【Linux配置五】 Ubuntu18.04+kalibr标定工具箱安装编译
一、安装kalibr
1、安装依赖项
所有 Ubuntu 版本的通用要求如下:
sudo apt-get install -y \
git wget autoconf automake nano \
libeigen3-dev libboost-all-dev libsuitesparse-dev \
doxygen libopencv-dev \
libpoco-dev libtbb-dev libblas-dev liblapack-dev libv4l-dev
然后由于不同的Python版本,您将需要安装以下内容:
# Ubuntu 16.04
sudo apt-get install -y python2.7-dev python-pip python-scipy \
python-matplotlib ipython python-wxgtk3.0 python-tk python-igraph
# Ubuntu 18.04
sudo apt-get install -y python3-dev python-pip python-scipy \
python-matplotlib ipython python-wxgtk4.0 python-tk python-igraph
# Ubuntu 20.04
sudo apt-get install -y python3-dev python3-pip python3-scipy \
python3-matplotlib ipython3 python3-wxgtk4.0 python3-tk python3-igraph
本文为ubuntu18.04系统,安装命令如下:
sudo apt-get install -y python3-dev python-pip python-scipy \
python-matplotlib ipython python-wxgtk4.0 python-tk python-igraph
注:安装python-igraph时,我用pip命令无法安装,故改为apt-get命令,安装得很顺利。
2、创建kalibr的工作空间
Ubuntu18.04 创建kalibr的工作空间
mkdir -p ~/kalibr_workspace/src
cd ~/kalibr_workspace
source /opt/ros/melodic/setup.bash
catkin init
catkin config --extend /opt/ros/melodic
catkin config --merge-devel
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release
3、源码下载
地址:https://github.com/ethz-asl/kalibr
官网教程是从网站克隆,但克隆版本并不符合安装系统,总是出错,显示kalibr_calibrate_imu_camera命令未找到,多次重新编译也未成功。
所以本文选用kalibr与ubuntu18.04对应的版本(其他ubuntu系统同理)
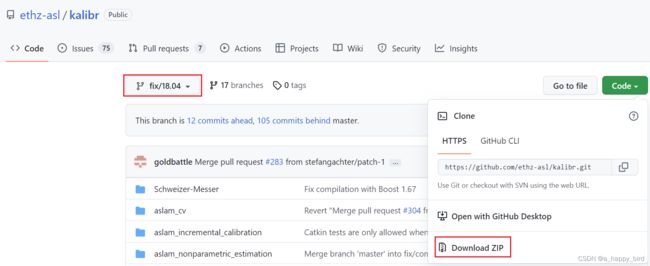
下载后将kalibr-fix-18.04.zip解压到 ~/kalibr_workspace/src文件夹下:

4、源码编译
cd ~/kalibr_workspace/
catkin build -DCMAKE_BUILD_TYPE=Release -j4
5、安装过程中的报错
如果出现错误,可以多编译几次,好多错误重新编译就没有了catkin build -DCMAKE_BUILD_TYPE=Release -j4
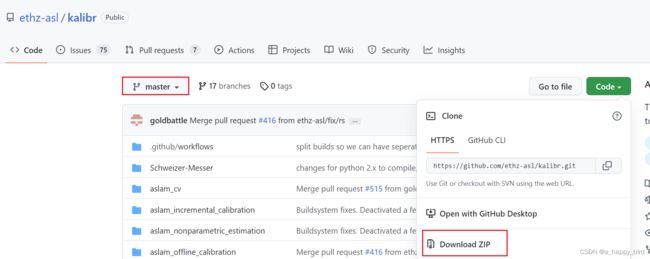
5.1 下载kalibr-master做备用
