论文阅读 (64):Weakly-supervised Video Anomaly Detection with Robust Temporal Feature Magnitude Learning
文章目录
- 1 引入
-
- 1.1 题目
- 1.2 代码
- 1.3 摘要
- 1.4 Bib
- 2 RTFM
-
- 2.1 理论动机
- 2.2 多尺度时间特征学习
- 2.3 特征量级学习
- 2.4 RTFM帧级分类器
- 3 实验
-
- 3.1 数据集和度量标准
- 3.2 实现细节
1 引入
1.1 题目
2021CVPR:用于弱监督视频异常检测的健壮性时间特征量级学习 (Weakly-supervised video anomaly detection with robust temporal feature magnitude learning)
1.2 代码
Torch:https://github.com/tianyu0207/RTFM
1.3 摘要
弱监督视频级别异常检测是一个典型的多示例学习 (Multi-instance learning, MIL) 问题,每一个视频看作是一个包含多个帧的包,目的是判断包中是否包含异常片段。目前的检测方法性能优异,但它们对正实例,即异常视频中罕见的异常片段的识别,在很大程度上受到了支配性负实例的影响,特别是当异常事件是与正常事件相比时只有很小差异的细微异常时。在许多忽略重要视频时间依赖性的方法中,这个问题更加严重。
为了解决这个问题,提出了健壮性时间特征量级学习:
1)训练了一个特征量级学习函数来有效地识别正实例,大大提高了MIL方法对异常视频负实例的鲁棒性;
2)采用空洞卷积 (Dilated convolutions) 和自注意力机制来捕获长距离和短距离的时间依赖性,从而更可靠地学习特征量级。
1.4 Bib
@inproceedings{Tian:2021:49754986,
author = {Yu Tian and Guan Song Pang and Yuan Hong Chen and Rajvinder Singh and Johan W Verjans and Gustavo Carneiro},
title = {Weakly-supervised video anomaly detection with robust temporal feature magnitude learning},
booktitle = {{IEEE/CVF} International Conference on Computer Vision},
pages = {4975--4986},
year = {2021},
url = {https://openaccess.thecvf.com/content/ICCV2021/html/Tian_Weakly-Supervised_Video_Anomaly_Detection_With_Robust_Temporal_Feature_Magnitude_Learning_ICCV_2021_paper.html}
}
2 RTFM
RTFM的目的是基于弱标记视频来最大程度地区分异常视频和正常视频。给定训练视频的集合 D = { ( F i , y i ) } i = 1 ∣ D ∣ \mathcal{D}=\{(\mathbf{F}_i,y_i)\}_{i=1}^{|\mathcal{D}|} D={(Fi,yi)}i=1∣D∣,其中 F ∈ F ⊂ R T × D \mathbf{F}\in\mathcal{F}\subset\mathbb{R}^{T\times D} F∈F⊂RT×D是 T T T个视频帧的 D D D维预计算特征,例如I3D和C3D; y ∈ Y = { 0 , 1 } , 1 y\in\mathcal{Y}=\{0,1\},1 y∈Y={0,1},1表示异常, 0 0 0反之。令 r θ , ϕ ( F ) = f ϕ ( s θ ( F ) ) r_{\theta,\phi}(\mathbf{F})=f_{\phi}(s_\theta(\mathbf{F})) rθ,ϕ(F)=fϕ(sθ(F))表示RTFM模型,其将返回一个 T T T维特征 [ 0 , 1 ] T [0,1]^T [0,1]T以表示视频帧是否异常。
模型的训练包括包括端到端多尺度时间特征学习、特征量级学习,以及MIL 分类器。损失函数如下:
