpy代码
- Why: 为什么共轭梯度法能求解Ax=b?
-
- 二次型
- 将Ax=b问题转化为最优化问题
- 拓展:改进——预处理的共轭梯度法
参考资料
本文是参考以下内容,结合自己的理解做的笔记。请尽量直接访问下述网页。
- 矩阵与数值计算(11)——共轭梯度法
- 共轭梯度法(一):线性共轭梯度
- 无痛版共轭梯度法介绍(更新到第五章)
- 共轭梯度法通俗讲义
第4个资料尤其清晰完备,很多都是参考它的。
What is: 什么是共轭梯度法?(简单直观理解)
共轭梯度法可以看作是梯度下降法(又称最速下降法)的一个改进。
对梯度下降来说
x ⃗ i + 1 = x ⃗ i − α ∇ f \vec x_{i+1}=\vec x_i - \alpha\nabla f xi+1=xi−α∇f
其中 α \alpha α控制了一步要走多远,因此被称为步长,在机器学习里面又称为学习率。
梯度下降法x移动的方向正是函数f的负梯度方向,这代表了局部上f减小最快的方向。
但是局部上减小最快的方向并不代表全局上指向最终解的方向。所以梯度下降法会出现像醉汉下山一样走出zig-zag的路线。如下图

图1 梯度下降法在2维解空间(也就是解向量只有两个维度)走出的路径示意图。
注:假如A是正定对称阵,其2维解空间必定是椭圆的。
为什么会走出这一Z形线呢?因为梯度下降的方向恰好与f垂直,也就是说和等高线垂直。沿着垂直于等高线的方向,一定能让函数减小,也就是最快地下了一个台阶。但是最快下台阶并不意味着最快到达目标位置(即最优解),因为你最终的目标并不是直对着台阶的。
为了修正这一路线,采用另一个方向:即共轭向量的方向。
我们先暂且给出共轭梯度法最后的形式,方便字母的定义:
x ⃗ i + 1 = x ⃗ i − α d ⃗ i \vec x_{i+1}=\vec x_i - \alpha \vec d_i xi+1=xi−αdi
对照梯度下降法,每次向下走的方向不是梯度了,而是专门的一个方向 d ⃗ \vec d d。除此之外和梯度下降法几乎一样。
在推进下一步之前,我们来看看什么是向量共轭。
共轭向量
下面先简要介绍共轭向量
所谓共轭向量,在数学上即:
p i T A p j = 0 p_i^TAp_j=0 piTApj=0
其中A是一个对称正定矩阵。
p i p_i pi和 p j p_j pj是一对共轭的向量。
可见,共轭是正交的推广化,因为向量正交的定义为:
p i T p j = 0 p_i^Tp_j=0 piTpj=0
共轭比正交中间只多了个矩阵A,而矩阵的几何意义正是对一个向量进行线性变换(可见Gilber Strang的线代公开课)。因此共轭向量的意思就是一个向量经过线性变换(缩放剪切和旋转)之后与另一个向量正交。
共轭方向
言归正传,如何找到一个更好的方向呢?我们首先可以看看最完美的方向是什么样的。
下面这张图展示的就是最完美的方向。图中向量e代表的是误差。向量d就是方向向量。
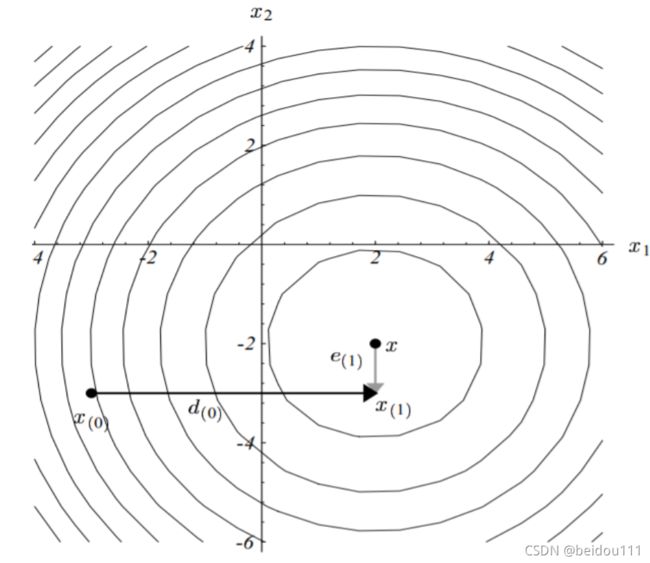
误差e即当前迭代所得到的解与精确解的差值:
e ⃗ i = x ⃗ i − x ⃗ ∗ \vec e_i=\vec x_i- \vec x^* ei=xi−x∗
可惜我们并不能找到误差向量e,因为我们不知道精确解。
那么退而求其次,我们就找误差向量的共轭向量。因为图中可以看出,误差向量是与方向向量垂直的,即正交。刚才说了,共轭就是正交的推广。一个向量乘以一个矩阵之后与另一个方向正交,就是共轭。