一般的,如果编译错误,将报错所指路径文件全部替换为kalibr-master对应的文件,简单粗暴,亲测有效
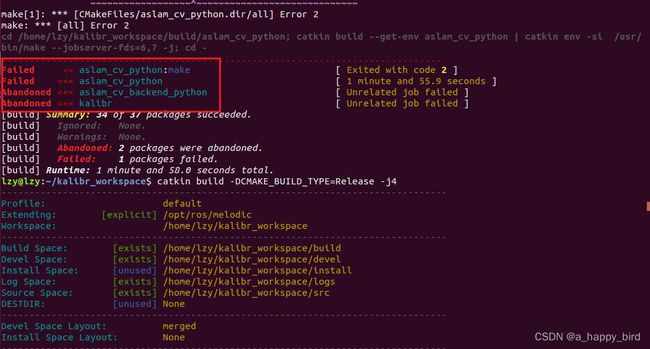
5.2 报错一
将~/kalibr_workspace/src/aslam_cv文件夹下的aslam_cv_python aslam_cv_backend_python 替换为kalibr-master对应的文件
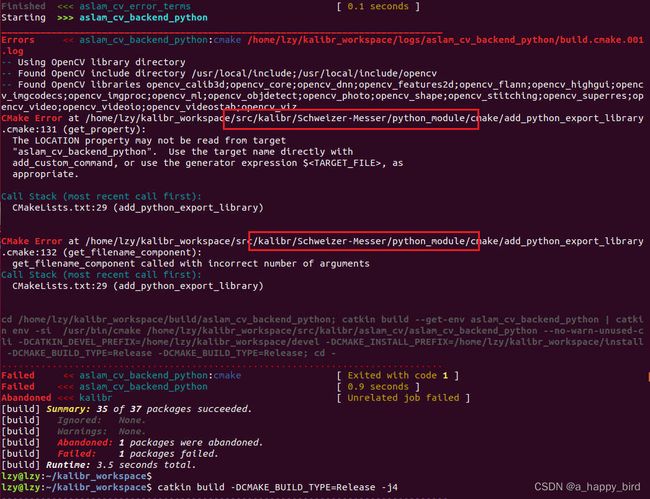
5.3 报错二
将~/kalibr_workspace/src/kalibr/Schweizer-Messer文件夹下的python_module替换为kalibr-master对应的文件
5.4 安装成功
注意:37个包,不是36个包

安装kalibr参考:
http://t.csdn.cn/TzErH
http://t.csdn.cn/yydgf
二、测试kalibr
1、测试相机标定
1) 官网下载相机标定测试数据

2) 在kalibr_workspace文件夹下新建一个文件夹camera0放置下载的数据,camera0文件夹里面存放下载的数据。

3)在kalibr_workspace文件夹下打开终端,输入命令,别忘了设置环境
// 设置环境,否则报错 --- kalibr_calibrate_cameras:未找到命令
source ~/kalibr_workspace/devel/setup.bash
kalibr_calibrate_cameras \
--target /YOUR PATH/april_6x6.yaml \
--bag /YOUR PATH/cam_april.bag --bag-from-to 30 50 \
--models pinhole-fov \
--topics /cam0/image_raw
我的路径是/home/lzy/kalibr_workspace/camera0/,因此指令为:
source ~/kalibr_workspace/devel/setup.bash
kalibr_calibrate_cameras \
--target /home/lzy/kalibr_workspace/camera0/april_6x6.yaml \
--bag /home/lzy/kalibr_workspace/camera0/cam_april.bag --bag-from-to 30 50 \
--models pinhole-fov \
--topics /cam0/image_raw
2、测试相机与imu联合标定
1) 从https://pan.baidu.com/s/1bWQT7g提取码2g2t下载数据包,将解压后dynamic的放在工作空间kalibr_workspace里
2)在kalibr_workspace文件夹下打开终端,输入命令,别忘了设置环境
source ~/kalibr_workspace/devel/setup.bash
kalibr_calibrate_imu_camera \
--target /YOUR PATH/april_6x6.yaml \
--cam /YOUR PATH/camchain.yaml \
--imu /YOUR PATH/imu_adis16448.yaml \
--bag /YOUR PATH/dynamic.bag --bag-from-to 5 45
我的路径是/home/lzy/kalibr_workspace/dynamic,因此指令为:
source ~/kalibr_workspace/devel/setup.bash
kalibr_calibrate_imu_camera \
--target /home/lzy/kalibr_workspace/dynamic/april_6x6.yaml \