min θ , ϕ ∑ i , j = 1 ∣ D ∣ ℓ s ( s θ ( F i ) , s θ ( F j ) , y i , y j ) + ℓ f ( f ϕ ( s θ ( F i ) ) , y i ) , \min_{\theta,\phi}\sum_{i,j=1}^{|\mathcal{D}|}\ell_s(s_\theta(\mathbf{F}_i),s_\theta(\mathbf{F}_j),y_i,y_j)+\ell_f(f_\phi(s_\theta(\mathbf{F}_i)),y_i), θ,ϕmini,j=1∑∣D∣ℓs(sθ(Fi),sθ(Fj),yi,yj)+ℓf(fϕ(sθ(Fi)),yi),其中 s θ : F → X ⊂ R T × D s_\theta: \mathcal{F}\rightarrow\mathcal{X}\subset\mathbb{R}^{T\times D} sθ:F→X⊂RT×D是时间特征提取器、 f ϕ : X → [ 0 , 1 ] T f_\phi: \mathcal{X}\rightarrow[0,1]^T fϕ:X→[0,1]T是一个帧级分类器、 ℓ s ( ⋅ ) \ell_s(\cdot) ℓs(⋅)表示最大化正常与异常视频top- k k k个帧特征之间的差异性的损失函数,以及 f ϕ ( ⋅ ) f_\phi(\cdot) fϕ(⋅)是一个使用以上top- k k k个特征的训练损失。
2.1 理论动机
Top- k k k中的基本假设为,正包中包含最少数量的正实例,负包也包含正实例只是数量更少,它进一步假设分类器可以分离正实例和负实例。我们的问题与其不同,因此负包中并不包含正实例,当然也没有其分类器假设。
遵循先前的命名规则,令 X = s θ ( F ) \mathbf{X}=s_\theta(\mathbf{F}) X=sθ(F)表示提取的视频时间特征,其中每一个帧特征 x t \mathbf{x}_t xt对应 X \mathbf{X} X的每一行。令 x + ∼ P x + ( x ) \mathbf{x}^+\sim P_x^+(\mathbf{x}) x+∼Px+(x)和 x − ∼ P x − ( x ) \mathbf{x}^-\sim P_x^-(\mathbf{x}) x−∼Px−(x)分别表示异常帧和正常帧。一个异常视频 X + \mathbf{X}^+ X+包含 μ \mu μ个来自 P x + ( x ) P_x^+(\mathbf{x}) Px+(x)的帧,余下 ( T − μ ) (T-\mu) (T−μ)来自 P x − ( x ) P_x^-(\mathbf{x}) Px−(x),正常视频中的所有帧则均来自 P x − ( x ) P_x^-(\mathbf{x}) Px−(x)。
为了学习一个能够区分视频和帧是否异常的函数,定义了一个使用帧的特征量级进行分类的函数,对此定义一个更加温和的假设如下:
E [ ∥ x + ∥ 2 ] ≥ E [ ∥ x − ∥ 2 ] . \mathbb{E}[\|\mathbf{x}^+\|_2]\geq\mathbb{E[}\|\mathbf{x}^-\|_2]. E[∥x+∥2]≥E[∥x−∥2].这意味着通过学习来自 X \mathbf{X} X的帧级别特征,正常帧的应当有相较于异常帧更小的特征量级。基于以上假设和视频中的top- k k k特征的平均特征量级的优化定义如下:
g θ , k ( X ) = max Ω k ( X ) ⊆ { x t } t = 1 T 1 k ∑ x t ∈ Ω k ( X ) ∥ x t ∥ 2 , (2) \tag{2} g_{\theta,k}(\mathbf{X})=\max_{\Omega_k(\mathbf{X})\subseteq\{\mathbf{x}_t\}_{t=1}^T}\frac{1}{k}\sum_{\mathbf{x}_t\in\Omega_k(\mathbf{X})}\|\mathbf{x}_t\|_2, gθ,k(X)=Ωk(X)⊆{xt}t=1Tmaxk1xt∈Ωk(X)∑∥xt∥2,(2)其中 g θ , k ( ⋅ ) g_{\theta,k}(\cdot) gθ,k(⋅)是由 θ \theta θ参数化的函数、 Ω k ( X ) \Omega_k(\mathbf{X}) Ωk(X)是 { x t } \{\mathbf{x}_t\} {xt}的大小为 k k k的子集。异常视频与正常视频的可分离性 (separability) 定义为:
d θ , k ( X + , X − ) = g θ , k ( X + ) − g θ , k ( X − ) . (3) \tag{3} d_{\theta,k}(\mathbf{X}^+,\mathbf{X}^-)=g_{\theta,k}(\mathbf{X}^+)-g_{\theta,k}(\mathbf{X}^-). dθ,k(X+,X−)=gθ,k(X+)−gθ,k(X−).(3) 定义来自 Ω k ( X + ) \Omega_k(\mathbf{X}^+) Ωk(X+)帧的异常概率为:
p k + ( X + ) = min ( μ , k ) k + ϵ , p_k^+(\mathbf{X}^+)=\frac{\min(\mu,k)}{k+\epsilon}, pk+(X+)=k+ϵmin(μ,k),其中 ϵ > 0 \epsilon>0 ϵ>0,而对于所有来自 Ω k ( X − ) \Omega_k(\mathbf{X}^-) Ωk(X−)的帧,有 p k + ( X − ) = 0 p_k^+(\mathbf{X}^-)=0 pk+(X−)=0。这意味着在 k ≤ μ k\leq\mu k≤μ时,将于 Ω k ( X + ) \Omega_k(\mathbf{X}^+) Ωk(X+)的top- k k k个帧中找到异常帧。
定理3.1:异常与正常视频的预期可分离性 假设 E [ ∥ x + ∥ 2 ] ≥ E [ ∥ x − ∥ 2 ] \mathbb{E}[\|\mathbf{x}^+\|_2]\geq\mathbb{E[}\|\mathbf{x}^-\|_2] E[∥x+∥2]≥E[∥x−∥2],其中 X + \mathbf{X}^+ X+包含 μ ∈ [ 1 , T ] \mu\in[1,T] μ∈[1,T]个异常实例和 ( T − μ ) (T-\mu) (T−μ)个正常实例,以及 X − \mathbf{X}^- X−包含 T T T个正常实例。令 D θ , k ( ⋅ ) D_{\theta,k}(\cdot) Dθ,k(⋅)表示 d θ , k ( ⋅ ) d_{\theta,k}(\cdot) dθ,k(⋅)的随机变量:
1)如果 0 < k < μ 0
0 ≤ E [ D θ , k ( X + , X − ) ] ≤ E [ D θ , k + 1 ( X + , X − ) ] 0\leq\mathbb{E}[D_{\theta,k}(\mathbf{X}^+,\mathbf{X}^-)]\leq\mathbb{E}[D_{\theta,k+1}(\mathbf{X}^+,\mathbf{X}^-)] 0≤E[Dθ,k(X+,X−)]≤E[Dθ,k+1(X+,X−)] 2)对于一个有限的 μ \mu μ,有
lim k → ∞ E [ D θ , k ( X + , X − ) ] = 0. \lim_{k\rightarrow\infty}\mathbb{E}[D_{\theta,k}(\mathbf{X}^+,\mathbf{X}^-)]=0. k→∞limE[Dθ,k(X+,X−)]=0. 该定理的第一部分意味着在 k ≤ μ k\leq\mu k≤μ时,随着 k k k的增加,异常视频和正常视频之间的可分离性趋于增加,即使它包含一些正常样本。定理的第二部分意味着,当包含多个top实例时,由于正负包中的负实例数量过多,异常和正常视频的分数将变得无法区分。一个示意如图1,其中 score ( X ) = g θ , k ( X ) \text{score}(\mathbf{X})=g_{\theta,k}(\mathbf{X}) score(X)=gθ,k(X)、 Δ score ( X + , X − ) = d θ , k ( X + , X − ) \Delta\text{score}(\mathbf{X}^+,\mathbf{X}^-)=d_{\theta,k}(\mathbf{X}^+,\mathbf{X}^-) Δscore(X+,X−)=dθ,k(X+,X−),以及 ϵ = 0.4 \epsilon=0.4 ϵ=0.4。该定理指明:
1)当 k ≤ μ k\leq\mu k≤μ时,通过最大化正常视频与异常视频top- k k k个帧之间的可分离性,能够加速异常视频与帧的分类过程;
2)使用top- k k k个特征可以更有效地训练帧分类器,因为异常视频中的top- k k k个实例大部分都是异常的,并且将使用top- k k k个正常片段。此外,仅使用top- k k k的另一个原因是所设计的方法可以在相当少的训练样本下进行。
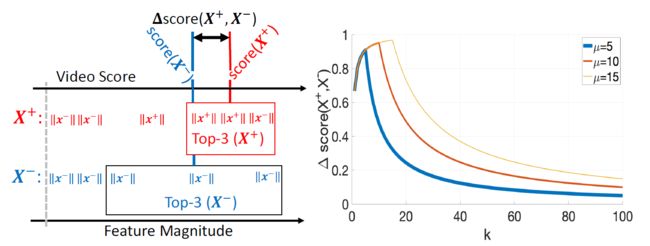
图1:RTFM训练一个特征量级学习函数来高效地检测异常帧并提升MIL方法对异常视频中正常帧的健壮性。左图:异常视频与正常视频的时间特征量级。假设 μ = 3 \mu=3 μ=3表示异常视频中异常帧的数量,将最大化异常视频与正常视频的分数差异 Δ score ( X + , X − ) \Delta\text{score}(\mathbf{X}^+,\mathbf{X}^-) Δscore(X+,X−)。参与计算的帧为 k ≤ μ k\leq\mu k≤μ个具有最大时间特征量级帧。右图: Δ score ( X + , X − ) \Delta\text{score}(\mathbf{X}^+,\mathbf{X}^-) Δscore(X+,X−)在 k ≤ μ k\leq\mu k≤μ时逐渐增大,而将 k > μ k>\mu k>μ时逐渐降低。这表明 k ≈ μ k\approx\mu k≈μ时RTFM在正负视频之间提供了一个很好的差异,即使一些正常帧也具有较大的特征量级
2.2 多尺度时间特征学习
受视频理解注意力机制的启发,所提出的多尺度时间网络 (multi-scale temporal network, MTN) 可以捕捉视频帧之间的多来源局部时间依赖和全局时间依赖。MTN使用时域上的空洞卷积金字塔来学习视频帧的多尺度表示。空洞卷积通常应用于空间域,目的是在不损失分辨率的情况下扩展感受野。在这里,空洞卷积被用于时间维度,因为捕获相邻视频帧的多尺度时间依赖性以进行异常检测很重要。
MTN从预计算特征 F = [ f d ] d = 1 D \mathbf{F}=[\mathbf{f}_d]_{d=1}^D F=[fd]d=1D上学习多尺度时间特征。对于给定特征 f d ∈ R T \mathbf{f}_d\in\mathbb{R}^T fd∈RT,1D空洞卷积定义如下:
f k ( l ) = ∑ d = 1 D W k , d ( l ) ∗ ( l ) f d , (4) \tag{4} \mathbf{f}_k^{(l)}=\sum_{d=1}^D\mathbf{W}_{k,d}^{(l)}*^{(l)}\mathbf{f}_d, fk(l)=d=1∑DWk,d(l)∗(l)fd,(4)其中 W k , d ( l ) ∈ R W \mathbf{W}_{k,d}^{(l)}\in\mathbb{R}^W Wk,d(l)∈RW表示卷积核、 k ∈ { 1 , … , D / 4 } k\in\{1,\dots,D/4\} k∈{1,…,D/4}、 l ∈ { PDC 1 , PDC 2 , PDC 3 } l\in\{\text{PDC}_1,\text{PDC}_2,\text{PDC}_3\} l∈{PDC1,PDC2,PDC3}、 W W W表示卷积核大小、 ∗ ( l ) *^{(l)} ∗(l)基于索引 l l l的卷积操作,以及 f k ( l ) \mathbf{f}_k^{(l)} fk(l)表示应用于时间维度的空间卷积的输出特征。空洞因子 { PDC 1 , PDC 2 , PDC 3 } \{\text{PDC}_1,\text{PDC}_2,\text{PDC}_3\} {PDC1,PDC2,PDC3}设置为 { 1 , 2 , 4 } \{1,2,4\} {1,2,4}。
自注意力机制用于补充视频帧之间的全局时间依赖,其已在视频理解中的长期时间依赖、图像分类,以及对象检测展现出优异性能。受到GCN中对全局时间信息的建模,空间自注意力被重写以适应时间维度并捕捉全局时间上下文,即生成一个用于评估帧之间关系的注意力图 M ∈ R T × T \mathbf{M}\in\mathbb{R}^{T\times T} M∈RT×T。
时间注意力模型 (Temporal self-attention, TSA) :