即找到
d ⃗ T A e ⃗ = 0 \vec d ^T A \vec e =0 dTAe=0
但是这个公式里面仍然含有e,我们必须想办法去掉它,换成一个我们可以计算的量。
在推进下一步之前,我们先来看看误差与残差这两个概念的区别。
误差与残差
前面写道:
误差error 即当前迭代所得到的解与精确解的差值:
e ⃗ i = x ⃗ i − x ⃗ ∗ \vec e_i=\vec x_i- \vec x^* ei=xi−x∗
但是这种定义显然是没法直接用的,因为我们不知道精确解 x ∗ x^* x∗
那么退而求其次,我们想到,当误差收敛为0的时候,必然满足方程Ax=b,那么由此就可以定义出残差residual:
r ⃗ i = b ⃗ − A x ⃗ i \vec r_i=\vec b-A\vec x_i ri=b−Axi
这个定义的精妙之处在于,它定义了Ax接近b的距离,当距离为0的时候,恰好就是精确解。但是又能避开精确解本身。
在实际的程序中,我们还常常定义相对残差,即上一步迭代和这一步迭代的残差的相对变化率,这里就不再赘述。
显然,误差和残差之间就差了一个矩阵A,他们两者的关系是这样的:
r ⃗ i = b ⃗ − A ( e ⃗ i + x ⃗ ∗ ) = b ⃗ − A x ⃗ ∗ − A e ⃗ i = − A e ⃗ i \vec r_i=\vec b - A(\vec e_i+\vec x^*)=\vec b - A \vec x^* -A\vec e_i = -A\vec e_i ri=b−A(ei+x∗)=b−Ax∗−Aei=−Aei
可见除了A,还多了个负号。
搜索方向的确定
言归正传,利用残差,我们终于可以把误差e给替换掉了:
于是前面的式子就变成了
d ⃗ i T A e ⃗ i = − d ⃗ i T r ⃗ i = 0 \vec d_i ^T A \vec e_i =-\vec d_i ^T \vec r_i=0 diTAei=−diTri=0
那么,这告诉我们:方向向量d,正是与残差向量正交的方向!
接下来我们只需要构建一个与残差正交的向量就可以了。这部分内容是由施密特正交化(更严谨一点的说法是共轭格莱姆-施密特过程)完成的。由于只是一个计算的方法,对概念的理解没有帮助,所以我们跳过,直接给出结论。
每一步搜索方向的时候,这一方向与残差以及前一步的方向有关
d ⃗ i + 1 = r ⃗ i + 1 + β i + 1 d ⃗ i \vec d_{i+1} = \vec r_{i+1} +\beta_{i+1} \vec d_i di+1=ri+1+βi+1di
其中系数 β \beta β可以这样计算:
β i + 1 = r ⃗ i + 1 T r ⃗ i + 1 r ⃗ i T r ⃗ i \beta_{i+1} = \frac{ \vec r_{i+1}^T \vec r_{i+1} } {\vec r_{i}^T \vec r_{i} } βi+1=riTriri+1Tri+1
这个系数beta其实很好记,因为分子就是残差的内积(下一步),分母也是残差的内积(这一步)。
或者说分子就是残差长度的平方(下一步),分母也是残差长度的平方(这一步)。(向量自己和自己的内积就是它的长度)
从另一个角度额外补充一点理解:
每次走的方向恰好是与残差正交的,这意味着:
每走一步恰好能消除残差的一个方向!