--cam /home/lzy/kalibr_workspace/dynamic/camchain.yaml \
--imu /home/lzy/kalibr_workspace/dynamic/imu_adis16448.yaml \
--bag /home/lzy/kalibr_workspace/dynamic/dynamic.bag --bag-from-to 5 45
![]()
标定完成后,会生成下面4个文件。其中比较关注的IMU和相机变换矩阵和timeshift都在以camchain命名的.yaml文件中,在results的txt文件中也可以看到

测试kalibr参考:
http://t.csdn.cn/yydgf
三、实践
1、标定imu
本文标定的imu为sbg
注意事项:
1、 imu 录制时必须静置不动,官方建议两个小时以上;录制时话题类型不做要求,标定时类型必须是sensor_msgs/Imu
2、imu 标定时话题类型必须是sensor_msgs/Imu
3、imu 标定时不要求xyz轴必须是右前上之类的
1.1 安装imu_utils
1.1.1 安装ceres
此项为必要依赖。本机在前续使用中已安装了ceres-1.14.0,此处记录对应版本仅供参考,Github上有最新版本应该是2.0.0。ceres-solver同时还需依赖eigen,本机前续使用中已安装了eigen-3.3.7。
1)安装ceres的一些相关依赖(参考http://www.ceres-solver.org/installation.html)[2]
# CMake
sudo apt-get install cmake
# google-glog + gflags
sudo apt-get install libgoogle-glog-dev libgflags-dev
# BLAS & LAPACK
sudo apt-get install libatlas-base-dev
# SuiteSparse and CXSparse (optional)
sudo apt-get install libsuitesparse-dev
2)build, test, and install Ceres
# 已提前下载好的压缩包,没有下载要先去git
tar zxf ~/Documents/ceres-solver-1.14.0.tar.gz
mkdir ceres-bin
cd ceres-bin
cmake ../ceres-solver-1.14.0
make -j4
make test
sudo make install
1.1.2 安装code_utils
sudo apt-get install libdw-dev
mkdir -p ~/kalibr_imu/src
cd kalibr_imu/src
git clone https://github.com/gaowenliang/code_utils.git
这里需要修改 code_utils 的 CMakeLists.txt 文件,将 CMAKE_CXX_FLAGS “-std=c++11” 改为 CMAKE_CXX_STANDARD 14 并添加 include_directories(include/code_utils)。然后在~/kalibr_imu路径下执行catkin_make。这里也是因为后面下载的imu_utils编译时是需要依赖code_utils的,所以这里先单独编译一下,当然也可以在两个包都下好的情况下使用catkin_make -DCATKIN_WHITELIST_PACKAGES=‘code_utils’先指定编译,再catkin_make -DCATKIN_WHITELIST_PACKAGES=’‘全部编译。
1.1.3 安装imu_utils
cd kalibr_imu/src
git clone https://github.com/gaowenliang/imu_utils.git
cd ..
