【双目相机】基于SGBM的双目相机测距(python)
前期准备
需要基于前两篇文章拍摄、保存图片:
1.【双目相机】基于matlab的参数标定1-使用双目相机拍照
2.【双目相机】基于matlab的参数标定2-使用matlab标定
编写代码,自动获取上一节(【双目相机】基于matlab的参数标定2-使用matlab标定)的excel文件内的相机参数,并用于双目测距,代码如下
#从excel里读取数据
import cv2
import pandas as pd
import numpy as np
import time
import random
import math
# -----------------------------------双目相机的基本参数---------------------------------------------------------
# left_camera_matrix 左相机的内参矩阵
# right_camera_matrix 右相机的内参矩阵
#
# left_distortion 左相机的畸变系数 格式(K1,K2,P1,P2,0)
# right_distortion 右相机的畸变系数
# -------------------------------------------------------------------------------------------------------------
# 左镜头的内参,如焦距
file_path = r'C:\out1.xlsx' # r对路径进行转义,windows需要
raw_data = pd.read_excel(file_path) # header=0表示第一行是表头,就自动去除了
#raw_data = pd.read_excel(file_path, header=0)
#print(raw_data)
data = raw_data.values # 只提取表中信息
#print(data)
np.array([1,2,3,4,5,6,7,8,9],dtype='float32');
left_camera_matrix = np.array((data[4:7, 1:4]),dtype='float64');
right_camera_matrix = np.array((data[9:12, 1:4]),dtype='float64');
# 畸变系数,K1、K2、K3为径向畸变,P1、P2为切向畸变:[K1,K2,P1,P2,K3]
K1left= np.array((data[7:8, 1:2]),dtype='float64');
K2left= np.array((data[7:8, 2:3]),dtype='float64');
K3left= np.array((data[7:8, 3:4]),dtype='float64');
P1left= np.array((data[8:9, 1:2]),dtype='float64');
P2left= np.array((data[8:9, 2:3]),dtype='float64');
K1right= np.array((data[12:13, 1:2]),dtype='float64');
K2right= np.array((data[12:13, 2:3]),dtype='float64');
K3right= np.array((data[12:13, 3:4]),dtype='float64');
P1right= np.array((data[13:14, 1:2]),dtype='float64');
P2right= np.array((data[13:14, 2:3]),dtype='float64');
#畸变系数,K1、K2、K3为径向畸变,P1、P2为切向畸变:[K1,K2,P1,P2,K3]
left_distortion =np.hstack((K1left,K2left,P1left,P2left,K3left))
right_distortion =np.hstack((K1right,K2right,P1right,P2right,K3right))
# 旋转矩阵
R = np.array((data[1:4, 1:4]),dtype='float64');
# 平移矩阵
T = np.array(np.transpose(data[0:1, 1:4]),dtype='float64');
#T = np.array([-55.4164455,-0.307896388,-3.669759334])
size = (320, 480)
R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = cv2.stereoRectify(left_camera_matrix, left_distortion,
right_camera_matrix, right_distortion, size, R,
T)
# 校正查找映射表,将原始图像和校正后的图像上的点一一对应起来
left_map1, left_map2 = cv2.initUndistortRectifyMap(left_camera_matrix, left_distortion, R1, P1, size, cv2.CV_16SC2)
right_map1, right_map2 = cv2.initUndistortRectifyMap(right_camera_matrix, right_distortion, R2, P2, size, cv2.CV_16SC2)
print(Q)
# --------------------------鼠标回调函数---------------------------------------------------------
# event 鼠标事件
# param 输入参数
# -----------------------------------------------------------------------------------------------
def onmouse_pick_points(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
threeD = param
print('\n像素坐标 x = %d, y = %d' % (x, y))
# print("世界坐标是:", threeD[y][x][0], threeD[y][x][1], threeD[y][x][2], "mm")
print("世界坐标xyz 是:", threeD[y][x][0] / 1000.0, threeD[y][x][1] / 1000.0, threeD[y][x][2] / 1000.0, "m")