1)首先使用 1 × 1 1\times1 1×1卷积减小空间维度,即 F ∈ R T × D → F ( c ) = C o n v 1 × 1 ( F ) ∈ R T × D / 4 \mathbf{F}\in\mathbf{R}^{T\times D}\to\mathbf{F}^{(c)}=Conv_{1\times1}(\mathbf{F})\in\mathbb{R}^{T\times D/4} F∈RT×D→F(c)=Conv1×1(F)∈RT×D/4;
2)应用3个独立的 1 × 1 1\times1 1×1卷积层,将 F ( c ) \mathbf{F}^{(c)} F(c)转换为 F ( c i ) = C o n v 1 × 1 ( F ( c ) ) \mathbf{F}^{(ci)}=Conv_{1\times1}(\mathbf{F^{(c)}}) F(ci)=Conv1×1(F(c)),其中 i ∈ { 1 , 2 , 3 } i\in\{1,2,3\} i∈{1,2,3};
3)构建注意力图:
M = ( F c 1 ) ( F ( c 2 ) ) T , \mathbf{M}=(\mathbf{F}^{c1})(F^{(c2)})^T, M=(Fc1)(F(c2))T,其用于获取
F ( c 4 ) = C o n v 1 × 1 ( M F c 3 ) \mathbf{F}^{(c4)}=Conv_{1\times1}(\mathbf{MF}^{c3}) F(c4)=Conv1×1(MFc3) 4)计算:
F T S A = F c 4 + F c 3 . (5) \tag{5} \mathbf{F}^{TSA}=\mathbf{F}^{c4}+\mathbf{F}^{c3}. FTSA=Fc4+Fc3.(5) 5)MTN的输出由PDC和MTN模块的输出串联构成:
F ‾ = [ F ( l ) ] l ∈ L ∈ T × D , \overline{\mathbf{F}}=[\mathbf{F}^{(l)}]_{l\in\mathcal{L}}\in\mathbf{T\times D}, F=[F(l)]l∈L∈T×D,其中 L = { PDC 1 , PDC 2 , PDC 3 , TSA } \mathcal{L}=\{\text{PDC}_1,\text{PDC}_2,\text{PDC}_3,\text{TSA}\} L={PDC1,PDC2,PDC3,TSA};
6)跳跃连接以获取包含原始特征与事件特征的表示:
X = s θ ( F ) = F ‾ + F . \mathbf{X}=s_\theta(\mathbf{F})=\overline{\mathbf{F}}+\mathbf{F}. X=sθ(F)=F+F.
2.3 特征量级学习
首先提出一个关联 s θ ( F ) s_\theta(\mathbf{F}) sθ(F)的损失函数 ℓ s \ell_s ℓs,其中来自正常视频的最大 k k k个特征量级被最小化,而来自异常视频的该特征被最大化:
ℓ s ( s θ ( F i ) , s θ ( F j ) , y i , y j ) = { max ( 0 , m − d θ , k ( X i , X j ) ) , y i = 1 , y j = 0 0 , o t h e r w i s e , (6) \tag{6} \ell_s(s_\theta(\mathbf{F}_i),s_\theta(\mathbf{F}_j),y_i,y_j)= \left\{ \begin{array}{ll} \max\left(0,m-d_{\theta,k}(\mathbf{X}_i,\mathbf{X}_j)\right)&,y_i=1,y_j=0\\ 0&,otherwise, \end{array} \right. ℓs(sθ(Fi),sθ(Fj),yi,yj)={max(0,m−dθ,k(Xi,Xj))0,yi=1,yj=0,otherwise,(6)其中 m m m是预定义间隔、 X i = s θ ( F i ) , X j \mathbf{X}_i=s_\theta(\mathbf{F}_i),\mathbf{X}_j Xi=sθ(Fi),Xj分别表示异常和正常视频,以及 d θ , k ( ⋅ ) d_{\theta,k}(\cdot) dθ,k(⋅)表示可分离性函数。