catkin_make
同样,在catkin_make前,需要修改imu_utils 的 CMakeLists.txt 文件,将 CMAKE_CXX_FLAGS “-std=c++11” 改为 CMAKE_CXX_STANDARD 14。
1.2 录制IMU数据及标定
sbg录制的话题为/sbg/imu_data,其类型是自定义类型sbg_driver/SbgImuData
sbg标定的话题为/imu0,其类型是sensor_msgs/Imu
1.2.1 录制imu数据(sbg)
sbg的使用教程:https://github.com/SBG-Systems/sbg_ros_driver
sbg录制的话题为/sbg/imu_data,其类型是自定义类型sbg_driver/SbgImuData,后续标定前需要将其类型转为sensor_msgs/Imu
启动sbg驱动
roslaunch sbg_driver sbg_device.launch
录制imu,话题为/sbg/imu_data
rosbag record /sbg/imu_data -o sbg.bag
查看imu频率
rosrun rqt_topic rqt_topic
1.2.2 标定及结果
1)配置imu_utils/launch路径下的sbg.launch,相应名称和参数应以自己IMU为准。
需要修改的参数:
imu 话题"imu_topic"需要与录制时的话题保持一致,类型为sensor_msgs/Imu
imu 名字"imu_name"自定义,建议与launch名保持一致,决定后续标定结果的文件名
imu 加载时间"max_time_min",单位为分钟,表示从rosbag中加载数据的时间长度,根据实际录制的时间确定,官方建议两小时以上
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/imu0"/>
<param name="imu_name" type="string" value= "sbg"/>
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/>
<param name="max_time_min" type="int" value= "50"/>
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>
2)启动.launch文件,播放录制的IMU数据包。
此时的sbg.bag是已经将话题类型修改为sensor_msgs/Imu之后的bag包
# 启动.launch文件
cd kalibr_imu
source devel/setup.bash
roslaunch imu_utils sbg.launch
# 在对应路径下播放数据包,使用-r 200来倍速播放
rosbag play -r 200 sbg.bag
3)完成后可以在imu_utils/data路径下找到与imu_name对应的xxx_imu_param.yaml文件。
sbg_imu_param.yaml如下。其中_n代表noise,_w代表random walk。
%YAML:1.0
---
type: IMU
name: sbg
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 4.9437760129591220e-04
gyr_w: 3.0009989457718918e-05
x-axis:
gyr_n: 4.6063631944431345e-04
gyr_w: 2.6747246508923371e-05
y-axis:
gyr_n: 4.8208450909023370e-04
gyr_w: 2.5466994384681401e-05
z-axis:
gyr_n: 5.4041197535318935e-04
gyr_w: 3.7815727479551984e-05
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 6.2662678044191102e-03
acc_w: 2.8805164533371702e-04
x-axis:
acc_n: 6.5695260918416801e-03
acc_w: 2.6707017662488822e-04
y-axis:
acc_n: 6.7936962756448083e-03
acc_w: 4.2277805228637218e-04
z-axis:
acc_n: 5.4355810457708429e-03
acc_w: 1.7430670708989062e-04
2、标定camera
本文标定的是深度相机kinectV1
本文录制的话题是 /camera/rgb/image_color,其类型为sensor_msgs/Image
下载标定板时建议下载原尺寸标定板,比如Aprilgrid 6x6 0.8x0.8 m (A0 page)就是A0纸
标定结果,重投影误差在1~2pix之内,比较好。重投影误差较大,建议重新录制bag包
注意:
1、相机录制频率为4Hz
2、相机录制的话题名称无所谓,但是话题类型必须是sensor_msgs/Image
3、标定相机命令里面的模型必须选对,本文选取的是--models pinhole-radtan,否则会报错,这一步非常重要。具体模型参考https://github.com/ethz-asl/kalibr/wiki/supported-models
4、相机标定模型根据要标定的数据选取,比如我需要标定的是(intrinsics vector: [fu fv pu pv])和(distortion_coeffs: [k1 k2 r1 r2]),故选取--models pinhole-radtan
2.1 采集相机数据
启动深度相机kinectV1
source devel/setup.bash
roslaunch freenect_launch freenect.launch
将话题 /camera/rgb/image_color频率修改为20Hz