所以,当消除了残差所有投影方向上的值,那么就消除了整个残差!
步长,或者说系数alpha
实际上,还有一点没有解决,就是系数 α \alpha α怎么算?
这点的解释我们以后有机会再说,直接给出结论。
α i = r ⃗ i + 1 T r ⃗ i + 1 d ⃗ i T A d ⃗ i \alpha_i = \frac{ \vec r_{i+1}^T \vec r_{i+1} } {\vec d_{i}^T A\vec d_{i} } αi=diTAdiri+1Tri+1
这个alpha的分子和beta一样,就是残差的内积。分母则是方向向量在乘以矩阵A之后的内积。
How to: 怎么用共轭梯度法?(完整算法)
-
设定初值
d ⃗ 0 = r ⃗ 0 = b ⃗ − A x ⃗ 0 \vec d_0=\vec r_0 = \vec b - A \vec x_0 \\ d0=r0=b−Ax0 -
计算系数alpha
α i = r ⃗ i + 1 T r ⃗ i + 1 d ⃗ i T A d ⃗ i \alpha_i = \frac{ \vec r_{i+1}^T \vec r_{i+1} } {\vec d_{i}^T A\vec d_{i} } αi=diTAdiri+1Tri+1 -
迭代一步(向下走一步)
x ⃗ i + 1 = x ⃗ i − α i d ⃗ i \vec x_{i+1}=\vec x_i - \alpha_i \vec d_i xi+1=xi−αidi -
计算残差(此处已经被修改,原文没有被50整除那一个公式 2022-05-27)
如果迭代次数可以被50整除
r ⃗ i + 1 = r ⃗ i − α i A x ⃗ \vec r_{i+1}=\vec r_i - \alpha_i A\vec x ri+1=ri−αiAx
否则
r ⃗ i + 1 = r ⃗ i − α i A d \vec r_{i+1}=\vec r_i - \alpha_i A d ri+1=ri−αiAd -
计算系数beta
β i + 1 = r ⃗ i + 1 T r ⃗ i + 1 r ⃗ i T r ⃗ i \beta_{i+1} = \frac{ \vec r_{i+1}^T \vec r_{i+1} } {\vec r_{i}^T \vec r_{i} } βi+1=riTriri+1Tri+1 -
计算搜索方向 d ⃗ \vec d d
d ⃗ i + 1 = r ⃗ i + 1 + β i + 1 d ⃗ i \vec d_{i+1} = \vec r_{i+1} +\beta_{i+1} \vec d_i di+1=ri+1+βi+1di
重复2~6,直到残差足够小
Python numpy代码
import numpy as np
import scipy.linalg as sl
import matplotlib.pyplot as plt
nn=4 #矩阵的规模 FIXME: 当规模>5的时候会出现震荡,为什么?
accuracy = 1e-6
#使用共轭梯度法, A矩阵有两个条件:1. 正定(特征值全为正数) 2.对称
A = sl.pascal(nn, exact=False) # A是对称正定矩阵, 10阶帕斯卡矩阵, exact=False示用float元素而非默认的uint
b = np.arange(1., nn+1., 1.)