2.4 RTFM帧级分类器
二元交叉熵损失函数基于 Ω k ( X ) \Omega_k(\mathbf{X}) Ωk(X)来学习一个帧级分类器:
ℓ f ( f ϕ ( s θ ( F ) , y ) ) = ∑ x ∈ Ω k ( X ) − ( y log ( f ϕ ( x ) ) + ( 1 − y ) log ( 1 − f ϕ ( x ) ) ) , \ell_f(f_\phi(s_\theta(\mathbf{F}),y))=\sum_{\mathbf{x}\in\Omega_k(\mathbf{X})}-(y\log(f_\phi(\mathbf{x}))+(1-y)\log(1-f_\phi(\mathbf{x}))), ℓf(fϕ(sθ(F),y))=x∈Ωk(X)∑−(ylog(fϕ(x))+(1−y)log(1−fϕ(x))),其中 x = s θ ( f ) \mathbf{x}=s_\theta(\mathbf{f}) x=sθ(f)。注意 ℓ f ( ⋅ ) \ell_f(\cdot) ℓf(⋅)通过时间平滑 (强制向量帧的异常得分相似)
( f ϕ ( s θ ( f t ) ) − f ϕ ( s θ ( f t − 1 ) ) ) (f_\phi(s_\theta(\mathbf{f_t}))-f_\phi(s_\theta(\mathbf{f_{t-1}}))) (fϕ(sθ(ft))−fϕ(sθ(ft−1)))和稀疏正则 (强加一个先验,表明异常事件在每个异常视频中都很少见)
∑ t = 1 T ∣ f ϕ ( s θ ( f t ) ) ∣ \sum_{t=1}^T|f_\phi(s_\theta(\mathbf{f_t}))| t=1∑T∣fϕ(sθ(ft))∣来实现。
3 实验
3.1 数据集和度量标准
四个多场景基准数据集被使用:
1)UCF-Crime是一个大规模异常检测数据集,包含来自真实街道和室内监控摄像头的1900个未修剪视频,总时长为128小时。与ShanghaiTech中的静态背景不同,UCF-Crime的背景更为复杂多样。训练集和测试集包含同样数量的异常和正常视频,其中训练集包含视频级标注,共1610,异常事件共13类;测试集包含帧级标注,共290。
2)XD-Violence是一个近期提出的大规模多场景数据集,收集了现实生活电影、在线视频、体育视频流、监控摄像机,以及CCTV。数据集的总时长为217小时,包含4754 个未修剪视频,训练集具有视频级标签,测试集具有帧级标签。它是目前最大的公开视频异常检测数据集。
3)ShanghaiTech是一个来自固定角度视频监控的中型数据集,包含307个正常视频和130个异常视频。原始数据集是异常检测任务的常用基准,其假设正常训练数据的可用性。Zhong等人通过选择异常测试视频的子集到训练数据中,以重组数据集并构建弱监督训练集,使训练集和测试集覆盖所有13个背景场景。
4)UCSD-Peds是一个包含两个子数据集的小型数据集。Ped1和Ped2分别包含70和28个视频。通过随机选择6个异常视频和4个正常视频到训练集中,重新制定用于弱监督异常检测的数据集,其余的作为测试集。最终展示该过程10 次以上的平均结果。
度量标准:帧级AUC作为所有数据集的衡量标准。XD-Violence额外使用平均精度 (Average precision, AP)。
3.2 实现细节
1)每个视频被划分为32个帧;
2)对于所有的数据集,设置公示6中的 m = 100 m=100 m=100, k = 3 k=3 k=3;
3)三个全连接层FC的节点分别设置为512、128,以及1,其后接ReLU函数,且设置丢弃率为0.7;
4)预训练I3D和C3D的mix_5c和fc_6层分别提取2048维与4096维特征;
5)空洞卷积的空洞率分别设置维1、2,以及4;
6)每个空洞卷积分支使用 3 × 1 3\times1 3×1Conv1D;
7)自注意力快使用 1 × 1 1\times1 1×1Conv1D;
8)优化方法使用Adam,权重衰减设置为0.0005,批次大小64 (32异常32正常),训练轮次50;
9)ShanghaiTech和UCF-Crime学习率设置为0.001,XD-Violence设置为0.0001;
10)使用Pytorch实现;
11)对比方法的结果使用其与本方法网络骨架一致的发表结果。