rosrun topic_tools throttle messages /camera/rgb/image_color 20.0 /my_image_color
录制bag
rosbag record /my_image_color -o my_image_color.bag
打开相机屏幕
rosrun rqt_image_view rqt_image_view
录取bag个人经验:
1、录取时长最少3分钟。--bag-from-to 25 150 最少120s,图片数量500张左右。
2、录取过程中要缓慢移动,倾斜。标定板位置最好出现在rqt_image_view 视野的各个位置

2.2 下载并打印标定板
标定板下载地址:https://github.com/ethz-asl/kalibr/wiki/downloads
本文选择的是 Aprilgrid 6x6 0.8x0.8 m (A0 page),创建或修改april_6x6.yaml。以下是A4纸下的尺寸
#example for aprilgrid
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.021 #size of apriltag, edge to edge [m]
tagSpacing: 0.2857 #ratio of space between tags to tagSize
#example: tagSize=2m, spacing=0.5m --> tagSpacing=0.25[-]
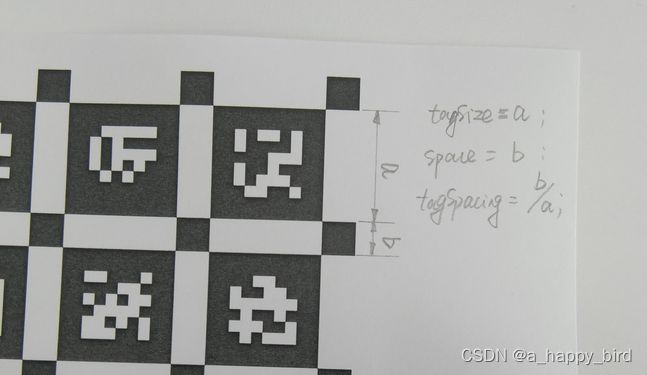
上图来源:https://github.com/ethz-asl/kalibr/wiki/calibration-targets
2.3 标定相机
在kalibr_workspace文件夹下新建一个文件夹camera,放置录制好的my_image_color.bag和修改后的april_6x6.yaml

在kalibr_workspace文件夹下打开终端,输入
source devel/setup.bash
kalibr_calibrate_cameras \
--target /home/lzy/kalibr_workspace/camera/april_6x6.yaml \
--bag /home/lzy/kalibr_workspace/camera/my_image_color.bag --bag-from-to 25 150 \
--models pinhole-radtan \
--topics /my_image_color
应用时,注意修改路径
2.4 报错
[ERROR] [1656413643.074323]: initialization of focal length for cam with topic /my_image_color
[ERROR] [1656413643.084323]: calibrateIntrinsics: Optimization failed!
[ERROR] [1656413643.093601]: initialization of intrinsics for cam with topic /my_image_color failed
解决方法:
1、确定选取的相机模型是否正确,模型不对的话会导致上述问题,具体模型参考https://github.com/ethz-asl/kalibr/wiki/supported-models。基本模型正确的话,会解决大部分问题。
2、模型选取正确依然报错的话,修改aslam_cv/aslam_cameras/include/aslam/cameras/implementation/PinholeProjection.hpp文件的下列部分。位置760行左右,建议直接Ctrl+F搜索if(f_guesses.empty())
#include 修改后的标定命令为
source devel/setup.bash
export KALIBR_MANUAL_FOCAL_LENGTH_INIT=True
kalibr_calibrate_cameras \
--target /home/lzy/kalibr_workspace/camera/april_6x6.yaml \
--bag /home/lzy/kalibr_workspace/camera/my_image_color.bag --bag-from-to 25 150 \
--models pinhole-radtan \
--topics /my_image_color
3、camera-imu 联合标定
imu:sbg 、频率100Hz、话题类型sensor_msgs/Imu
camera:kinectV1 、频率4Hz、话题类型sensor_msgs/Image
imu和 camera 的bag可以分开录制,最好整合成一个bag就行了;分开录制要求时间重合。
3.1 录制imu
启动sbg驱动
roslaunch sbg_driver sbg_device.launch
录制imu,话题为/sbg/imu_data。注意此时的话题类型是自定义类型,后续要把类型改为sensor_msgs/Imu
rosbag record /sbg/imu_data -o imu_sbg.bag
查看imu频率
rosrun rqt_topic rqt_topic
3.2 录制camera
启动深度相机kinectV1
source devel/setup.bash
roslaunch freenect_launch freenect.launch
将话题 /camera/rgb/image_color频率修改为4Hz
rosrun topic_tools throttle messages /camera/rgb/image_color 4.0 /my_image_color
录制bag
rosbag record /my_image_color -o my_image_color.bag
打开相机屏幕
rosrun rqt_image_view rqt_image_view
3.3 bag整合
将imu_sbg.bag里面话题类型改为sensor_msgs/Imu