distance = math.sqrt(threeD[y][x][0] ** 2 + threeD[y][x][1] ** 2 + threeD[y][x][2] ** 2)
distance = distance / 1000.0 # mm -> m
print("距离是:", distance, "m")
# 加载视频文件
capture = cv2.VideoCapture(0)
WIN_NAME = 'Deep disp'
cv2.namedWindow(WIN_NAME, cv2.WINDOW_AUTOSIZE)
# 读取视频
fps = 0.0
ret, frame = capture.read()
while ret:
# 开始计时
t1 = time.time()
# 是否读取到了帧,读取到了则为True
ret, frame = capture.read()
# 切割为左右两张图片
frame1 = frame[0:480, 0:320]
frame2 = frame[0:480, 320:640]
# 将BGR格式转换成灰度图片,用于畸变矫正
imgL = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)
imgR = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)
# 重映射,就是把一幅图像中某位置的像素放置到另一个图片指定位置的过程。
# 依据MATLAB测量数据重建无畸变图片,输入图片要求为灰度图
img1_rectified = cv2.remap(imgL, left_map1, left_map2, cv2.INTER_LINEAR)
img2_rectified = cv2.remap(imgR, right_map1, right_map2, cv2.INTER_LINEAR)
# 转换为opencv的BGR格式
imageL = cv2.cvtColor(img1_rectified, cv2.COLOR_GRAY2BGR)
imageR = cv2.cvtColor(img2_rectified, cv2.COLOR_GRAY2BGR)
# ------------------------------------SGBM算法----------------------------------------------------------
# blockSize 深度图成块,blocksize越低,其深度图就越零碎,0
# img_channels BGR图像的颜色通道,img_channels=3,不可更改
# numDisparities SGBM感知的范围,越大生成的精度越好,速度越慢,需要被16整除,如numDisparities
# 取16、32、48、64等
# mode sgbm算法选择模式,以速度由快到慢为:STEREO_SGBM_MODE_SGBM_3WAY、
# STEREO_SGBM_MODE_HH4、STEREO_SGBM_MODE_SGBM、STEREO_SGBM_MODE_HH。精度反之
# ------------------------------------------------------------------------------------------------------
blockSize = 3
img_channels = 3
stereo = cv2.StereoSGBM_create(minDisparity=1,
numDisparities=64,
blockSize=blockSize,
P1=8 * img_channels * blockSize * blockSize,
P2=32 * img_channels * blockSize * blockSize,
disp12MaxDiff=-1,
preFilterCap=1,
uniquenessRatio=10,
speckleWindowSize=100,
speckleRange=100,
mode=cv2.STEREO_SGBM_MODE_HH)
# 计算视差
disparity = stereo.compute(img1_rectified, img2_rectified)
# 归一化函数算法,生成深度图(灰度图)
disp = cv2.normalize(disparity, disparity, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)
# 生成深度图(颜色图)
dis_color = disparity
dis_color = cv2.normalize(dis_color, None, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)
dis_color = cv2.applyColorMap(dis_color, 2)
# 计算三维坐标数据值
threeD = cv2.reprojectImageTo3D(disparity, Q, handleMissingValues=True)
# 计算出的threeD,需要乘以16,才等于现实中的距离
threeD = threeD * 16
# 鼠标回调事件
cv2.setMouseCallback("depth", onmouse_pick_points, threeD)
#完成计时,计算帧率
fps = (fps + (1. / (time.time() - t1))) / 2
frame = cv2.putText(frame, "fps= %.2f" % (fps), (0, 40), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow("depth", dis_color)
cv2.imshow("left", frame1)
cv2.imshow(WIN_NAME, disp) # 显示深度图的双目画面
# 若键盘按下q则退出播放
if cv2.waitKey(1) & 0xff == ord('q'):
break
# 释放资源
capture.release()
# 关闭所有窗口
cv2.destroyAllWindows()
效果如下所示
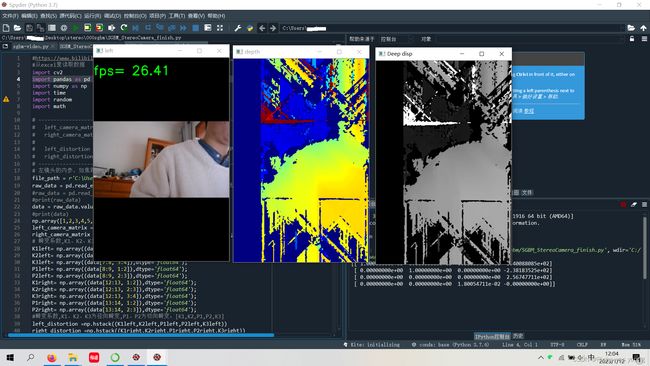 点击depth即可测距
点击depth即可测距
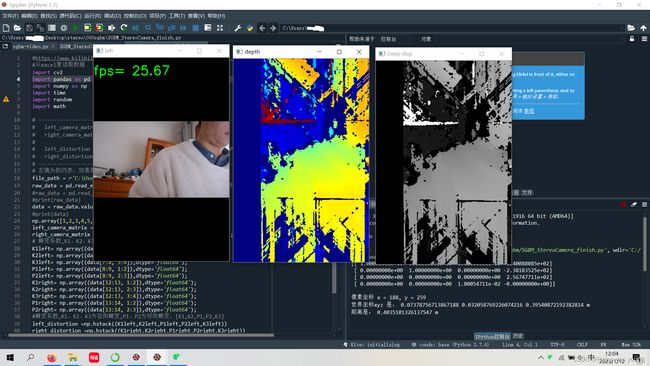 效果如下所示
效果如下所示