x0 = np.array([2.0]*nn) #x0
def Conjugate_Gradient_Method(A,b,x0):
#1. Set initial value
x = x0
r = b - matrixVecProd(A, x)
d = r
rr = vecVecProd(r, r) #在计算beta的时候可以复用
iter = 0
relativeResidual = 0.1
while( relativeResidual > accuracy or iter <1):
#2. Compute alpha
Ad = matrixVecProd(A, d) # 在计算r_new和alpha的时候可以复用
alpha = rr / vecVecProd(d, Ad)
#3. step forward
x = x + alpha * d
#4. compute residual
if iter % 50 == 0 :
r_new = b - matrixVecProd(A, x)
else :
r_new = r - alpha * Ad
#5. compute beta
rr_new = vecVecProd(r_new, r_new)
beta = rr_new / rr
rr = rr_new
#6. compute search direction
d = r_new + beta * d
iter += 1
relativeResidual = np.linalg.norm(r_new) / np.linalg.norm(r)
r = r_new
print("iter",iter, "relativeResidual",relativeResidual)
return x
def matrixVecProd(A, vec):
res = np.dot(A, vec)
return res
def vecVecProd(vec1, vec2):
res = np.dot(vec1, vec2)
return res
# ----------------TEST-------------
def TEST_A(A,b):
print(A)#A矩阵有两个条件:1. 正定(特征值全为正数) 2.对称
eig = np.linalg.eig(A)
print("eig=",eig[0]) #eig[0]取的是特征值
print("b",b)
# ----------------ENDTEST-------------
def main():
res = Conjugate_Gradient_Method(A, b, x0)
print("-------------numerical result-------------------")
print(res)
print("-------------accurate result-------------------")
accRes=np.dot(np.linalg.inv(A), b)
print(accRes)
if __name__ == "__main__":
# TEST_A(A,b) # 可以先打印出来看看
main()
这个代码仍然是有问题的,主要是矩阵规模大的时候就会震荡,我也不清楚为什么。
这里照抄一下刘天添课上的算法

Why: 为什么共轭梯度法能求解Ax=b?
说了这么多,其实有一个关键问题没有讲,那就是:为什么共轭梯度法能求解Ax=b?
按理说,共轭梯度法是函数最优化的方法,怎么就扯上了求解Ax=b了呢?
实际上使用共轭梯度法的两个条件
- A是对称的
- A是正定的
也和这个原理有关。
数学家求解问题的思路是:把不会的问题转化成会的问题,再套用会的问题的思路求解问题。
为了说明这一点,我们要从线性代数的二次型入手。我们可以先复习一下二次型,了解一下它是什么。
二次型
二次型就是关于向量的二次函数。
我们高中学过的二次函数通用表达式为
f ( x ) = a x 2 + b x + c f(x) = a x^2 +bx+c f(x)=ax2+bx+c
如果把其中的x替换为向量x,并且把a x^2 替换为
x^T A x 就得到了
f ( x ) = x T A x + b x + c f(x) = x^T A x +bx+c f(x)=xTAx+bx+c
这就是二次型。
二次型求导得到
f ′ ( x ) = 1 2 ( A x + A T x ) + b f'(x) = \frac{1}{2}( A x + A^T x)+b f′(x)=21(Ax+ATx)+b
将Ax=b问题转化为最优化问题
我们本来求解的是
A x = b A\mathbf x=\bf b Ax=b
这个问题被转化为了求某个函数的导数等于0的问题,即驻值问题。
我们设这个函数为g(x)。我们的问题即:
g ′ ( x ) = 0 x ∗ = a r g m i n x g ( x ) g'(x)=0\\ x^*=argmin_x g(x) g′(x)=0x∗=argminxg(x)
argmin_x的意思就是我们求取最小值的时候的x,而不是最小值本身。
这个 x ∗ x^* x∗就是最终解。
那么怎么联系到Ax=b呢?
我们只要改造这个函数g,让它的导数恰好就是Ax-b=0就好了!!
而这个函数,恰好就是二次型函数!
即
g ′ ( x ) = A x − b g'(x)=Ax-b g′(x)=Ax−b
于是求最小值得问题就能够被转化为求Ax=b的问题!
这里有个小小的瑕疵:
实际上,二次型g(x)的导数是
g ′ ( x ) = 1 / 2 ( A T + A ) x − b g'(x)=1/2 (A^T+A)x-b g′(x)=1/2(AT+A)x−b
所以我们就要限定 A T = A A^T=A AT=A,即限定A是对称的。这就是第一个条件的由来!
to be continued
2022-05-20