将my_image_color.bag里面话题类型改为sensor_msgs/Image
将话题修改后的imu_sbg.bag和my_image_color.bag整合成一个bag包,即kalibr.bag,信息如下
Topics Types Message Count Frequency
0 /cam0/image_raw sensor_msgs/Image 568 3.758933
1 /imu0 sensor_msgs/Imu 14587 52428.800000
3.4 IMU内参yaml、相机内外参yaml、标定板yaml
1)相机内外参yaml就用在前续2.2.3相机标定结果中获得的以camchain开头命名的.yaml文件即可;注意rostopic
cam0:
cam_overlaps: []
camera_model: pinhole
distortion_coeffs: [0.11954846981816165, -0.1358152244503053, -0.003688000623544225,
0.0026429797169365]
distortion_model: radtan
intrinsics: [426.9314446745908, 427.0007202207628, 320.2282058993642, 266.1083473596716]
resolution: [640, 480]
rostopic: /cam0/image_raw
2)标定板yaml使用前续2.2.2中创建的标定板yaml文件即可;
#example for aprilgrid
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.021 #size of apriltag, edge to edge [m]
tagSpacing: 0.2857 #ratio of space between tags to tagSize
#example: tagSize=2m, spacing=0.5m --> tagSpacing=0.25[-]
#example for checkerboard
# targetType: 'checkerboard' #gridtype
# targetCols: 6 #number of internal chessboard corners
# targetRows: 7 #number of internal chessboard corners
# rowsMetricSize: 0.06 #size of one chessboard square [m]
# colsMetricSize: 0.06 #size of one chessboard square [m]
3)联合标定中imu内参yaml格式如下,并不能直接拿imu_utils的标定结果yaml文件来用,否则会报错。yaml其中各项可依照前续1.2.2imu标定结果中填入avg-axes的对应值。注意rostopic和频率update_rate
rostopic: /imu0
update_rate: 100.0 #Hz
accelerometer_noise_density: 6.2662678044191102e-03 #continous
accelerometer_random_walk: 2.8805164533371702e-04
gyroscope_noise_density: 4.9437760129591220e-04 #continous
gyroscope_random_walk: 3.0009989457718918e-05
注意:
查看 IMU内参yaml、相机内外参yaml里面的rostopic是否与录制的bag话题一致
3.5 联合标定
在kalibr_workspace文件夹下打开终端,输入如下命令
source ~/kalibr_workspace/devel/setup.bash
kalibr_calibrate_imu_camera \
--target /home/lzy/kalibr_workspace/camera_imu/april_6x6.yaml \
--cam /home/lzy/kalibr_workspace/camera_imu/camchain.yaml \
--imu /home/lzy/kalibr_workspace/camera_imu/imu_sbg.yaml \
--bag /home/lzy/kalibr_workspace/camera_imu/kalibr.bag --bag-from-to 15 45
–target 后面是标定板yaml的绝对路径;
–cam 后面相机内外参yaml(camchain-xxx.yaml)的绝对路径;
–imu 后面是对应格式的imu内参yaml的绝对路径;
–bag 后面是录制的数据包的绝对路径;
–bag-from-to 后面是想要使用数据时间段的起始时间和结束时间,单位:秒(s)
–show-extraction 是在标定过程中的一个显示界面,可以看到图片提取的过程,可以不要。
注意:实际应用时需要将命令里面的参数改为相应的参数,比如路径和yaml
2)标定完成后,会生成下面4个文件。其中比较关注的IMU和相机变换矩阵和timeshift都在以camchain命名的.yaml文件中,在results的txt文件中也可以看到。

实践kalibr参考:
http://t.csdn.cn/mUfC1 【kalibr标定realsenseD435i(二)–多相机标定】
https://guyuehome.com/34592 【Kalibr使用:imu+camera联合标定过程详解】
http://t.csdn.cn/PfkKl 【VIO测试准备——使用imu_utils和kalibr进行相机与IMU标定】,个人感觉比较好
http://t.csdn.cn/ALqjU 【Kalibr 之 Camera-IMU 标定 (总结)】
http://t.csdn.cn/ine8X【kalibr使用笔记】 bug总结
配套安装包
https://download.csdn.net/download/a_happy_bird/85721502